

Динамічні характеристики обертального руху.
а) Поняття моменту сили.
Досліди та спостереження показують, що механічний стан рівноваги або стан руху тіла може змінити лише така сила, лінія дії якої не проходить через точку його закріплення або вісь обертання.
Для кількісної оцінки взаємного впливу сили і розміщення її лінії дії відносно осі обертання на зміну механічного стану тіла і вводиться фізична векторна величина – момент сили.
Момент
сили
– фізична векторна величина, що
характеризує обертальну здатність сили
і визначається векторним добутком
радіус-вектора точки на вектор сили:
![]() ;
;
![]() ,
(2-16)
,
(2-16)
де
![]() – плече сили.
– плече сили.
Плече сили – найкоротша відстань від осі обертання до лінії дії сили.
(Момент від лат. “movimentum” – рушійна здатність).
З
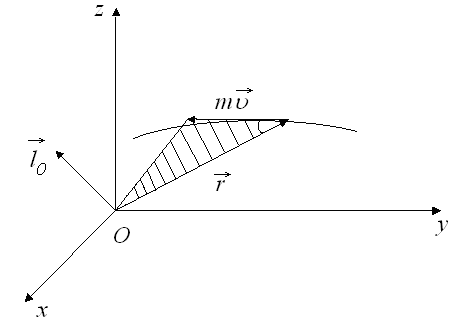
мал. 3.7. видно, що
![]()
|
|
|
Рис. 2.7. |
а) Модуль моменту сили дорівнює подвійній площі трикутника побудованого на векторах сили і радіус-вектора.
б)
Напрям вектора
![]() визначається за правилом векторного
добутку: вектор
визначається за правилом векторного
добутку: вектор![]() направлений
направлений![]() до площини, що визначається векторами
до площини, що визначається векторами![]() і
і![]() так, що якщо дивитись з його кінця на цю
площину, то діюча сила буде намагатись
повернути тіло навколо т.О
проти годинникової стрілки.
так, що якщо дивитись з його кінця на цю
площину, то діюча сила буде намагатись
повернути тіло навколо т.О
проти годинникової стрілки.
б) Поняття моменту імпульсу точки. У випадку обертального руху матеріальної точки вводиться фізична величина – момент імпульсу, що вважається кількісною мірою обертальної частини руху.
Момент імпульсу матеріальної точки відносно довільного центру визначається векторним добутком радіус-вектора точки на її імпульс:
![]() (2-17)
(2-17)
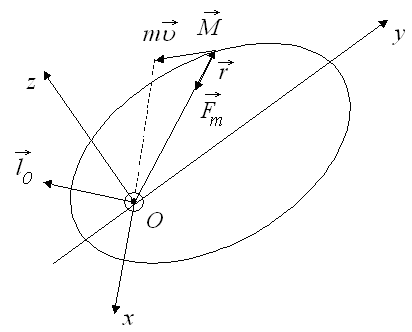
Момент імпульсу характеризує не тільки модуль і напрям імпульсу, але і положення точки відносно даного центра т.О (рис. 2.8).
Момент імпульсу називається кінетичним моментом точки.
Модуль
і напрям
![]() визначається аналогічно вектору моменту
сили
визначається аналогічно вектору моменту
сили![]() .
.
![]() ,
,
де
![]() .
.
![]()
|
|
|
Рис. 2.8. |
Закон збереження моменту імпульсу точки при русі під дією центральної сили.
Нехай матеріальна точка рухається під дією сили, лінія дії якої весь час проходить через одну і ту ж нерухому точку О (рис. 2.9). Така сила називається центральною. Приклади центральних сил: сила тяжіння (гравітаційна сила), сила пружності – тобто консервативні сили – центральні сили.
|
|
|
Рис. 2.9. |
Тоді:
![]()
Приклад руху точки під дією центральних сил орбітальний рух штучних супутників Землі.
Знайдемо похідну за часом:
 ,
,
де
 ;
;
Так,
як
![]() – центральна сила, то
– центральна сила, то![]() ;
;![]() .
Тоді:
.
Тоді:
![]() (2-18)
(2-18)
Момент імпульсу точки, що рухається під дією центральної сили зберігається в процесі її руху.
Практичне заняття 2.1 Тема: Закони Ньютона. Основні формули
Другий закон Ньютона для матеріальної точки постійної маси
![]()
де Σ – рівнодійна|рівнодійний| всіх сил, прикладених до тіла, m і а – його маса і прискорення.
Закон тертя ковзання: сила тертя ковзання пропорційна|пропорціональний| силі нормального тиску|тиснення| між поверхнями тіл, що труться
![]() ,
,
де µ – коефіцієнт| тертя ковзання, який залежить від властивостей поверхонь.
Методичні рекомендації
Для вирішення задач|задача| динаміки складається рівняння руху матеріальної точки|точка|, що виражає|виказувати,висловлювати| другий закон Ньютона. При цьому рекомендується наступний|слідуючий| порядок|лад| дій:
а) зробити креслення і на ньому зобразити|змалювати| всі сили, що діють на дане тіло.
Вираз|вираження| «на тіло діє сила» завжди означає, що дане тіло взаємодіє з|із| іншим тілом, внаслідок чого набуває|придбавати| прискорення. Отже, до даного тіла завжди прикладено стільки сил, скільки є|наявний| інших тіл, з|із| якими воно взаємодіє.
Щоб правильно визначити напрям|направлення| сил, що діють на тіло, треба пам’ятати, що сила тяжіння направлена|спрямований| вниз по вертикалі, сила реакції опори за відсутності тертя – по нормалі до дотичних поверхонь в точці їх дотику у бік тіла, сила натягу нитки – уздовж|вздовж,уподовж| нитки у бік точки підвісу;
б) записати другий закон Ньютона у векторній формі;
в) якщо сили діють не по одній прямій, то вибирають дві взаємно перпендикулярні осі (два напрями|направлення|) х і у|в,біля|, які лежать у площині|плоскість| дії сил. Спроектувавши всі вектори, що входять в рівняння на ці осі, записують|занотовувати| другий закон у вигляді двох скалярних рівнянь:
![]() ;
;
![]() (1)
(1)
У
разі|в
разі|
прямолінійного руху одну з осей (х)
направляють|спрямовувати,скеровувати|
уздовж|вздовж,уподовж|
прискорення а,
а іншу (у)
–
перпендикулярно вектору а.
Тоді
![]() ;
;
![]() і рівняння
(1) спрощуються:
і рівняння
(1) спрощуються:
![]() ,
,
![]() (2)
(2)
У більш загальному випадку криволінійного руху одну вісь направляють|спрямовувати,скеровувати| уздовж|вздовж,уподовж| тангенціального прискорення а (тобто по дотичній до кривої), іншу – уздовж|вздовж,уподовж| нормального прискорення аn.
Якщо всі сили, що діють на тіло, лежать на одній прямій і, отже, уздовж|вздовж,уподовж| цієї прямої направлений|спрямований| вектор а, то, вибравши її за вісь проекцій і направивши|спрямувавши,скерувавши| у бік вектора а, відразу записують|занотовувати| другий закон в скалярній формі:
![]() (3)
(3)
де
![]() –
сума проекцій сил, що діють на тіло.
–
сума проекцій сил, що діють на тіло.
2. Якщо в задачі|задача| розглядається|розглядується| рух системи зв’язаних між собою тіл, то рівняння руху записують|занотовувати| для кожного тіла окремо|нарізно|. Крім того, записують|занотовувати| рівняння, що виражають|виказувати,висловлювати| так звані кінематичні умови, що зв’язують прискорення окремих тіл системи (наприклад, рівність по модулю прискорень двох вантажів|тягар|, що висять на нерозтяжній нитці, перекинутій через блок). Таким чином, отримують|одержувати| систему рівняннь, число яких рівне числу невідомих.
Якщо тіла зв’язані ниткою, масою якої можна нехтувати, то силу натягу нитки вважають|лічити| однаковою по всій її довжині. Дійсно, припустивши|передбачивши|, що на ділянку нитки довжиною А діють з боку сусідніх частин|частка| сили Т1, Т2, запишемо по другому закону Ньютона
![]()
де m – маса даної ділянки нитки. Вважаючи|гадаючи| m = 0, отримаємо|одержимо| Т1 = Т2. Якщо нитка перекинута через блок, то рівність Т1 = Т2 виконується тільки|лише| у тому випадку, коли можна нехтувати масами нитки і блоку, а також силами тертя, що виникають при обертанні блоку.
3.Рух тіл при наявності сил тертя|.
|
|
|
Рис. 1. |
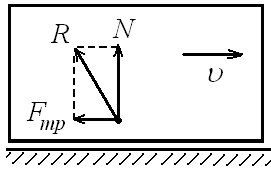
б) Сила тертя ковзання підкоряється закону тертя ковзання і направлена|спрямований| завжди у бік, протилежний відносній швидкості тіла. Поява сили тертя не може змінити|зрадити| напрям|направлення| відносної| швидкості тіла: у крайньому випадку|у крайньому разі| під дією сили тертя ковзання| зникне. Цією обставиною користуються в тих задачах|задача|, де наперед|заздалегідь| невідомий напрям|направлення| руху тіла .
в)
Сила тертя спокою Fсп
завжди рівна за
модулем
і протилежна за
напрямком|направлення|
тій силі, яка повинна була б
викликати|спричинити|
ковзання. Тому сила Fсп
є величина
змінна навіть при постійному значенні
сили N.
Проте|однак|
вона має межу –
величину
![]() ,яка
визначається
за законом
тертя спокою:
,яка
визначається
за законом
тертя спокою:
![]() ,
де µ0
–
коефіцієнт тертя спокою. Вирішуючи
задачі, ми наближено
вважатимемо|лічити|
µ0
= µ,
тобто вважатимемо|гадати|
максимальне значення сили тертя спокою
рівне
силі тертя ковзання.
,
де µ0
–
коефіцієнт тертя спокою. Вирішуючи
задачі, ми наближено
вважатимемо|лічити|
µ0
= µ,
тобто вважатимемо|гадати|
максимальне значення сили тертя спокою
рівне
силі тертя ковзання.