

Лекция 9. Преобразование декартовых прямоугольных координат на плоскости и в пространстве
П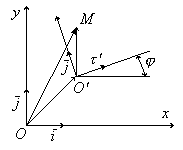 усть
на плоскости заданы две произвольные
декартовы прямоугольные системы
координат. Первая определяется началом
О и базисными векторамиi
j
, вторая – центром О’
и базисными векторами i’
j’.
усть
на плоскости заданы две произвольные
декартовы прямоугольные системы
координат. Первая определяется началом
О и базисными векторамиi
j
, вторая – центром О’
и базисными векторами i’
j’.
Поставим цель выразить координаты x y некоторой точки М относительно первой системы координат через x’ и y’ – координаты той же точки относительно второй системы.
Заметим, что
Обозначим координаты точки О’ относительно первой системы через a и b:
![]()
Разложим векторы i’ и j’ по базису i j:
![]() (*)
(*)
Кроме
того, имеем:
![]() .
Введем сюда разложения векторов по
базисуi’
j’:
.
Введем сюда разложения векторов по
базисуi’
j’:
![]()
отсюда
![]()
Можно сделать вывод: каковы бы ни были две произвольных декартовы системы на плоскости, координаты любой точки плоскости относительно первой системы являются линейными функциями координат той же точки относительно второй системы.
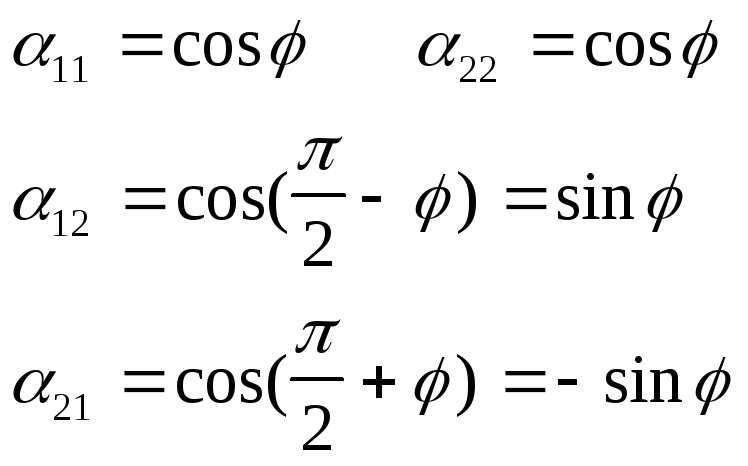
Умножим скалярно уравнения (*) сначала на i, затем на j:
 (**)
(**)
О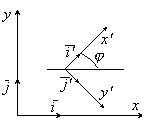 бозначим
через
угол между векторами i
и i’.
Система координат i
j
может быть совмещена с системой i’j’
путем параллельного переноса и
последующего поворота на угол .
Но здесь возможен и дугой вариант: угол
между базисными векторами i
i’
также ,
а угол между базисными векторами j’j’
равен
- .
Эти системы нельзя совместить параллельным
переносом и поворотом. Необходимо еще
и изменить направление оси
у на
противоположное.
бозначим
через
угол между векторами i
и i’.
Система координат i
j
может быть совмещена с системой i’j’
путем параллельного переноса и
последующего поворота на угол .
Но здесь возможен и дугой вариант: угол
между базисными векторами i
i’
также ,
а угол между базисными векторами j’j’
равен
- .
Эти системы нельзя совместить параллельным
переносом и поворотом. Необходимо еще
и изменить направление оси
у на
противоположное.
Из формулы (**) получаем в первом случае:
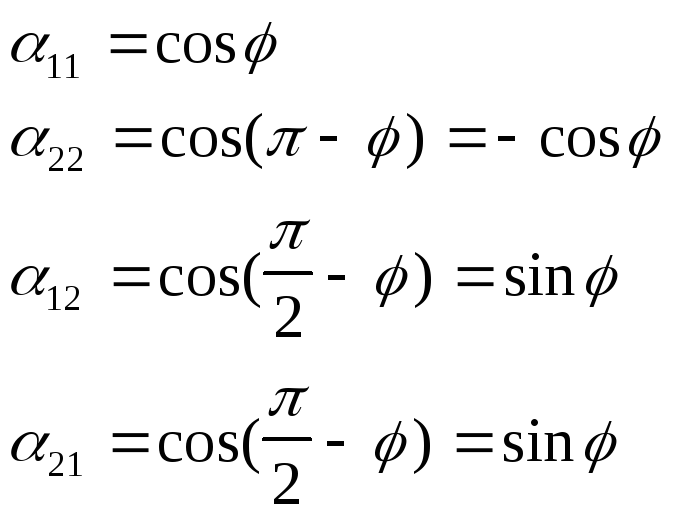
Во втором случае
Формулы преобразования имеют вид:
Второй случай мы рассматривать не будем. Условимся считать обе системы правыми.
Т.е. вывод: каковы бы ни были две правые системы координат, первая из них может быть совмещена со второй путем параллельного переноса и последующего поворота вокруг начала на некоторый угол .
Формулы
параллельного переноса:
![]()
Формулы
поворота осей:
Обратные преобразования:

Преобразование декартовых прямоугольных координат в пространстве.
В пространстве, рассуждая аналогичным образом, можно записать:
![]()
![]()
 (***)
(***)
И для координат получить:
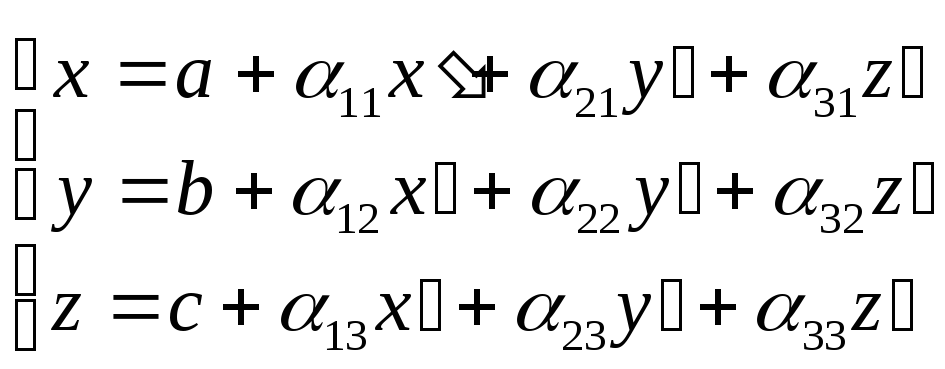 (****)
(****)
Итак, каковы бы ни были две произвольные системы координат в пространстве, координаты x y z некоторой точки относительно первой системы являются линейными функциями координат x’ y’ z’ этой же точки относительно второй системы координат.
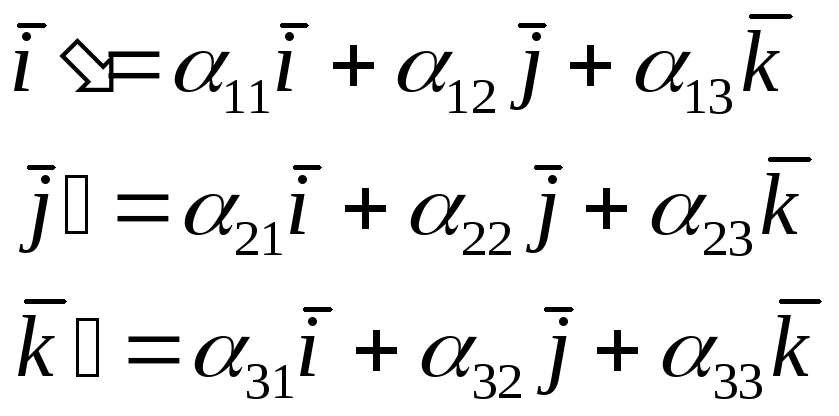
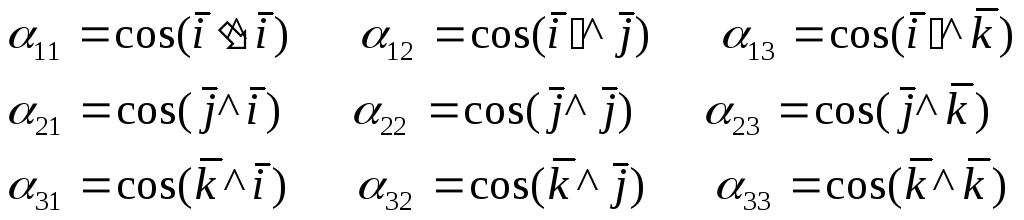
Умножая каждое из равенств (***) скалярно на i’ j’ k’ получаем:
В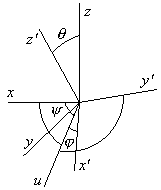 ыясним
геометрический смысл формул преобразования
(****). Для этого предположим, что обе
системы имеют общее начало:a
= b
= c
= 0.
ыясним
геометрический смысл формул преобразования
(****). Для этого предположим, что обе
системы имеют общее начало:a
= b
= c
= 0.
Введем в рассмотрение три угла, полностью характеризующих расположение осей второй системы относительно первой.
Первый угол – образован осью х и осью u, являющейся пересечением плоскостей xOy и x’Oy’. Направление угла – кратчайший поворот от оси x к y. Обозначим угол через . Второй угол – это не превосходящий угол между осями Oz и Oz’. Наконец, третий угол – это угол между осью u и Ox’, отсчитываемый от оси u в направлении кратчайшего поворота от Ox’ к Oy’. Эти углы называются углами Эйлера.
Преобразование первой системы во вторую можно представить в виде последовательного проведения трех поворотов: на угол относительно оси Oz; на угол относительно оси Ox’; и на угол относительно оси Oz’.
Числа ij можно выразить через углы Эйлера. Эти формулы мы записывать не будем из-за громоздкости.
Само преобразование представляет собой суперпозицию параллельного переноса и трех проводимых последовательных поворотов на углы Эйлера.
Все эти рассуждения можно провести и для случая, когда обе системы левые, или разной ориентации.
Если имеем две произвольные системы, то, вообще говоря, можно их совместить путем параллельного переноса и одного поворота в пространстве вокруг некоторой оси. Искать ее не будем.