

Фізичні основи механіки
I. Фізичні основи механіки §1. Швидкість і прискорення
Матеріальна точка, рухаючись, описує деяку лінію в просторі. Ця лінія називається траєкторією. Залежно від форми траєкторії рух може бути прямолінійним або криволінійним.
Розглянемо рух матеріальної точки вздовж довільної криволінійної траєкторії (рис. 1)
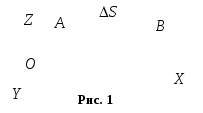
Положення точки,
що рухається вздовж траєкторії будемо
задавати радіус-вектором
![]() ,
який проведений в цю точку з точкиО,
яка прийнята за початок координат.
Оскільки декартові координати точки
x, y,іzчислово збігаються
з проекціями вектора
,
який проведений в цю точку з точкиО,
яка прийнята за початок координат.
Оскільки декартові координати точки
x, y,іzчислово збігаються
з проекціями вектора![]() на осі координат, то має місце розкладання:
на осі координат, то має місце розкладання:
![]() ,
,
де
![]() ,
,![]() ,
,![]() – одиничні вектори (орти) вздовж додатних
напрямків осейOX, OY, OZ відповідно.
Довжина кожного з ортів дорівнює
– одиничні вектори (орти) вздовж додатних
напрямків осейOX, OY, OZ відповідно.
Довжина кожного з ортів дорівнює
![]() .
.
Нехай матеріальна
точка в момент часу t
знаходиться в положенніАз радіус-вектором![]() .
Через проміжок часу
.
Через проміжок часу![]() точка переміститься в положенняВз радіус-вектором
точка переміститься в положенняВз радіус-вектором![]() .
.
Довжина ділянки траєкторії АВ, яка пройдена точкою з моменту початку відліку часу, називаєтьсядовжиною шляху S. Довжина шляху, пройденого матеріальною точкою, є скалярною функцією часуS=S(t).
Вектор
![]() ,
проведений з початкового положення
рухомої точки в положення її в даний
момент часу, називаєтьсявектором
переміщення.
,
проведений з початкового положення
рухомої точки в положення її в даний
момент часу, називаєтьсявектором
переміщення.
Щоб охарактеризувати рух матеріальної точки, вводять векторну фізичну величину – швидкість, яка характеризує не тільки швидкість руху частинки вздовж траєкторії, але й напрямок в якому рухається частинка в кожний момент часу.
Нехай матеріальна точка рухається по якійсь криволінійній траєкторії (рис. 2).
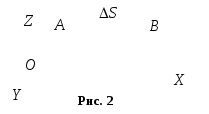
Вектором середньої
швидкості
![]() руху точки в інтервалі часу відt
до
руху точки в інтервалі часу відt
до
![]() називається відношення
приросту
називається відношення
приросту![]() радіус-вектора точки за цей інтервал
часу до його величини
радіус-вектора точки за цей інтервал
часу до його величини![]() :
:
![]() .
.
Вектор
![]() напрямлений так само як
напрямлений так само як![]() ,
тобто вздовж хордиАВ.
,
тобто вздовж хордиАВ.
Якщо у виразі для
![]() перейти до границі при
перейти до границі при![]() ,
то отримаємо вираз для миттєвої швидкості
,
то отримаємо вираз для миттєвої швидкості![]() рухомої матеріальної точки в момент
проходження її через положенняАтраєкторії:
рухомої матеріальної точки в момент
проходження її через положенняАтраєкторії:
![]() .
.
Миттєва
швидкість
![]() - векторна величина, яка дорівнює першій
похідній радіус-вектора рухомої точки
за часом.
- векторна величина, яка дорівнює першій
похідній радіус-вектора рухомої точки
за часом.
Вектор швидкості
![]() напрямлений вздовж дотичної до траєкторії
в сторону руху.
напрямлений вздовж дотичної до траєкторії
в сторону руху.
Продиференціюємо
за часом вираз для радіус-вектора
![]() ,
враховуючи, що
,
враховуючи, що![]() ,
,![]() ,
,![]() – сталі вектори. У результаті отримаємо
вираз
– сталі вектори. У результаті отримаємо
вираз
![]() .
.
Швидкість можна також подати у вигляді:
![]() ,
,
де
![]() ,
,![]() ,
,![]() - проекції швидкості на координатні
осі. Порівнюючи ці два вирази для
- проекції швидкості на координатні
осі. Порівнюючи ці два вирази для![]() ,
отримаємо:
,
отримаємо:
![]() ,
,
![]() ,
,
![]() .
.
Таким чином, проекції швидкості дорівнюють похідним відповідних координат за часом.
Модуль швидкості можна обчислити через проекції швидкості:
![]() .
.
Числове значення
миттєвої швидкості дорівнює першій
похідній за часом від
![]() :
:
![]() .
.
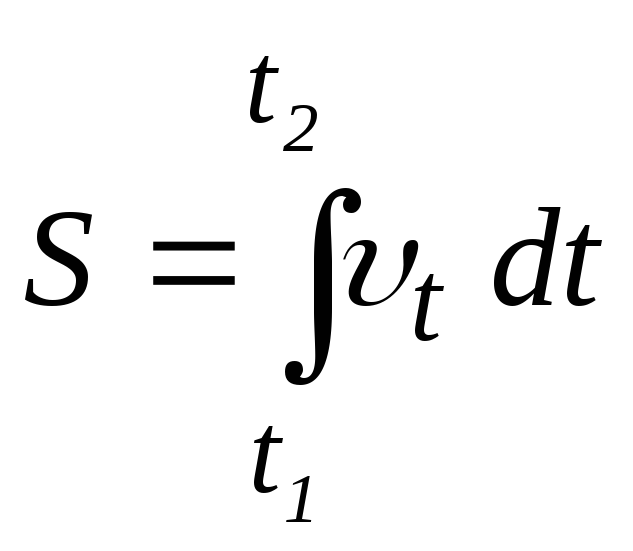
Якщо вираз
![]() проінтегрувати за часом в межах відtдо
проінтегрувати за часом в межах відtдо![]() ,
то отримаємо довжину шляху, який
пройдений точкою за час
,
то отримаємо довжину шляху, який
пройдений точкою за час![]() :
:
![]() .
.
Довжина шляху, який пройдений точкою за проміжок часу від t1 до t2,
 .
.
У випадку нерівномірного руху числове значення миттєвої швидкості стале і
![]() .
.
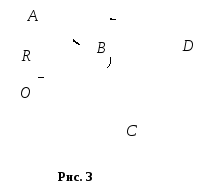
У випадку нерівномірного руху вектор швидкості змінюється і за величиною і за напрямком. Для характеристики зміни швидкості введемо поняття прискорення.
Нехай точка в
положенні Ав момент часуtмає швидкість![]() .
За часtрухома точка перейде в положенняВі набуде швидкості
.
За часtрухома точка перейде в положенняВі набуде швидкості![]() (рис. 3), яка відмінна від
(рис. 3), яка відмінна від![]() як за модулем, так і за напрямком і
як за модулем, так і за напрямком і![]() .
Перенесемо вектор
.
Перенесемо вектор![]() в точкуВі знайдемо
в точкуВі знайдемо![]() .
.
Середнім
прискоренням нерівномірного
руху в інтервалі часу від t
до t+t
називається вектор
![]() ,
який дорівнює відношенню приросту
,
який дорівнює відношенню приросту![]() вектора швидкості точки до проміжку
часу t:
вектора швидкості точки до проміжку
часу t:
![]() .
.
Вектор
![]() збігається за напрямком з вектором
зміни швидкості
збігається за напрямком з вектором
зміни швидкості![]() .
.
Миттєвим
прискоренням точки в момент часу
t називають
векторну величину
![]() ,
яка дорівнює границі середнього
прискорення, якщо
,
яка дорівнює границі середнього
прискорення, якщо![]() :
:
![]() .
.
Прискорення точки
дорівнює першій похідній від її швидкості
![]() за часом.
за часом.
Диференціюючи за часом співвідношення
![]() ,
,
отримаємо для прискорення вираз:
![]() .
.
Це саме прискорення можна виразити через його проекції на координатні осі:
![]() .
.
Порівнюючи ці два вирази для прискорення, випливає, що
![]() ,
,
![]() ,
,![]()
Таким чином, проекції прискорення дорівнюють другим похідним за часом від відповідних координат.
Розкладемо вектор
зміни швидкості
![]() на дві складові:
на дві складові:![]() і
і![]() так, щобВС=ВD=
так, щобВС=ВD=![]() .
Складова
.
Складова![]() визначає зміну швидкості лише за
величиною: якщо рух рівномірний, то
визначає зміну швидкості лише за
величиною: якщо рух рівномірний, то![]() і
і![]() .
Інша складова
.
Інша складова![]() існує і при рівномірному русі, очевидно,
існує і при рівномірному русі, очевидно,![]() в тому випадку, якщо рух тіла прямолінійний.
Якщо кут
в тому випадку, якщо рух тіла прямолінійний.
Якщо кут![]() ,
то
,
то![]() і вектор
і вектор![]() стає перпендикулярним вектору швидкості
стає перпендикулярним вектору швидкості![]() .
Таким чином, вектор прискорення можна
зобразити у вигляді суми двох взаємно
перпендикулярних векторів:
.
Таким чином, вектор прискорення можна
зобразити у вигляді суми двох взаємно
перпендикулярних векторів:
![]()
![]()
Величина
![]() називаєтьсятангенціальним
прискоренням, яке характеризує
зміну швидкості лише за величиною і
напрямлене вздовж дотичної до траєкторії.
Числове значення вектора
називаєтьсятангенціальним
прискоренням, яке характеризує
зміну швидкості лише за величиною і
напрямлене вздовж дотичної до траєкторії.
Числове значення вектора![]() дорівнює:
дорівнює:
![]() .
.
Величина
![]() називається векторомнормального
прискоренняі характеризує зміну
швидкості лише за напрямком. Це
прискорення завжди перпендикулярне
до напрямку швидкості. Для його обчислення
припустимо, що точкаВдосить близька
до точкиА, тому
називається векторомнормального
прискоренняі характеризує зміну
швидкості лише за напрямком. Це
прискорення завжди перпендикулярне
до напрямку швидкості. Для його обчислення
припустимо, що точкаВдосить близька
до точкиА, тому![]() можна вважати дугою кола радіусомR,
при цьому за величиною ця дуга мало
відрізняється від хордиАВ. З
подібності трикутниківОАВіBDC
отримаємо:
можна вважати дугою кола радіусомR,
при цьому за величиною ця дуга мало
відрізняється від хордиАВ. З
подібності трикутниківОАВіBDC
отримаємо:
![]() і
і
![]() .
.
Таким чином
![]() .
.
Отже, повне
прискорення
![]() матеріальної точки дорівнює векторній
сумі її тангенціального і нормального
прискорень (рис. 4):
матеріальної точки дорівнює векторній
сумі її тангенціального і нормального
прискорень (рис. 4):
![]() .
.
Модуль прискорення точки
![]() .
.
Напрямок повного
прискорення визначається кутом
![]() між векторами
між векторами![]() і
і![]() .
З рис. 4 видно, що:
.
З рис. 4 видно, що:
![]() .
.
Розглянемо рівнозмінний прямолінійний поступальний рух тіла вздовж осі ОХ.
Оскільки
![]() ,
,
то
 і
і
![]() .
.
Враховуючи,
що
![]() ,
отримуємо:
,
отримуємо:
 .
.
В результаті залежність від часу координати хбудь-якої точки має вигляд:
![]() .
.
Тут
![]() і
і![]() - значенняхі
- значенняхі![]() в момент часуt=0.
в момент часуt=0.