

Geodeziya_1_chastina_26-09-2011
.pdf191
Унаслідок помилок, які виникають при вимірюванні кутів нахилу і довжин, сторін висота Н'b пункту В, обчислена за останньою формулою, буде відрізнятися від її наданого значення Нb на величину ωh, яка називається нев’язкою ходу по висоті. Отже, в дійсності будемо мати таке рівняння:
n
h (Hb H a ) h .
1
Допустиме значення висотної нев’язки при технічному нівелюванні визначається за формулою
(ωh)доп.= 50мм L ,
L ,
де L – довжина ходу в км.
Якщо величина висотної нев’язки не перевищує допустимої величини, то виконується врівноваження обчислених перевищень точок ходу шляхом обчислення таких поправок до перевищень, які б усували нев’язку ходу по висоті.
При тригонометричному нівелюванні нев’язка ωh збільшується пропорційно квадрату віддалення точки ходу від вихідного пункта. Але в теодолітних ходах для спрощення обчислень вона розподіляється пропорційно довжинам ліній. Тому при врівноваженні перевищень поправки ∆h обчислюються за формулою
hі dh dі ,
де ∆hі – поправка до і-го перевищення; ωh – нев’язка ходу по висоті;
[d] – довжина ходу;
dі – довжина і-ї сторони ходу.
Остаточні висоти точок теодолітного ходу обчислюються за формулою
Hі Hі 1 (hі 1 hі 1 ).
192
Контролем правильності обчислень служить тотожність обчисленого значення висоти кінцевого вихідного пункту
їїнаданому значенню.
16.Побудова плану теодолітної зйомки
16.1. Побудова плану полігону (ходу) за виміряними кутами і горизонтальними прокладеннями
Для невеликих ділянок (землеволодінь і землекористувань) план можна скласти за виміряними на місцевості кутами і лініями. Кути на плані при цьому будують за допомогою транспортира, а лінії відкладають за допомогою масштабної лінійки. Але такий спосіб побудови плану має недолік, який полягає в тому, що похибка побудови кожного кута викликає поворот всієї наступної частини полігону або ходу і тим самим знижує точність побудови плану.
Цього недоліку можна уникнути, якщо будувати план за румбами. Для побудови плану полігону посередині аркуша, на якому будується план, проводять лінію ПнПд (рис. 71), яку приймають паралельною осьовому меридіану. Якщо план витягнутий із заходу на схід, то можна провести декілька ліній, паралельних осьовому меридіанові.
Починати побудову можна з будь-якої точки полігону, але необхідно правильно обрати її положення на аркуші з тим, щоби план полігону був розташований посередині аркуша. Для цього інколи попередньо будують полігон наближено, потім, наклавши його на аркуш, намічають положення вихідної точки.
Напрямки ліній за румбами будують за допомогою транспортира так. Центр транспортира прикладають до лінії ПнПд і повертають транспортир так, щоби на цій лінії по дузі транспортира отримати відлік, який відповідає величині румба.

193
Рис. 71. Побудова плану полігону (ходу)
Для північно-східного і південно-західного напрямків, транспортир розташовують так, як зазначено на рис. 71, а, а для північно-західного і південно-східного напрямків – як зазначено на рис. 71, б. Для того, щоби передати напрямок АВ до точок полігону, користуються лінійкою і трикутником, який пересувається по лінійці.
Нехай вихідною буде точка полігону 1. Окресливши її положення колом, будують за допомогою транспортира румб лінії 1-2, як показано на рис. 71, б, і передають цей напрямок за допомогою трикутника і лінійки до зазначеної точки (рис. 72). Потім у прийнятому масштабі відкладають довжину лінії 1-2.
Після цього аналогічні дії виконують на точці 2. Продовжуючи в такій же послідовності, будують полігон (на рис. 72 побудований полігон показаний тонкими лініями), отримують положення точки 1', яке, як правило, не збігається з точкою 1.
Рис. 72. Урівноваження способом паралельних ліній
Відрізок 1-1' і є нев’язкою fs у периметрі полігону, отримаотримана в результаті похибок вимірювання кутів і ліній на місцевості, а головне, похибок побудови румбів транс-

194
портиром і відкладання ліній за масштабом.
Величина нев’язки в периметрі насамперед залежить від периметра полігону.
Нев’язку вважають допустимою, якщо вона не перевищує 3001 периметра полігону.
Полігони, нев’язка в периметрі яких допустима, врівноважують за способом паралельних ліній. Для усунення нев’язки необхідно точку 1' пересунути в точку 1 (див. рис. 72). Це викличе переміщення решти точок паралельно нев’язці і в той самий бік. У зв’язку з тим, що нев’язка була отримана в результаті накопичення похибок вимірювань і побудов приблизно пропорційно периметру, поправка щодо положення точки визначається пропорційно відстані від вихідної до тієї точок, в положення якої вводиться поправка. Згідно з викладеним точка 1 залишиться на місці, а поправка в положення точки 2 буде
звідки
для і-ї точки
і
Для точки 1'
1/
|
2 |
|
|
S1 |
|
|
, |
|
|
|
|
||||
n |
|
|
|
|
|
|
|||||||||
|
fs |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
S |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
fs |
|
|
S |
1 |
, |
|
|
|
|
|
n |
|
|
|
|
||||||||
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
fs |
|
|
(S |
1 |
S |
2 |
... S |
n 1 |
). |
|||||
|
n |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
S |
|
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
(S1 S2 |
... Sn ) fs . |
|||||||||
|
s |
|
|
|
|||||||||||
|
n |
|
|
|
|||||||||||
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
195
Поправки відкладають від відповідної точки паралельно напрямку нев’язки й отримують виправлене положення точок. З’єднавши їх прямими, отримаємо положення врівноваженого полігону.
Недоліком складання плану полігону (ходу) за румбами є те, що похибка побудови кожної точки полігону впливає на похибку положення наступних точок, хоча і менше, ніж при побудові полігону за внутрішніми кутами.
Цим і пояснюється, що для більшості ділянок використовують більш точний спосіб складання плану – за координатами точок, обчислених у результаті обробки теодолітних полігонів (ходів).
16.2. Побудова прямокутної координатної сітки
Координатну сітку будують для підвищення точності складання плану, зручності користування планом при проектуванні і перенесенні проекту в натуру, а також щоби при нанесенні точок на план за координатами або при користуванні планом не відкладати циркулем-вимірником відстані більше 10 см. Сторони квадратів координатної сітки вважають такими, що дорівнюють 10 см і лише для планів масштабом 1 : 25 000 – 8 см.
Існує кілька способів побудови координатної сітки, які застосовуються в залежності від розмірів планів і технічних можливостей.
При невеликих розмірах планів координатну сітку можна побудувати за допомогою циркуля-вимірника і масштабної лінійки (рис. 73). Для цього на аркуші картографічного паперу проводять дві діагоналі АВ і СD. Від точки перетину цих діагоналей О відкладають рівні відрізки. Отримані точки а, b, с і d з’єднують прямими лініями. Від точок а і d, за допомогою циркуля-вимірника і масштабної лінійки, по лініях ас і db, відкладають відрізки довжиною 10 см. Отримані точки з’єднують між собою. Аналогічні
196
дії виконують по лініях аd і сb. Як результат отримаємо сітку квадратів. Циркулем-вимірником перевіряють правильність побудови координатної сітки шляхом вимірювання діагоналей її квадратів. Довжини діагоналей повинні дорівнюватися – 14,14 см або відрізнятися від цієї величини не більш ніж на 0,2 мм.
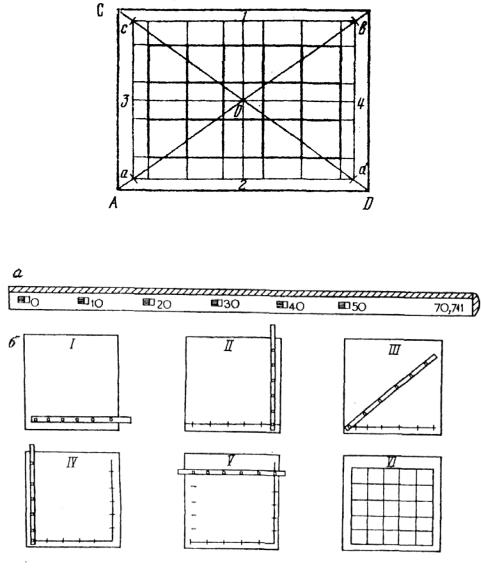
Рис. 73. Побудова координатної сітки за допомогою циркуля-вимірника
Рис. 74. Побудова координатної сітки за допомогою лінійки Дробишева (ЛД-1)
Координатні сітки 50 х 50 см зручно будувати за допомогою лінійки Ф.В. Дробишева ЛД-1 (рис. 74, а). ЛД-1 являє собою металеву лінійку з укісними ребрами для про-
197
креслення ліній. По довжині лінійки через 10 см розташовані шість прямокутних вирізів (вікон). Укісний край першого вирізу зроблений по прямій, а краї решти вирізів і укісний торець мають форму дуг кіл радіусів 10, 20, 30, 40, 50 і 70,711 см, центр яких знаходиться в точці перетину штриха з укісним ребром крайнього вікна 0. Побудова прямого кута лінійкою Дробишева полягає в побудові прямого трикутника з катетами по 50 см і гіпотенузою 70,711. Порядок побудови координатної сітки такий (рис. 74).
Уположенні І проводять пряму лінію, на який за вікнами відмічають шість рисок. У положенні ІІ суміщають штрих, нанесений посередині укісного краю першого вирізу, з кінцем лінії, отриманої в положенні І, і за вирізами роблять п’ять рисок. У положенні ІІІ суміщають середину укісного краю першого вирізу з однією з точок першої риски, отриманої в положенні І, і кінцем лінійки засікають останню дугу, отриману в положенні ІІ. Так отримують перший прямокутний трикутник. Побудувавши другий прямокутний трикутник, як показано на рис. 74 (положення ІV і V), з’єднавши точки, розташовані на протилежних сторонах побудованого в такий спосіб прямокутника, отримують сітку квадратів (положення VІ).
При правильній побудові сітки 5 х 5 квадратів вершини малих квадратів повинні знаходитись на діагоналях великого квадрата або на лініях, паралельних до них. Розходження між діагоналями малих квадратів не повинні перевищувати 0,2 мм. При недотриманні зазначених умов сітку квадратів будують наново.
Побудову координатної сітки на планшеті найзручніше виконувати за допомогою спеціального приладу – координатографа.
Упрактиці топографічних робіт використовуються координатографи різних систем, які відрізняються як особ-
198
ливостями конструкції, так і точністю. Координатографи бувають польові і стаціонарні. За допомогою координатографів одночасно з побудовою координатної сітки можна за координатами наносити точки на план з точністю 0,05 мм.
Розглянемо будову координатографа на прикладі МК-2 (малий координатограф, модель 2).
Координатограф складається з таких основних частин:
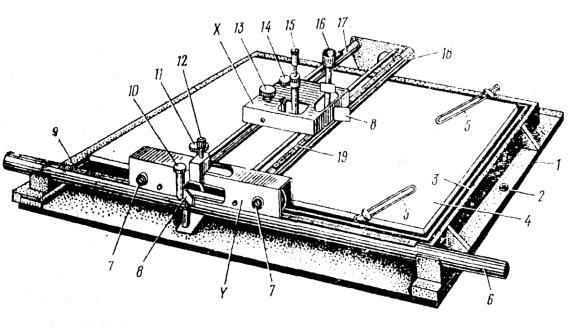
станини 1 (рис. 75), яка для встановлення приладу в горизонтальне положення має знизу чотири підйомних гвинтів, а зверху круглий рівень 2;
рами 3, на якій за допомогою чотирьох затисків 5 закріплюється планшет 4. Рама з планшетом за допомогою гвинти для регулювання може бути повернута на деякий кут, що дозволяє враховувати величину зближення меридіанів при побудові координатної сітки;
циліндричної спрямовуючої 6 (спрямовуючої Y), по якій переміщується велика каретка (каретка Y). На верхньому зрізі циліндричної спрямовуючої розміщена вимірювальна лінійка 9, яка має дві шкали з поділками через 1 мм. Одна зі шкал призначена для наближених відліків, інша – для точних;
великої каретки (каретки Y), на якій для відрахову-
вання координат закріплений шкаловий мікроскоп 12 зі збільшенням 28x. Встановлення каретки на заданий відлік здійснюється за допомогою закріплюючого 10 і навідного 11 гвинтів;
циліндричних спрямовуючих 17 і 18 (спрямовуючої Х), жорстко скріплених із великою кареткою. За цими спрямовуючими переміщується мала каретка (каретка Х). На циліндричній спрямовуючій 18 закріплена вимірювальна лінійка 19, яка має такі самі дві шкали, як і лінійка 9;
199
малої каретки (каретка Х), яка має шкаловий мікроскоп 16, закріпний 14 і навідний 13 гвинти та голку 15 для наколювання точок на планшеті.
Рис. 75. Малий координатограф МК-2
1 – станина; 2 – рівень; 3 – рама; 4 – планшет; 5 – затискувачі; 6 - циліндрична спрямовуюча; 7 - ролики; 8 – дзеркало; 9 – лінійка; 10, 14 – закріпні гвинти; 11, 13 – навідні гвин-
ти; 12, 16 – шкалові мікроскопи; 15 – голка; 17, 18 – циліндричні спрямовуючі; 19 – вимірювальна лінійка; Х, У – каретки.
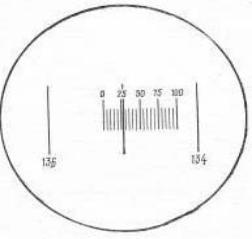
Сутність зняття відліків по шкаловому мікроскопу полягає у тому, що в полі зору мікроскопа (рис. 76) на штрихи вимірювальної лінійки проектується шкала, яка складається із двадцяти поділок, проведених через 0,05 мм. Поділка з підписом 0 є нуль-пунктом шкали мікроскопа. Ціле число міліметрів відраховується по штриху лінійки, який знаходиться між нуль-пунктом і поділкою шкали з надписом 100, а соті частки міліметра – по шкалі мікроскопа. На рис. 76 відлік по мікроскопу дорівнює 135,27 мм. Поле зору освітлюється поворотом дзеркала 8 (рис. 75).
200
Рис. 76. Поле зору мікроскопа координатографа МК-2
Максимальний розмір робочої площі, яку забезпечує координатограф МК-2, становить 60 х 60 см. Похибка нанесення точок за координатами при ретельному регулюванні координатографа не перевищує 0,1 мм. Для забезпечення зазначеної точності перед роботою перевіряють взаємну перпендикулярність спрямовуючих Х і У приладу.
З цією метою на планшет наносять за допомогою координатографа чотири вершини квадрата розміром 60 х 60 см і потім контрольною лінійкою перевіряють тотожність його діагоналей. Неперпендикулярність спрямовуючих виправляють за допомогою виправних гвинтів роликів 7 великої каретки.
Для побудови координатної сітки планшет закріплюють у рамі координатографа так, щоби кути рамки трапеції після їх нанесення розташовувалися симетрично відносно країв планшета. З цією метою при орієнтуванні планшета на рамі координатографа необхідно врахувати величину зближення меридіанів. Після цього голку малої каретки встановлюють над планшетом поблизу його лівого нижнього кута, суміщають нуль-пункти шкал мікроскопів із найближчими штрихами вимірювальної лінійки, надписи яких виражаються цілим числом сантиметрів, і роблять пе-