

§1.6. Дискредитация (квантование) по времени или по текущей координате
Для удобства
изложения будем считать сигнал
![]() динамическим
сигналом (t
– текущее время),
хотя все ниже приведенные рассуждения
будут справедливы и для статических
сигналов, для которых t
– текущая пространственная координата.
динамическим
сигналом (t
– текущее время),
хотя все ниже приведенные рассуждения
будут справедливы и для статических
сигналов, для которых t
– текущая пространственная координата.
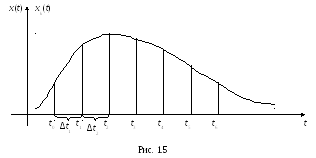
Непрерывный сигнал
![]() может быть преобразован в непрерывный
сигнал дискретного аргумента путем
взятия отсчетов мгновенных значений
(выборок) через интервалы времени
может быть преобразован в непрерывный
сигнал дискретного аргумента путем
взятия отсчетов мгновенных значений
(выборок) через интервалы времени![]() ,
,![]() ,
,![]() и т.д.
(рис.1.5).
и т.д.
(рис.1.5).
Такое преобразование
называют дискретизацией или квантованием
по времени. Полученный в результате
сигнал
![]() называют
квантованным по времени, и он представляет
собой последовательность отсчетов
мгновенных значений, взятых в дискретные
моменты времени.
называют
квантованным по времени, и он представляет
собой последовательность отсчетов
мгновенных значений, взятых в дискретные
моменты времени.
Интервалы
дискретизации
![]() ,
,![]() ,
,![]() и т.д. могут
быть различны, хотя с практической точки
зрения их часто берут одинаковыми
и т.д. могут
быть различны, хотя с практической точки
зрения их часто берут одинаковыми
![]() ,
,
![]() .
(1.17)
.
(1.17)
В этом случае говорят, что дискретизация по времени производится с постоянным шагом.
Для аналитического
описания процесса дискретизации по
времени используют импульсную функцию
дискретизации
![]() ,
которая представляет собой периодическую
последовательность -функций,
то есть:
,
которая представляет собой периодическую
последовательность -функций,
то есть:
![]() ,
(1.18)
,
(1.18)
где
![]() – дельта-функция;
– дельта-функция;
k - номер дельта-функции в последовательности;
![]() - период следования
дельта-функции;
- период следования
дельта-функции;
Следует отметить,
что дельта-функция
![]() определяется следующим образом:
определяется следующим образом:
![]() (1.19)
(1.19)
причем площадь, ограниченная -функцией равна 1, то есть
![]() .
(1.20)
.
(1.20)
Процесс дискретизации
по времени непрерывного сигнала
![]() может рассматриваться как умножение
этого сигнала на импульсную функцию
дискретизации
может рассматриваться как умножение
этого сигнала на импульсную функцию
дискретизации![]() ,
то есть
,
то есть
![]() .
(1.21)
.
(1.21)
Учитывая то, что
функция
![]() отлична от 0 только в моменты времени
отлична от 0 только в моменты времени![]() ,
выражение (1.21) может быть записано в
следующем виде
,
выражение (1.21) может быть записано в
следующем виде
![]() .
(1.22)
.
(1.22)
Отсюда следует,
что умножение непрерывного сигнала
![]() на -функцию
приводит к тому, что площадь, ограниченная
-функцией
становиться численно равной значению
сигнала в момент времени
на -функцию
приводит к тому, что площадь, ограниченная
-функцией
становиться численно равной значению
сигнала в момент времени
![]() .
Эту площадь обычно называют весом-функции
и он равен мгновенному отсчету сигнала
.
Эту площадь обычно называют весом-функции
и он равен мгновенному отсчету сигнала
![]() в момент времени
в момент времени![]() .
.
Таким образом, процесс дискретизации по времени соответствует образованию периодической последовательности -функций, вес каждой составляющей которой численно равен мгновенным значениям сигнала в момент взятия отсчета.
При практическом выполнении дискретизации по времени, естественно, возникает вопрос:
каков должен быть
оптимальный интервал дискретизации
![]() ,
чтобы можно было восстановить по
квантованному сигналу
,
чтобы можно было восстановить по
квантованному сигналу![]() исходный непрерывный сигнал
исходный непрерывный сигнал
![]() с достаточной точностью. Действительно,
если интервал дискретизации
с достаточной точностью. Действительно,
если интервал дискретизации
![]() будет достаточно велик, это приведет к
большим погрешностям восстанавливаемого
непрерывного сигнала в промежутках
между отсчетами, а если интервал
дискретизации будет мал, то это значительно
увеличит число отсчетов и, следовательно,
увеличиться объем обрабатываемых
данных.
будет достаточно велик, это приведет к
большим погрешностям восстанавливаемого
непрерывного сигнала в промежутках
между отсчетами, а если интервал
дискретизации будет мал, то это значительно
увеличит число отсчетов и, следовательно,
увеличиться объем обрабатываемых
данных.
Для
реальных сигналов,
то есть таких сигналов, у которых
длительность (Т)
конечна, максималльная частота в спектре
(![]() )
и мощность сигнала ограничены из-за
инерционности и ограниченности по
мощности реальных источников сообщений,
оптимальный интервал дискретизации
может быть определен на основе теоремы
Котельникова (теорема отсчетов),
доказательство которой приведено в Гл.
. Из этой теоремы следует, что непрерывный
сигнал длительностиТ
и не содержащий частот в спектре выше
)
и мощность сигнала ограничены из-за
инерционности и ограниченности по
мощности реальных источников сообщений,
оптимальный интервал дискретизации
может быть определен на основе теоремы
Котельникова (теорема отсчетов),
доказательство которой приведено в Гл.
. Из этой теоремы следует, что непрерывный
сигнал длительностиТ
и не содержащий частот в спектре выше
![]() полностью определяется последовательностью
своих раноотстоящих мгновенных значений,
взятых с интервалом
полностью определяется последовательностью
своих раноотстоящих мгновенных значений,
взятых с интервалом
![]() ,
общее число которых не превышаетN,
причем
,
общее число которых не превышаетN,
причем
![]() ;
(1.23)
;
(1.23)
![]() .
.
Исходный непрерывный
сигнал
![]() может быть
точно восстановлен по квантованному
сигналу
может быть
точно восстановлен по квантованному
сигналу
![]() в соответствии с уравнением
в соответствии с уравнением
![]() ,
(1.24)
,
(1.24)
причем
предварительно квантованный сигнал
![]() должен быть пропущен через фильтр с
верхней границей пропускания равной
должен быть пропущен через фильтр с
верхней границей пропускания равной![]() .
.
Дискретизация по времени является неотъемлемой и ответственной частью аналого-цифрового преобразования, нарушения при проведении которого ёведет к появлению шумов и погрешностей дискретизации, причем можно выделить несколько причин их появления.
Во-первых,
из-за инерционности реальных устройств,
процесс дискретизации по времени
осуществляется ни на основе
последовательности дельта-функций (как
того требует соотношение (1.21)), а на
основе последовательности импульсов
конечной длины
![]() ,близким
по форме к прямоугольным. Поэтому
результат дискретизации по времени
можно представить в виде:
,близким
по форме к прямоугольным. Поэтому
результат дискретизации по времени
можно представить в виде:
![]() .
(1.25)
.
(1.25)
Различия в спектрах
последовательности -функций
и последовательности конечных импульсов
ведут к искажению спектра квантованного
сигнала
![]() и, как следствие, к искажению
восстанавливаемого непрерывного сигнала
и, как следствие, к искажению
восстанавливаемого непрерывного сигнала
![]() .
.
Второй причиной
появления шумов и погрешностей является
неограниченность спектра или наличие
в спектре сигнала частот, превышающих
априорно максимальную (![]() ).В этом
случае условие теоремы Котельникова
нарушается, и частотные составляющие
непрерывного сигнал
).В этом
случае условие теоремы Котельникова
нарушается, и частотные составляющие
непрерывного сигнал
![]() с частотами,
большими половины частоты отсчетов
создают помеху – так называемый «шум
дискретизации».
с частотами,
большими половины частоты отсчетов
создают помеху – так называемый «шум
дискретизации».
Еще одна возможность
появления шумов в процессе дискретизации
возникает при дискретизации изображений
или сигналов хотя и с ограниченным
спектром, но зашумленных «белым шумом»,
для которого
![]() .
В этом случае отдельные отсчеты слишком
далеко отстоят друг от друга и они могут
нести в себе вклад как от высоких частот
белого шума, так и от низких частот
исходного сигнала. Это явление носит
название маскировки частот и представляет
собой источник ошибок, присущий только
цифровым системам обработки.
.
В этом случае отдельные отсчеты слишком
далеко отстоят друг от друга и они могут
нести в себе вклад как от высоких частот
белого шума, так и от низких частот
исходного сигнала. Это явление носит
название маскировки частот и представляет
собой источник ошибок, присущий только
цифровым системам обработки.
Для устранений
явления маскировки частот и шума
дискретизации необходимо выбирать
интервал дискретизации (![]() )
из наивысшей частоты
)
из наивысшей частоты![]() ,
возможной в квантуемом непрерывном
сигнале
,
возможной в квантуемом непрерывном
сигнале
![]() .
Кардинальный метод борьбы с этими
явлениями заключается в фильтрации
сигналов до процесса дискретизации по
времени таким образом, чтобы составляющие
с частотами, нарушающие условие теоремы
Котельникова, отсутствовали.
.
Кардинальный метод борьбы с этими
явлениями заключается в фильтрации
сигналов до процесса дискретизации по
времени таким образом, чтобы составляющие
с частотами, нарушающие условие теоремы
Котельникова, отсутствовали.
Рассмотренные
методы дискретизации по времени с
постоянным шагом (![]() )
всегда подразумевает априорные сведения
о характеристиках сигнала, в частности
)
всегда подразумевает априорные сведения
о характеристиках сигнала, в частности![]() .
Эти методы отличаются простотой, так
как нет необходимости регистрировать
моменты взятия отсчетов. Однако
несоответствие интервала дискредитации
(
.
Эти методы отличаются простотой, так
как нет необходимости регистрировать
моменты взятия отсчетов. Однако
несоответствие интервала дискредитации
(![]() )
конкретным текущим характеристикам
квантуемого сообщения или отклонение
этих характеристик от априорных ведет
к избыточности отсчетов.
)
конкретным текущим характеристикам
квантуемого сообщения или отклонение
этих характеристик от априорных ведет
к избыточности отсчетов.
Наряду с дискретизацией с постоянным шагом, которую часто еще называют равномерной дискретизацией, существует и неравномерная дискретизация, при которой интервал дискретизации может изменяться либо по случайному закону, либо в соответствии с изменениями характеристик квантуемого сигнала. Последний вид дискретизации часто называют адаптивной дискретизацией. Методы адаптивной дискретизации более сложны в алгоритмическом смысле и в технической реализации, однако они позволяют существенно уменьшить избыточность отсчетов, что очень важно при обработке больших потоков информации.