

7.2.3 Trace mode 6 - синтез новых технологий
Новая версия программы по своему инновационному характеру превосходит все существующие версии программы. В ней предложен совершенно новый подход к разработке систем управления, наглядный и интуитивно понятный специалистам разной профессиональной подготовки: инженерам по АСУ ТП, программистам, технологам и даже экономистам. Новая версия программы будет давать интегрированный инструмент для программирования контроллеров (Softlogic), разработки операторского интерфейса (SCADA), управления производственными заданиями (MES) и основными фондами (EAM). TRACE MODE 6 станет многоплатформной – Windows, UNIX, LINUX, QNX. При этом сохранится полная совместимость TRACE MODE 6 с TRACE MODE 5.
7.3 Графическое отображение состояния производственных процессов
В соответствии с техническим заданием в ходе выполнения дипломного проекта мною на базе SACDAсистемыTRACEMODEбыла разработана программа графического отображения состояния производственных процессов.
7.3.1 Назначение программы
Основные функции программы графического отображения:
Получение информации о технологическом процессе с сервера производственного контроля;
Отображение состояния технологического процесса в реальном времени в виде мнемосхем, карт объекта и т. п., содержащих произвольные графические и текстовые объекты, на которые может быть наложена анимация (масштабирование, изменение цвета, движение и т. п. в зависимости от состояния параметров тех. процесса);
Звуковое и визуальное (графическое) оповещение о событиях (нештатных ситуациях);
Передача команд оператора на исполнительные механизмы (управление);
Получение из базы данных информации об истории параметров технологического процесса (трендах) за произвольный период, обработка информации (усреднение, суммирование, сдвиг и т.п.), вывод в виде графиков (линейных, ступенчатых графиков расхода), таблиц;
Получение из базы данных информации о произошедших за произвольный период событиях, связанных с объектом или группой объектов, вывод информации в табличном виде;
Экспорт информации в другие приложения, печать.
Программа графического отображения может использоваться не только для контроля технологических процессов на производстве, но и для создания систем охранно-пожарной сигнализации, климат контроля помещений и т.п.
7.3.2 Требования к аппаратным и программным ресурсам
Минимальные требования к аппаратным ресурсам:
процессор PentiumII, 300 МГц;
память 64 Мб;
30 мегабайт свободного места на жестком диске для размещения программы.
Требования к программным ресурсам:
операционная система Windows /NT/2000/XPилиLinux, с использованием эмулятораwine;
установленные протоколы TCP/IP;
MYSQL сервер.
7.3.3 Схема работы и возможности программы графического отображения состояния производственных процессов
Структура информационных потоков, обрабатываемых программой графического отображения, изображена на рисунке 4.3. TRACEMODEосуществляет обмен данными сервером производственного контроля, сервером баз данных, с помощью которых ведутся базы данных производственного контроля.
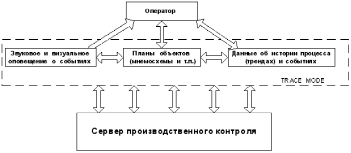
Рисунок 7.3 – Схема работы программы графического отображения
Программа графического отображения позволяет оператору получать информацию от элементов однопроводной сетей АСУ тепличного комбината о состоянии микроклимата в теплице. Состояние производственного процесса отображается в виде мнемосхем, на которых размещены планы объектов (теплицы), изображения приборов, установок, движущиеся агрегаты (смесительное устройство), шкалы (текущие значения контролируемых параметров).