

kotrolnaya_teoreticheskaya_mekhanika_dinamika
.pdfВопросы и задания для самоконтроля
1.Записать формулу для определения модуля силы упругости пружины.
2.Записать дифференциальное уравнение свободных колебаний точки.
3.Записать уравнения свободных колебаний точки.
4.Сформулировать определение понятия «амплитуда сво-
бодных колебаний точки».
5.Сформулировать определение понятия «период свобод-
ных колебаний точки».
6.Сформулировать определение понятия «циклическая частота свободных колебаний точки».
7.Записать дифференциальное уравнение затухающих колебаний точки.
8.Записать уравнения затухающих колебаний точки.
9.Сформулировать определение понятия «период зату-
хающих колебаний точки».
10.Сформулировать определение понятия «амплитуда за-
тухающих колебаний точки».
11.Какие колебания называют колебаниями с малым со-
противлением внешней среды?
12.Записать уравнения апериодического движения точки.
13.Под действием каких сил происходят вынужденные колебания материальной точки?
14.Записать формулу для определения периода возму-
щающей силы.
15.Записать дифференциальное уравнение движения точки под действием восстанавливающей и возмущающей сил.
16.Записать уравнение вынужденных колебаний малой частоты.
17.Записать уравнение вынужденных колебаний большой частоты.
18.Записать условие, при котором происходит явление резо-
нанса.
19.Записать дифференциальное уравнение движения точки, происходящее под действием восстанавливающей силы, возмущающей силы, изменяющейся по периодическому закону, и силы сопротивления движению, пропорциональной первой степени скорости.
71
3.ДИНАМИКА ОТНОСИТЕЛЬНОГО ДВИЖЕНИЯ ТОЧКИ
3.1.Дифференциальные уравнения относительного
движения материальной точки. Переносная и кориолисова силы инерции
Два первых закона классической механики и полученные на их основе уравнения справедливы при движении точки в инерциальной системе отсчета (ИСО). Существует ряд технических задач, в которых рассматривают движение материальной точки в подвижной системе отсчета (ПСО), которая в общем случае не является инерциальной.
Инерциальная система отсчета – система отсчета, по отношению к которой изолированная материальная точка находится в покое или движется равномерно и прямолинейно.
Система отсчета, не обладающая этим свойством, называется
неинерциальной системой отсчета
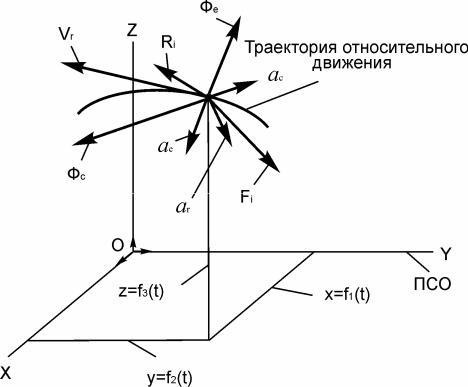
Рассмотрим движение материальной точки под действием активных сил Fi и реакций Ri относительно неинерциальной системы отсчета (рис. 3.1).
Напомним некоторые понятия кинематики, используемые в данном разделе динамики точки.
Движение точки по отношению к неподвижной системе отсчета O1X1Y1Z1 называется абсолютным и характеризуется абсолют-
ной скоростью V и абсолютным ускорением a. Положение точ-
ки на траектории абсолютного движения определяется тремя зависящими от времени координатами, которые называются уравне-
ниями абсолютного движения:
x1 = f1(t); y1 = f2(t); z1 = f3(t).
Неподвижная система отсчета O1X1Y1Z1 является инерциальной. В этой системе отсчета основное уравнение динамики имеет вид
ma = ΣFi + ΣRi,
где Fi – активная сила; Ri – реакция внешней связи.
Движение точки по отношению к подвижной системе отсчета OXYZ называется относительным и характеризуется относи-
тельной скоростью Vr и относительным ускорением ar. По-
ложение точки на траектории относительного движения определяется тремя зависящими от времени координатами, которые назы-
ваются уравнениями относительного движения:
72

х = f4(t); y = f5(t); z = f6(t).
Рис. 3.1
Подвижная система отсчета OXYZ не является инерциальной. Применение в чистом виде первого и второго законов классической механики в ИСО неправомерно.
Рассмотрим переносное движение точки (рис. 3.2) и напомним суть некоторых понятий кинематики, используемых в этом разделе динамики.
Если координаты точки в ПСО постоянны (x = C1 = const; y = C2 = const; z = C3 = const), то движение этой точки вместе с ПСО по отношению к неподвижной системе отсчета называют переносным движением. Это движение характеризуется переносной ско-
ростью Ve и переносным ускорением ae. Положение точки на траектории переносного движения определяется тремя зависящими от времени координатами, которые называют уравнениями пере-
носного движения:
x1 |
= f (t); |
y1 |
= f (t); |
z1 |
= f (t). |
1 |
7 |
1 |
8 |
1 |
9 |
Из курса кинематики известно, что абсолютное ускорение a точки определяют по формуле
73

a = ar + ae + ac,
где ar – относительное ускорение; ae – переносное ускорение; ac – ускорение Кориолиса.
Рис. 3.2
Ускорение Кориолиса определяют по формуле
ac = 2(ωе × Vr),
где ωе – вектор угловой скорости переносного вращения.
Модуль кориолисова ускорения находят по формуле
ac = 2ωe·Vr·sin(ωе,Vr).
Кориолисово ускорение равно нулю в трех случаях:
1)если ωe = 0, т. е. в случае поступательного переносного движения или в момент обращения в нуль угловой скорости непоступательного переносного движения;
2)если Vr = 0, т. е. в случае относительного покоя точки или в момент равенства нулю относительной скорости движущейся точки;
3)если sin(ωе,Vr) = 0, т. е. в случае, когда вектор относительной скорости Vr и вектор переносной угловой скорости ωе
параллельны.
Направление кориолисова ускорения определяется по правилу векторного произведения. Согласно этому правилу вектор ac одно-
74
временно перпендикулярен векторам ωе и Vr. При этом ac направлено в сторону, откуда поворот вектора ωе к вектору Vr для совмещения их направлений виден происходящим против хода часовой стрелки. Поворот осуществляется на угол меньше 180о.
Для определения направления ускорения Кориолиса исполь-
зуют также правило Жуковского: для определения направления ускорения Кориолиса необходимо относительную скорость Vr точки спроецировать на плоскость, перпендикулярную оси вращения, и повернуть эту проекцию в той же плоскости на угол 90о в сторону переносного вращения.
Если подставим абсолютное ускорение a = ar + ae + ac в основное уравнение динамики точки ma = ΣFi + ΣRi, то получим
m(ar + ae + ac) = ΣFi + ΣRi.
Разрешим это уравнение относительно mar: mar = ΣFi + ΣRi – mae – mac.
Введем два вектора: Фе = – mae; Фс = – mac. Эти векторы назо-
вем переносной и кориолисовой силами инерции.
При исследовании движения механических систем в теоретической механике используют следующие понятия.
Сила инерции – величина, равная произведению массы материальной точки на ее ускорение и направленная противоположно этому ускорению.
Переносная сила инерции при рассмотрении движения материальной точки в неинерциальной системе отсчета – величина, равная произведению массы точки на ее переносное ускорение и направленная противоположно этому ускорению.
Кориолисова сила инерции при рассмотрении движения точки в неинерциальной системе отсчета – величина, равная произведению массы точки на ее кориолисово ускорение и направленная противоположно этому ускорению.
Используя понятия переносной и кориолисовой сил инерции, получим
mar = ΣFi + ΣRi + Фе + Фс.
Последнее выражение называют дифференциальным уравнением относительного движения точки в векторной форме или ос-
новным уравнением динамики относительного движения.
75
Произведение массы m точки на ее относительное ускорение ar равно геометрической сумме активных сил Fi, реакций внешних связей Ri, переносной силы инерции Фе и кориолисовой силы инерции Фс.
Проецируя последнее векторное равенство на координатные оси ПСО, получим дифференциальные уравнения относительного движения точки:
mx = ΣFiоx + ΣRiоx + Феоx + Фсоx; my = ΣFiоy + ΣRiоy + Феоy + Фсоy;
mz = ΣFiоz + ΣRiоz + Феоz + Фсоz.
Произведение массы точки на проекцию ее относительного ускорения на координатную ось ПСО равно сумме проекций активных сил, реакций внешних связей и переносной и кориолисовой сил инерции на ту же ось.
Силы инерции Фе, Фс направлены противоположно ускорениям ae, ac (рис. 3.3).
Рис. 3.3
Дифференциальные уравнения относительного движения точ-
ки (mx = ΣFiоx + ΣRiоx + Феоx + Фсоx; my = ΣFiоy + ΣRiоy + Феоy + Фсоy; mz = ΣFiоz + ΣRiоz + Феоz + Фсоz) отличаются от дифференциальных
76

уравнений движения точки в инерциальной |
системе отсчета |
(mx = ΣFiоx + ΣRiоx; my = ΣFiоy + ΣRiоy; mz = ΣFiоz |
+ ΣRiоz) наличием в |
правой части этих уравнений проекций на соответствующие координатные оси переносной и кориолисовой сил инерции.
3.2. Частные случаи относительного движения материальной точки
Случай 1.
Переносное движение – неравномерное вращение тела вокруг неподвижной оси, относительное движение – прямолинейное (рис. 3.4).
Рис. 3.4
В этом случае переносное ускорение ae равно геометрической сумме центростремительного и вращательного ускорений:
ae = aeω +aeε ,
где aeω, aeε – соответственно центростремительное и враща-
тельное переносные ускорения.
В соответствии с этим имеем
77

Фе = – mae = – m(aeω +aeε ) = – maeω – maeε = Фωе + Фεе ,
где Фωе = – maeω – центробежная переносная сила инерции;
Фεе = – maeε – вращательная переносная сила инерции.
Для рассматриваемого случая модули переносных центробежной и вращательной сил инерции находят по формулам:
Фωе = m(ωe)2x; Фεе = mεx.
Основное уравнение динамики и дифференциальные уравнения относительного движения точки в этом случае описываются следующими выражениями:
mar = ΣFi + ΣRi + Фωе + Фεе + Фс; mx = ΣFiоx + ΣRiоx + Фωеох + Фεеох + Фсоx; my = ΣFiоy + ΣRiоy + Фωеоу + Фεеоу + Фсоy; mz = ΣFiоz + ΣRiоz + Фωeoz + Фεeoz + Фсоz.
Случай 2.
Переносное движение – равномерное вращение (ωe = const) вокруг неподвижной оси, относительное движение – прямолинейное
(рис. 3.5).
Рис. 3.5
78

В этом случае угловое ускорение переносного вращения εе = 0 и, следовательно, переносная вращательная сила инерции Фе = 0. Тогда основное уравнение динамики и дифференциальные уравнения относительного движения точки описываются выражениями:
mar = ΣFi + ΣRi + Фωе + Фс; mx = ΣFiоx + ΣRiоx + Фωеох + Фсоx; my = ΣFiоy + ΣRiоy + Фωеоу + Фсоy; mz = ΣFiоz + ΣRiоz + Фωeoz + Фсоz.
Случай 3.
Переносное движение – поступательное неравномерное криволинейное движение, относительное движение – прямолинейное
(рис. 3.6).
Рис. 3.6
Согласно рис. 3.6 механизм содержит кривошипы 1, 2 и прямоугольную пластину 3, по которой перемещается материальная точка по закону x = f(t). Кривошипы 1, 2 совершают вращательные движения, а пластина 3 – поступательное движение.
79
В рассматриваемом случае имеем ωе = 0 и Фс = 0, поэтому основное уравнение динамики относительного движения принимает вид
mar = ΣFi + ΣRi + Фе,
где Фе = – mae – переносная сила инерции.
Так как переносное движение является поступательным, то его ускорение ae равно ускорению точки А тела D. С другой стороны, точка А принадлежит кривошипу О1А, совершающему вращательное неравномерное движение (ωе ≠ 0; εе ≠ 0). Тогда
ae = aА = aAω +aAε = aen +aeτ ,
где aAω, aAε – соответственно центростремительное и вращательное ускорения точки А кривошипа О1А; aen, aeτ – соответственно нормальное и касательное переносные ускорения.
Отсюда вытекает очевидные равенства:
aen =aAω = ω2·r; aeτ = aAε = ε·r; Фen = – maen ; Феτ = – maeτ ,
где Фen , Феτ – переносные нормальная и касательная силы инерции.
С учетом того, что Фе = Фen +Феτ , имеем:
mar = ΣFi + ΣRi + Фen + Феτ ; mx = ΣFiоx + ΣRiоx + Фneox + Фeox ; my = ΣFiоy + ΣRiоy + Фneoy + Фeoy ; mz = ΣFiоz + ΣRiоz + Фneoz + Фeoz .
Случай 4.
Переносное движение – поступательное прямолинейное и равномерное. В этом случае имеем: ωе = 0; ae = 0 и, следовательно, Фс = 0, Фе = 0. Тогда основное уравнение динамики относительного движения принимает вид
mar = ΣFi + ΣRi.
Это уравнение не отличается от основного уравнения динамики материальной точки в инерциальной системе отсчета, которое имеет вид
ma = ΣFi + ΣRi.
80