

Шіллер микола миколайович
(1848-1910)
Зробив внесок у розвиток понять сили і маси. Розрізняв статичне і кінематичне тлумачення сили. Висунув ідею про можливість побудови механіки мас без явного використання поняття сили
§3. Закон збереження імпульсу
Сукупність матеріальних точок (тіл), які розглядаються як єдине ціле, називається механічною системою. Сили взаємодії між матеріальними точками механічної системи називаються внутрішніми. Сили, з якими на матеріальні точки системи діють зовнішні тіла називаються зовнішніми. Механічна система, в якій тіла взаємодіють між собою і на яку не діють зовнішні сили, називаєтьсязамкненою.
Розглянемо
механічну систему, яка складається із
nтіл, маси і швидкості
яких дорівнюють відповідно![]() ,
,![]() ,
...,
,
...,![]() і
і![]() ,
,![]() ,
...,
,
...,![]() .
Нехай
.
Нехай![]() ,
,![]() ,
...,
,
...,![]() - рівнодійні зовнішніх сил, що діють на
кожне з цих тіл, а
- рівнодійні зовнішніх сил, що діють на
кожне з цих тіл, а![]() -
внутрішня сила, яка діє наі-е тіло
з бокук-го.
-
внутрішня сила, яка діє наі-е тіло
з бокук-го.
На рис. 6 наведені рівнодійні зовнішніх сил і внутрішні сили, які діють між тілами механічної системи, що складається, наприклад, із трьох тіл. Запишемо другий закон Ньютона для кожного з nтіл механічної системи:
![]() ,
,
![]() ,
,
……………………………………………
![]() .
.
Додаючи почленно ці рівняння, знаходимо:
![]()
![]()
За третім законом Ньютона
![]() .
.
Тому
![]() і
і
![]() ,
,
де
![]() – імпульс системи, а
– імпульс системи, а![]() – головний вектор зовнішніх сил.
– головний вектор зовнішніх сил.
Отже, похідна за часом від імпульсу механічної системи дорівнює головному вектору зовнішніх сил, що діють на систему.
У випадку замкненої системи
![]() ,
,
тобто
![]() .
.
Цей вираз є законом збереження імпульсу: імпульс замкненої системи зберігається, тобто не змінюється із бігом часу.
Закон збереження імпульсу є наслідком однорідності простору, яка полягає в тому, що фізичні властивості і закони руху замкненої системи не залежать від вибору положення початку координат інерціальної системи відліку.
§4. Центр мас (інерції) механічної системи і закон його руху
Центром мас,
або центром інерції системи матеріальних
точок називається точкаC,
радіус-вектор![]() якої дорівнює
якої дорівнює
![]() ,
,
де
![]() -
загальна маса всієї системи,
-
загальна маса всієї системи,![]() – радіус-векторi-ї матеріальної
точки. Якщо радіус-вектори
– радіус-векторi-ї матеріальної
точки. Якщо радіус-вектори![]() проведені із центра масC, то
проведені із центра масC, то![]() .
.
Отже, центр мас - це геометрична точка, для якої сума добутків мас всіх матеріальних точок, що утворюють механічну систему, на їх радіус-вектори, які проведені з цієї точки, дорівнює нулю.
Швидкість центра мас
![]() .
.
Отже,
![]() ,
,
тобто імпульс системи дорівнює добутку величини маси системи на величину швидкості руху її центра мас.
Продиференціювавши це рівняння за часом, отримуємо:
![]() .
.
Центр мас механічної системи рухається як матеріальна точка, в якій зосереджено всю масу системи і на яку діє сила, що дорівнює головному вектору прикладених до системи зовнішніх сил.
§5. Робота сили та її вираз через криволінійний інтеграл
Н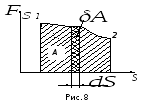
 ехай
тіло рухається прямолінійно і на всьому
переміщенні
ехай
тіло рухається прямолінійно і на всьому
переміщенні![]() на нього діє стала за величиною і
напрямком сила
на нього діє стала за величиною і
напрямком сила![]() ,
яка утворює кут
,
яка утворює кут![]() з напрямком переміщення. Дію сили
з напрямком переміщення. Дію сили![]() на переміщенні
на переміщенні![]() ,
характеризують величиною, яку називаютьроботою.
,
характеризують величиною, яку називаютьроботою.
Робота
![]() ,
яка виконана силою
,
яка виконана силою![]() ,
– це фізична величина, яка дорівнює
скалярному добутку сили на переміщення:
,
– це фізична величина, яка дорівнює
скалярному добутку сили на переміщення:
![]() ,
,
де
![]() – шлях пройдений тілом за час дії сили.
– шлях пройдений тілом за час дії сили.
У загальному
випадку сила може змінюватись як за
модулем, так і за напрямком. При цьому
сила
![]() може залежати як від координатx,
y, zточки прикладання сили, так і від
швидкості точки. Якщо розглянути
елементарне переміщення
може залежати як від координатx,
y, zточки прикладання сили, так і від
швидкості точки. Якщо розглянути
елементарне переміщення![]() ,
то силу
,
то силу![]() можна вважати сталою, а рух точки її
прикладання – прямолінійним.Елементарною
роботою
можна вважати сталою, а рух точки її
прикладання – прямолінійним.Елементарною
роботою![]() сили
сили![]() на переміщенні
на переміщенні![]() називається скалярна величина
називається скалярна величина
![]() ,
,
де
![]() - елементарний шлях, α – кут між векторами
- елементарний шлях, α – кут між векторами![]() і
і![]() ,
,![]() - проекція вектора
- проекція вектора ![]() на напрямок вектора
на напрямок вектора![]() (рис.7).
(рис.7).
Якщо вектори
![]() і
і![]() задані своїми декартовими координатами
так, що
задані своїми декартовими координатами
так, що
![]() ,
,
![]() ,
,
то елементарна робота
![]() ,
,
де
![]() ,
,![]() ,
,![]() - проекції сили на координатні осі;dx,dy, dz– зміни
координат радіус-вектора
- проекції сили на координатні осі;dx,dy, dz– зміни
координат радіус-вектора![]() при переміщенні
при переміщенні![]() .
.
Робота сили на ділянці траєкторії від точки 1до точки2дорівнює алгебраїчній сумі елементарних робіт на окремих нескінченно малих ділянках шляху:
![]() ,
,
де
![]() – проекція силиFна напрямок
переміщення.
– проекція силиFна напрямок
переміщення.
О триманий
інтеграл називається криволінійним
інтегралом, оскільки він представляє
інтеграл від функції
триманий
інтеграл називається криволінійним
інтегралом, оскільки він представляє
інтеграл від функції![]() вздовж деякої кривої, яка є траєкторією
руху. Часто траєкторію позначають
літероюL, тоді
вздовж деякої кривої, яка є траєкторією
руху. Часто траєкторію позначають
літероюL, тоді
![]() .
.
Таким чином робота
сили вздовж кривої Lдорівнює криволінійному інтегралу від
вектора![]() вздовж траєкторіїL.
вздовж траєкторіїL.
Нехай залежність
сили
![]() від шляхуSзображена
графічно (рис. 8). Тоді роботаAна шляху від точки1до точки2числово дорівнює площі фігури, яка
обмежена кривою
від шляхуSзображена
графічно (рис. 8). Тоді роботаAна шляху від точки1до точки2числово дорівнює площі фігури, яка
обмежена кривою![]() ,
ординатами, які проходять через точки
,
ординатами, які проходять через точки![]() і
і![]() та віссюS.
та віссюS.
Сила, що діє на тіло, не виконує роботу, якщо:
а) тіло перебуває у спокої (dS=0);
б) сила
перпендикулярна до напрямку переміщення
тіла
![]() .
.
Якщо
![]()
![]() ,
то робота сили додатна і силу
,
то робота сили додатна і силу![]() називають рушійною силою. Якщо кут
називають рушійною силою. Якщо кут![]() ≥
≥![]()
![]() ,
то робота сили від’ємна і силу
,
то робота сили від’ємна і силу![]() називають силою опору.
називають силою опору.
Якщо на тіло, яке
рухається поступально, одночасно діють
декілька сил, то робота рівнодійної
сили при переміщенні на
![]() дорівнює алгебраїчній сумі робіт
складових сил:
дорівнює алгебраїчній сумі робіт
складових сил:
![]() .
.
Сила
![]() ,
що діє на матеріальну точку або на тіло,
яке рухається поступально, називаєтьсяконсервативною або потенціальною,
якщо робота
,
що діє на матеріальну точку або на тіло,
яке рухається поступально, називаєтьсяконсервативною або потенціальною,
якщо робота![]() ,
яка виконується цією силою при переміщенні
точки (тіла) з одного довільного положення1 в інше2, не залежить від того,
вздовж якої траєкторії відбулось це
переміщення (рис. 9):
,
яка виконується цією силою при переміщенні
точки (тіла) з одного довільного положення1 в інше2, не залежить від того,
вздовж якої траєкторії відбулось це
переміщення (рис. 9):
![]() .
.
Зміна напрямку
руху вздовж траєкторії на протилежний
спричинює зміну знака роботи (кут замінюється на![]() іcosзмінює свій знак). Тому робота
консервативної сили при переміщенні
матеріальної точки вздовж замкненої
траєкторіїL(1-а-2-b-1)
тотожно дорівнює нулю:
іcosзмінює свій знак). Тому робота
консервативної сили при переміщенні
матеріальної точки вздовж замкненої
траєкторіїL(1-а-2-b-1)
тотожно дорівнює нулю:
![]() .
.
Прикладами консервативних сил можуть бути сили тяжіння, гравітаційні сили, сили пружності, сили електростатичної взаємодії між зарядженими тілами.