

3.4 Датчики обратных связей промышленного робота
Манипуляционный робот с выбранной кинематической схемой имеет три сочленения. Каждое сочленение оснащено двигателем, на который поступает управляющее воздействие от системы управления. Каждое сочленение оснащено двумя датчиками: датчиком положения и датчиком скорости.
Схема автоматизации промышленного робота приведена на рисунке 3.5
Вся информация с датчиков обратной связи заводится в микроЭВМ. Аналоговая часть включает в себя входной усилитель, преобразователь, датчики тока и напряжения, и исполнительный элемент, состоящий из двигателя и редуктора с расположенными на нем датчиками положения и скорости (ДП) и (ДС). Датчики положения и скорости позволяют обеспечить обратную связь для коррекции расчетных управляющих воздействий.
Сигналы с датчика положения, датчика скорости, напряжение и ток на якорной обмотке электродвигателя поступают в вычислительно-логический блок, после соответствующей обработки в модуле ввода-вывода дискретной части системы, в соответствии с принятой информационной кодировкой. Вся обработка информации принятых с датчиков происходит в микроЭВМ, после чего выдается управляющее воздействие на входной усилитель исполнительной системы.
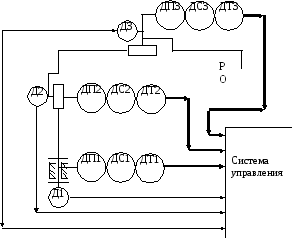
Рисунок 3.5 Схема автоматизации промышленного робота
ДП – датчик положения, ДС – датчик скорости, ДС – датчик тока Д – двигатель, РО – рабочий орган.
При выборе датчиков положения учитывают такие факторы, как наличие тех или иных источников питания, значение потребляемой мощности, диапазон измеряемой величины, уровень шума, точность. Точность датчика должна быть не ниже точности, предъявляемой к системе [16].
На роботе для измерения положения используются цифровые датчики. Эти датчики выдают информацию о перемещении. Они могут работать в абсолютном режиме и по приращениям, как генераторы импульсов. В обоих случаях измеряемое перемещение разлагается на кванты, значение которых определяется разрешающей способностью датчика. Абсолютные датчики выдают в каждый момент времени полную информацию об измеряемом перемещении. Ели требуется высокая разрешающая способность, то измерительная система робота, построенная на основе таких датчиков, может оказаться громоздкой и очень дорогой. Поэтому в роботе применяются инкрементальные датчики, работающие по приращениям. По техническому исполнению они проще абсолютных датчиков. Так, инкрементальный датчик фотоэлектрического типа, измеряющий углы поворота, состоит из диска с равномерно расположенными отверстиями и простейшего считывающего устройства. Однако измерительная система такого датчика должна содержать счетчик и накопитель. Общее число импульсов определяет мгновенное значение положения объекта. Разрешающая способность таких датчиков может достигать нескольких тысяч импульсов на один оборот.
В качестве датчиков скорости используются тахогенераторы.
По принципу действия и конструктивному исполнению они являются обычными электрическими машинами постоянного тока, работающими в генераторном режиме. Выходное напряжение тахогенератора пропорционально измеряемой угловой скорости при большом сопротивлении нагрузки [16].
Датчики тока используются для определения момента на валу двигателя, поскольку величина момента на валу двигателя прямопропорционально связана с величиной силы тока в цепи якоря.
4 Построение и исследование математической модели робота как объекта управления