

Послідовність виконання роботи
1. Ознайомитись з електричними машинами, які входять в експериментальну установку, переписати їх паспортні дані.
2. Вибрати апарати керування, вимірні прилади та скласти електричну схему установки.
3. Зняти швидкісну характеристику двигуна ω = f(Iя) який живиться від системи двигунгенератор з ЕМП без зворотніх зв’язків.
4. Зняти швидкісну характеристику двигуна ω = f(Iя)який живиться від системи двигунгенератор з ЕМП з застосуванням зворотніх зв’язків за струмом та напругою.
5. Побудовати експериментальні характеристики, зробити висновки про виконану роботу.
Таблиця 20.1
Експериментальні дані
|
№ |
Uя |
Ія |
n |
|
ізб |
|
в |
А |
об/хв |
рад/с |
А |
Таблиця 20.2
Експериментальні дані
|
№ |
Uя |
Ія |
n |
|
ізб |
іззU |
іззI |
|
В |
А |
об/хв |
рад/с |
А |
А |
mА |
Зміст звіту
1. Назва роботи.
2. Мета роботи.
3. Послідовність виконання роботи.
4. Схема експериментальної установки.
5. Паспортні дані електричних машин, апаратів керування та вимірних приладів.
6. Експериментальні характеристики
![]() з
зворотними зв’язками і без них.
з
зворотними зв’язками і без них.
7. Висновки.
Питання для самоконтролю
1. Для якої мети використовують обмотки керування ОК1іОК2в схемі установки?
2. Чому ввімкнена компенсаційна обмотка КОпринцип її дії?
З. За допомогою якого елементу схеми можна змінювати частоту обертання двигуна DD?
4. Для якої мети до кожної обмотки збудження та керування ввімкнені паралельно опори rш?
5. Який захист вбудований в автоматах QF1 iQF2?
Лабораторна робота № 21
Дослідження електроприводу постійного струму з магнітним підсилювачем
Мета роботи
Ознайомитись з принципом роботи та експериментально дослідити замкнену та розімкнену системи керування електроприводом з магнітним підсилювачем.
Тривалість заняття
Тривалість лабораторної роботи 4 години.
Обладнання, матеріали та інструменти
Провідники, автоматичний вимикач, магнітні пускачі, двохтактний магнітний підсилювач, двигуни постійного струму з незалежним збудженням, тахогенератор, вимірювальні прилади, випрямлячі.
Місце проведення заняття
Лабораторна робота проводиться в лабораторії електроприводу 7ма.
Загальні відомості
Магнітні підсилювачі МП одержали широке застосування в автоматичних пристроях. Їхні переваги: надійність і довговічність в експлуатації (відсутні, рухомі частини); високий коефіцієнт підсилення; можливість підсилювати дуже малі потужності та сумування сигналів. Недоліком магнітних підсилювачів є їх відносно велика інерційність і постійна часу.
Для кращого розуміння принципу дії магнітного підсилювача слід попередньо розглянути роботу дроселя насичення з підмагніченням, рис. 21.1. Такого типу дросель має дві обмотки постійного (І) і змінного (ІІ) струмів.
Струм в обмотці ІІ визначається рівнянням:
![]() 2(21.1)
2(21.1)
де L індуктивність обмотки ІІ;
Хн індуктивний опір навантаження.
Відомо, що індуктивність з сталлю залежить від степені насичення сталі і може бути виражена формулою
L=w· dФ/dі, (21.2)
де w - число витків обмотки;
Ф магнітний потік сердечника;
i струм, що проходить по обмотці.
Залежність магнітного потоку Ф від струмуі нелінійна і подана кривою намагнічуванняФ=f(i)(рис.21.2а). На початковому лінійному відрізку (до точки В) кривої намагнічування кут βвідносно великий і індуктивність також велика (рис. 21.2б). З даного рисунка видно, що на лінійному відрізку0Віндуктивність від струмуіне залежить. Якщо дальше збільшувати струм похіднаdФ/di яка вимірюється величиноюtg β1зменшується, а відповідно зменшується і індуктивність. Якщо через обмотку дроселя (рис. 21.1) пропустити постійний струм, він створить в осерді постійний магнітний потік, що викличе зменшення індуктивності обмотки ІІ і збільшення в ній струму. НапругаUвих також відповідно зросте. Таким чином, змінюючи величину постійної напругиUможна змінювати величину вихідної змінної напругиUвих.
Рис. 21.1. Схема дроселя з підмагніченням.
Коефіцієнт підсилення по потужності МП визначиться відношенням
![]()
Недоліки розглянутої схеми:
1. В обмотці постійного струму індукується змінна ерс,яка спотворює постійну напругуU обмотки.
2. Нечутливість до полярності вхідного сигналу.
3. Невідповідність нульового значення сигналу нульовому значенню вихідної напруги Uвих.
Такого типу підсилювачі називаються однотактними. Недоліки однотактних МП усунені в двотактних МП, які можуть бути виконані по диференціальній (рис. 21.3) або мостовій (рис. 21.4) схемах.
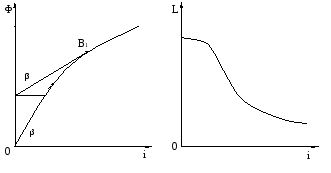
а) б)
Рис. 21.2. Графіки залежностей: а) магнітного потоку від струму, б) індуктивності від струму
Пуск двигуна виконується в такому порядку: поставити ручку регулятора швидкості R1в положення "мінімальна швидкість”(крайнє ліве положення) і ввімкнути автомат змінної напруги 380 В. Після цього, ввімкнути автоматQF1постійної напруги 220 В, при цьому одержить живлення обмотка збудженняОЗ навантажувального генератораGN.

Рис. 21.3. Двохтактний МП (диференціальна схема)

Рис. 21.4. Двохтактний МП (мостова схема)
Генератор G завантажимо змінним опоромRн і тим самим завантажимо двигунDD.
Ручку регулятора R1плавно зміщуємо вправо і встановлюємо частоту обертання 3000 об/хв. Завантажуємо двигун струмом від 2,6 до 5 А і для кожного значення струму якоря заносимо всі виміряні величини в таблицю 21.1.
Таблиця 21.1
Експериментальні дані
|
Uя |
В |
|
|
|
|
|
Ія |
А |
|
|
|
|
|
n |
об/хв |
|
|
|
|
|
М |
Н·м |
|
|
|
|
|
ізвор |
mA |
|
|
|
|
Аналогічний експеримент виконуємо з частотою обертання 1500 об/хв і всі вимірні величини заносимо також в таблицю 21.1.
Електромагнітний момент Мрозраховуємо за формулою
М=кФІя (21.3)
де к – конструктивна стала двигуна;
Ф – магнітний потік ,Вб;
кФ – визначається за допомогою паспортних даних досліджуваного двигуна з виразу:
 , (21.4)
, (21.4)
де
 .(21.5)
.(21.5)
Звідси кФ буде рівним:
 ,(21.6)
,(21.6)
Rякн– номінальний опір якірного кола
 ,(21.7)
,(21.7)
Uн ;Iн ;Pн– паспортні дані двигуна.
На основі експериментальних і розрахункових даних таблиці 21.1 будуємо характеристики n = f(Iя),ізв = f2(Iя)іn = f3(М).
Далі встановлюємо ручку регулятора R1 в положенняn= 3000 об/хв і розриваємо коло зворотного зв'язку в точці підключення амперметраА1. Завантажуємо двигун струмом якоря в границях 2 – 5 А і дані експерименту заносимо в таблицю 21.2.
Таблиця 21.2
Експериментальні дані
|
Uя |
В |
|
|
|
|
|
Ія |
А |
|
|
|
|
|
n |
об/хв |
|
|
|
|
|
М |
Н·м |
|
|
|
|
На основі експериментальних і розрахункових даних таблиці 6.2 будуємо характеристикиn = f(Iя), n = f(M).
Схема системи МПдвигун показана на рис. 21.6.
Ввімкнення магнітного підсилювача і двигуна в мережу виконується за допомогою автомата QF2.
Навантажувальний момент на валі дослідного двигуна DDстворюється навантажувальним генераторомGN, який працює в режимі динамічного гальмування. Величина навантажувального моменту змінюється опоромRн.
Амперметр А2 вимірює струм якірного кола двигуна, аА3 струм обмотки збудженняОЗ DD. Струм в обмотках(2W12W3) це струм зворотного зв’язку і вимірюється амперметромА1. Напруга якоря вимірюється вольтметромV1.Швидкість обертання двигуна вимірюється за допомогою тахогенератораTGі вольтметраV2. Схема працює наступним чином.
Змінний струм мережі випрямляється селеновим випрямлячем 1В1-1В6, зібраним по трифазній мостовій схемі і надходить в якір двигуна постійного струмуDD. Керування швидкістю обертання двигуна відбувається шляхом зміни по величині постійної напруги, яка подається на двигун. Для цього в кожне плече випрямляча ввімкнена одна із шести робочих обмоток дроселів які створюють магнітний підсилювач, також зібраний за трифазною мостовою схемою. На обмотках, відмічених на схемі індексом1W1-1W6, тратиться частина напруги живлення яка подається до випрямляча. Величина втрати напруги залежить від магнітного стану осердя дроселя. Якщо осердя дроселя підмагнічується постійним струмом, то індуктивність обмотокW1 зменшується втрата напруги на них також зменшується. Чим більше підмагнічується осердя, тим менша втрата напруги в обмоткахW1, тим більша напруга на виході випрямлячаB1 і тим більша частота обертання двигуна. Підмагнічення осердя магнітного підсилювача, відбувається постійною складовою струму навантаження, який проходить через обмоткиW1 і постійним струмом обмоток керування2W1–2W3. ОбмоткиW2являються обмотками наладки на задану швидкість обертання, одночасно, обмотками зворотного зв’язку.
На обмотки W2подається алгебраїчна сума трьох напруг. Одна з нихU3 задаюча напруга, другаUянапруга якоря двигуна, третяU4R – залежить від завантаження двигуна і знімається з опоруR4.
Напрямок намотки витків обмотки W2вибрано так, колиU3+ U4R>UЯ струм в обмоткахW2створює в осерді дроселів магнітний потік такого напрямку як магнітний потік, створений постійною складовою робочого струму в обмоткахW1.Внаслідок цього, якщо Uз + U4R>UЯ то втрата напруги на робочих обмотках дроселів зменшується, а збільшиться колиUз + U4R<UЯ .
Напруга на якорі і частота обертання двигуна, відповідно ростуть, коли Uз+ U4R>UЯ і зменшуються, колиUз + U4R<UЯ .
Задаюча напруга U3встановлюється вручну поворотом ручки потенціометраR1, який живиться від випрямлячаB2. Послідовно зR1 ввімкненні опори R1 іR2.ОпірR1 виконує функції наладки приводу (при виготовленні і ремонті) на нижню частоту обертання,R2під час наладки на верхню частоту обертання.
Напруга U4Rстворюється за допомогою трансформатора струмуТ2. Чим більший момент навантаження на валі двигуна, тим більший струм який проходить по обмотці трансформатораТ2і тим більша напругаU4R добавляється до задаючої напруги U3.
Ріст суми U3+ U4Rпризводить до росту напруги на якорі, а зменшення U3+ U4R до зниження напруги. Таким способом досягається стабілізація заданої частоти обертання в меншій залежності від навантаження. ВеличинаR4підбирається під час наладки приводу.
Процес автоматичного встановлення частоти обертання приводу носить коливний характер. Усталене значення процесів досягається через 0,2 – 2 с після порушення рівноваги.