

Матика 2 курс / Дифференциальные уравнения 2б
.pdf61
det A
Sp A
Рис. 3.12. Зависимость характера фазового портрета от свойств матрицы А
2). Из проведенных исследований следует, что линейные преобразования сохраняют качественное поведение решений и лю-
бая линейная система на плоскости, имеющая одну неподвижную точку, качественно эквивалентна одной из систем, фазовыми порт-
ретами которых являются: узел (устойчивый или неустойчивый);
вырожденный узел (устойчивый или неустойчивый); седло, фокус
(устойчивый или неустойчивый), центр. Тип фазового портрета определяется корнями характеристического уравнения матрицы си-
стемы А, которые в свою очередь определяются через Det А и Sp А.
Это позволяет определить тип фазового портрета и характер устой-
чивости точки (0,0) непосредственно по значению Sp А и Det А по диаграмме (рис. 3.12). Все фазовые портреты, соответствующие устойчивому положению равновесия точки (0, 0) находятся во вто-

62
ром квадранте: Sp A < 0; Det A > 0.
ЗАДАЧА 3.1. Запишите общее решение однородных уравне-
ний по таблице 3.1
а) d 2 x / dt 2 5dx / dt 6x 0 б) d 2 x / dt 2 2dx / dt x 0
в) d 2x / dt 2 6dx / dt 13x 0
ЗАДАЧА 3.2. Перепишите уравнение колебаний
d 2 x / dt 2 2 dx / dt 02 x 0
в виде эквивалентной ему системы. Запишите характеристическое уравнение и проанализируйте характер изменения фазового порт-
рета при изменении коэффициента трения γ:
а) 0, |
б) 0 0, |
в) 0 , |
г) 0 , |
ω0 - частота собственных колебаний системы. |
|
||
ПРИМЕЧАНИЕ. Если Det А = 0, то хотя бы одно из собственных значений 0. Тогда линейная система называется непростой. От-
сюда следует, что существует ненулевые решения системы
a11x1 a12x2 0 a21x1 a22x2 0,
и кроме начала координат система имеет другие неподвижные точ-
ки. Существует две возможности а) А = 0 (все точки неподвижны)
б) ранг матрицы А равен 1 (неподвижные точки образуют прямую проходящую через начало координат).
63
ПРИМЕР 3.6. Система
dx1 4x1 2x2 dt
dx2 2x1 x2 dt
|
4 |
2 |
0; |
|
5 |
|
|
|
|
A |
, |
2 |
|
|
|
||
имеет матрицу |
2 |
1 |
1 |
|
и множество не- |
|||
|
|
|
|
|
||||
подвижных точек на прямой x2 |
= 2x1. Из уравнения |
dx |
/ dx 1/ 2 |
|||||
|
|
|
|
|
|
|
2 |
1 |
находим уравнение фазовых траекторий:
x2 x1/ 2 C.
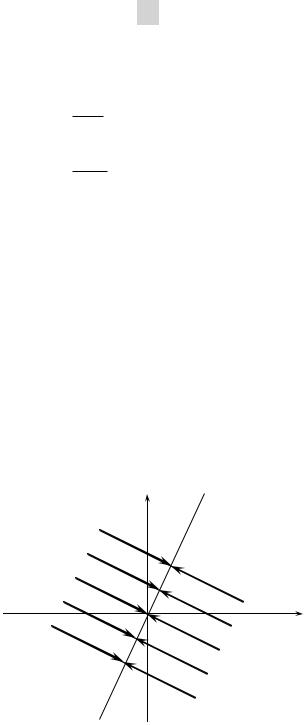
x2
x1
Рис. 3.13. Фазовый портрет системы 3.6, имеющей множество неподвижных точек

64
3.4. АЛГОРИТМ РЕШЕНИЯ ОДНОРОДНОЙ СИСТЕМЫ
Запись решения линейной однородной системы в матричной
форме удобно выполнить, используя матрицу e A t , которая называ-
ется матричной экспонентой:
e At E |
At |
|
( At) |
2 |
... |
( At)k |
... |
|
1! |
2! |
|
|
|||||
|
|
|
|
|
k ! |
|
||
Поскольку справедливо соотношение |
de A t / dt Ae At , пря- |
|||||||
мой подстановкой e A t в систему
dX |
AX |
(3.26) |
|
|
|||
dt |
|||
|
|||
|
|
убеждаемся, что X e At - решение.
x (t)
Обозначив X 1 - матрицу искомых функций, а
x2 (t)
X 0 |
x |
(t |
|
|
) |
|
|
1 |
|
0 |
|
- матрицу столбец начальных условий, получаем |
|||
|
x |
2 |
(t |
0 |
) |
|
|
|
|
|
|
|
|
||
решение системы (3.26) в компактном виде
X e A(t t0 ) X 0
или |
|
|
|
|
|
X eAt X |
0 |
при t0 0 . |
(3.27) |
|
|
|
|
|
Матрицу e A t |
будем находить согласно преобразованию по- |
|||
добия |
|
|
|
|

65
|
e At TeJ tT 1, |
(3.28) |
где матрицу e J t |
будем определять по собственным |
значениям |
матрицы А и виду матрицы J из табл. 3.2. |
|
|
ЗАМЕЧАНИЕ 1. Вид матрицы eJt легко получается непосред-
ственной подстановкой в формулу
e Jt E |
|
Jt |
|
(Jt)2 |
... |
(Jt)k |
|
... |
|
||
1! |
|
k ! |
|
||||||||
|
|
|
2! |
|
|
|
|
||||
ЗАМЕЧАНИЕ 2. |
Кроме |
того, |
матрица |
e A t |
может быть |
||||||
найдена по формулам
а) для случая различных собственных значений (действитель-
ных или комплексных) |
|
|
|
|
|
||
|
|
A 2 E |
|
|
A 1E |
|
|
e At |
e 1t |
|
e 2t |
|
|||
|
|
||||||
|
|
|
|
|
|
; |
|
|
|
1 2 |
|
2 1 |
|||
б) для случая одинаковых собственных значений 1 2 0
eAt e 0t E t A 0 E ,
1 0 где E .
0 1
66
Таблица 3.2. Определение вида матрицы e J t
Характер собствен- |
eJt |
J |
|
ных значений |
|
|
|
|
0 |
|
e 1t |
|
|
0 |
|
|
||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
2 |
|
0 |
|
|
|
0 |
e |
2t |
|
|||
|
|
|
|
|
2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
1 |
|
|
0t |
|
|
0t |
|
|||||
|
0 |
|
|
|
e |
|
t e |
|
|
|
||||
1 |
2 |
0 |
|
0 |
|
|
|
|
|
0t |
|
|||
|
|
0 |
|
|
0 |
e |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||||||
1,2 |
i |
|
|
e t |
cos t |
e t sin t |
||||||||
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
t |
sin t |
|
cos t |
|
|||
|
0 |
|
|
|
e |
e |
|
|
||||||
Исходя из вышеизложенного, алгоритм нахождения решения можно разделить на несколько шагов. Рассмотрим это на примере.
ПРИМЕР 3.7. Найти решение системы
|
dx1 |
|
3x |
2x |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
dt |
1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx2 |
4x |
3x |
2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||
|
dt |
1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
(0) |
|
|
x 0 |
|
|
|||
при начальных условиях X 0 |
1 |
|
|
|
|
|
|
1 |
|
|
|||
|
(0) |
|
|
x |
0 |
. |
|||||||
|
|
|
|
x2 |
|
|
|
2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
3 |
|
2 |
|
|
Шаг 1. Запишем матрицу системы A |
|
|
|
|
. |
||||||||
|
|
|
|
|
|
|
|
|
4 |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Найдем след и определитель матрицы системы
|
|
|
|
|
67 |
|
|
|
Sp A 3 3 0 |
, |
DetA |
|
2 |
|
9 8 1 0. |
||
3 |
|
|||||||
|
|
4 |
3 |
|
|
|||
|
|
|
|
|
|
|
|
|
Согласно рис. 3.12 отрицательное значение определителя Det A < 0
свидетельствует о том, что неподвижная точка x1 x2 0 является неустойчивым положением равновесия, а фазовый портрет является
«седлом».
Шаг 2. Запишем характеристическое уравнение матрицы А и
найдем собственные значения матрицы А
|
|
|
3 |
2 |
|
0 |
|
|
|
|
|||
|
|
|
4 3 |
|
||
|
|
|
|
|
||
1 1; |
2 |
1 - действительные и различные. |
||||
Шаг 3. По виду собственных значений 1, 2 согласно табл. 3.2 или приложения П. 1.9 выбираем матрицу
|
1 |
0 |
J |
|
. |
|
0 |
|
|
1 |
|
Шаг 4. Найдем матрицу перехода Т (Приложение 1), решая |
||
матричное уравнение |
|
|
J T 1AT |
||
TJ AT . |
||
|
a |
b |
Обозначаем |
T |
. Т огдаполучаем |
|
|
|
|
c |
d |
a |
b 1 |
0 |
3 |
2 a |
b |
|||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
4 |
3 |
|
|
c |
d |
1 |
|
c |
d |
|||
|
|
|
|
68 |
|
|
a |
b |
3a 2c |
3b 2d |
|||
|
|
|
|
|
|
|
|
|
|
4a 3c |
|
||
c |
d |
|
4b 3d . |
|||
Приравнивая элементы матрицы, стоящие на одинаковых местах,
получаем систему уравнений:
3a 2c a; |
3b 2d b; |
4a 3c c; |
4b 3d d, |
которая имеет множество решений, удовлетворяющих соотноше-
ниям
a c
2b d .
Выбирая простейшее из этих решений, получаем матрицу перехода
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||
Шаг 5. Находим обратную матрицу T 1 : |
|
|
|
|
|
|||||||||
|
|
|
1 |
t |
|
|
|
t |
|
|
2 |
1 |
|
|
DetT 1; |
T 1 |
|
|
|
22 |
|
12 |
|
|
|
||||
|
|
|
||||||||||||
|
|
|
DetT |
t |
21 |
|
t |
|
|
1 |
. |
|||
|
|
|
|
|
|
11 |
|
|
1 |
|||||
Шаг 6. Проверяем правильность нахождения |
Т и T 1 подста- |
|||||||||||||
новкой в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 1 3 |
2 |
1 1 |
|
1 |
0 |
J |
|
||||||
T 1AT |
1 |
|
|
3 |
|
|
|
|
|
|
|
|||
|
1 |
4 |
1 2 |
|
0 |
1 |
|
. |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Шаг 7. По виду матрицы J выберем матрицу eJt по табл. 3.2.
|
|
t |
0 |
|
|
eJt e |
|
|
|||
|
0 |
e |
t |
||
|
|
|
|||
и находим матрицу e A t :
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
69 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|||||
|
At |
|
|
|
Jt |
|
|
1 |
|
|
|
|
e |
|
|
|
0 |
|
|
|
|
|
|
1 |
|
|
|
|
||||||||||||
e |
Te |
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
e |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
t |
|
t |
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
t |
|
|
|
t |
|
|
|
|
|
t |
|
t |
||||||||||||
e |
|
e |
|
|
|
|
|
|
|
|
|
|
2e |
|
e |
|
|
|
|
|
|
e e |
|
|
|
. |
||||||||||||||
|
|
t |
|
|
|
|
|
|
|
|
|
t |
|
|
|
t |
||||||||||||||||||||||||
t |
2e |
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
t |
|
2e |
|
|
|
|
t |
2e |
|
|||||||||||||||
e |
|
|
|
|
|
|
|
|
|
|
2e |
|
|
|
|
|
|
e |
|
|
|
|
||||||||||||||||||
Шаг 8. Запишем решение системы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
x |
|
e At X |
|
|
|
2e |
t |
|
e |
t |
|
|
|
e |
t |
e |
t |
|
|
0 |
|
|
||||||||||||||||||
X 1 |
|
0 |
|
|
|
|
|
t |
|
|
|
|
|
t |
x1 |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
2e |
|
e |
t |
|
2e |
|
|
0 |
|
|
||||||||||||||||
x2 |
|
|
|
|
|
|
|
|
|
2e |
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|||||||||||||||||
|
|
|
x |
0 |
(2et e t ) x |
|
0 |
( et e t ) |
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
2e t ) x |
2 |
|
( et 2e t ) |
. |
|
|
|
|
||||||||||||||||||||||||
|
|
|
x |
0 |
(2et |
|
0 |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Эта запись удобна тем, что позволяет сразу находить решение
x 0 |
|
|
|
|
1 |
|
X 0 . |
системы при любых начальных условиях |
0 |
|
|
x2 |
|
|
|
ЗАДАЧА 3.3. Решите системы уравнений:
а) |
dx1 / dt 2x1 2x2 |
; б ) |
dx1 / dt 3x1 2x2 |
; |
|||||
|
dx |
2 |
/ dt x |
|
dx |
2 |
/ dt x 4x |
2 |
|
|
|
1 |
|
|
1 |
|
|||
в) |
dx1 / dt 2x1 x2 . |
|
|
|
|
|
|
||
|
dx |
2 |
/ dt x |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
3.5. НЕОДНОРОДНЫЕ СИСТЕМЫ
Неоднородные линейные системы дифференциальных урав-
нений с постоянными коэффициентами имеют вид

70
dxdt1 a11x1 a12 x2 f1(t) dxdt2 a21x1 a22 x2 f2 (t)
или в матричном виде
dX |
AX F . |
(3.29) |
|
dt |
|||
|
|
Здесь введена матрица
f1(t) F .
f2 (t)
Умножим (3.29) слева на обратную матрицу e At и проинтегриру-
ем:
|
|
e |
At dX |
e |
At |
A X e |
At |
F (t); |
||||||||||
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
e |
At dX |
e |
At |
|
AX e |
At |
F (t) ; |
|||||||||
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
d (e At X ) |
e At F (t) ; |
||||||||||||
|
|
|
|
|
|
|
dt |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
t |
d e A X |
|
|
|
|
t |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
e A F ( )d ; |
||||||
|
|
|
|
|
d |
|
|
|
|
|||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
e A F ( )d . |
||||||||||||||||
e A X |
t0 |
e At X (t) e A 0 X (0) |
||||||||||||||||
0
Умножим последнее выражение слева на матрицу e A t
t
e At e At X (t) e At X 0 e At e A F ( )d .
0