

4.1 Решение задач кинематики
Для решения задач кинематики необходимо составить расчетную кинематическую модель манипулятора, в основу которой положены имеющиеся геометрические размеры звеньев, а также типы, количество и распределение кинематических пар.
Положение кинематической цепи в пространстве будем определять с помощью обобщенных координат qi (i=l, 2, ..., п), характеризующих относительные перемещения в кинематических парах. Для определения положения рабочего органа в пространстве введем координатыrj (j=1, 2,..., n), гдеm£6.
4.1.1 Прямая задача о положении. Прямую задачу о положении используют при исследовании кинематики и динамики манипуляторов [16].
При решении этой задачи рассчитывают положение рабочего органа, а такжезвеньев манипулятора по заданным обобщенным координатам qi (i=l, 2, ...,n) в кинематических парах.
Если рассчитывают положение рабочего органа, rj (j=1,2, ...,m), то определяют, соответственно, либо координаты схватаrj (j=1,2, ...,m),либо конечное число наборов координат схвата, либо законы изменения координат схвата во времениri = rj(t) (j=1,2,…m). В общем случае приm=6 в результате расчета координат схвата, как функций времени можно определить уравнение траектории схвата в параметрической (в зависимости от времени) или явной формеи ориентацию схвата вдоль всей траектории.
С помощью прямой задачи можно определить [19]:
геометрические характеристики рабочего пространства и рабочей зоны манипуляторов со сложной кинематической схемой координаты типа
точностные характеристики, например погрешности Drj, (j = 1, 2, ....т) определения координат схватаобусловленные неточным изготовлением элементов манипулятора, либо ошибками Dqi (i=l, 2, ..., п) отработки относительных перемещений qi (i=l, 2, ..., п) в кинематических парах;сервисные характеристики.
Кинематическая схема манипулятора приведена на рисунке 4.1
Робот имеет одно вращательное и два поступательных сочленения. Положение рабочего органа манипулятора определяется обобщенными координатами. Тогда решение прямой задачи заключается в нахождении координат точки Р манипулятора в декартовой системе координатOXYZ.
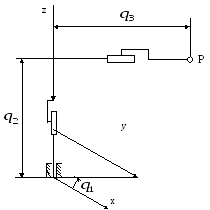
Рисунок 4.1 Кинематическая схема манипулятора
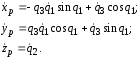
Решение прямой задачи имеет вид:

Задача расчета линейных скоростей и ускорений, а также угловых скоростей и ускорений звеньев тесно связана с прямой задачей о положении манипулятора и также может иметь прямую и обратную постановку.
Решение прямой задачи о скоростях для данного манипулятора имеет вид:
4.1.2 Обратная задача о положении манипулятора. С помощью этой задачи определяют обобщенные координатыqi (i=l,2, ..., п) манипулятора по заданному в опорной системе координат положению рабочего органа или некоторого звена манипулятора. В частности, если по заданным координатам схвата rj (j=1, 2,...,т), удается определить обобщенные координаты манипулятора, то координаты других звеньев манипулятора находят на следующем этапе путем решения прямой задачи.
Для данного робота обратную задачу можно решить аналитически. Решение имеет вид:
 (4.1)
(4.1)