

kotrolnaya_teoreticheskaya_mekhanika_dinamika
.pdfПолученные результаты расчетов проиллюстрируем рис. 1.8.
Рис. 1.8
Таким образом, задача решена. Ответы на вопросы получены.
1.11. Алгоритм решения вторых задач динамики точки в декартовой системе отсчета
Во второй (обратной) задаче динамики по известным силам, действующим на материальную точку, и начальным условиям ее движения требуется определить уравнения движения точки: x = f1(t), y = f2(t), z = f3(t), а также ее положение, скорость и ускорение в момент времени t1. Эта задача имеет большое практическое значение и в общем случае является более сложной по сравнению с первой задачей динамики.
Алгоритм решения второй задачи динамики содержит следующие действия.
31
1.В механической системе выделяют материальную точку, движение которой рассматривают.
2.Выбирают инерциальную систему отсчета ОXYZ. Начало системы отсчета располагают в точке тела, по отношению к которому рассматривают движение выделенной из механической системы материальной точки.
3.В системе отсчета ОXYZ точку изображают в произвольный момент времени таким образом, чтобы она имела положительные координаты и двигалась в сторону их увеличения ускоренно.
4.По исходным данным задачи определяют и изображают на
рисунке начальные условия движения (x0, y0, z0, x0, y0, z0 ).
5.К точке прикладывают активные (задаваемые) силы Fi.
6.Согласно аксиоме связей эти связи отбрасывают и их действие заменяют соответствующими реакциями Ri.
7.Записывают дифференциальные уравнения движения точ-
ки:
mx = ΣFiоx + ΣRiоx; my = ΣFiоy + ΣRiоy; mz = ΣFiоz + ΣRiоz ,
где x, y, z – проекции ускорения a на координатные оси; ΣFiоx, ΣFiоy, ΣFiоz – суммы проекций активных сил Fi на соответствующие координатные оси ИСО; ΣRiоx, ΣRiоy, ΣRiоz – суммы проекций реакций Ri внешних связей на оси ИСО.
8.Дифференциальные уравнения движения точки дважды интегрируют. При интегрировании каждого дифференциального уравнения появляются две постоянные и, следовательно, при интегрировании трех дифференциальных уравнений будем иметь шесть постоянных: С1 – С6.
9.Определяют значения постоянных Ci интегрирования по начальным условиям движения: значения трех координат точки и проекции ее скорости на три оси в некоторый момент времени, обычно (но не обязательно) в начальный момент времени (t0 = 0). Как правило, в условиях задачи задают следующие на-
чальные условия движения: x0, y0, z0, x0, y0, z0 . Эти данные
подставляют в уравнения, представляющие общие решения дифференциальных уравнений движения точки, и определяют постоянные интегрирования Ci.
10. Подставляя найденные значения постоянных интегрирования Ci в общие решения дифференциальных уравнений движения точки, получают уравнения ее движения в виде:
32
x = f1(t, x0, y0, z0, x0, y0, z0 ); y = f2(t, x0, y0, z0, x0, y0, z0 ); z = f3(t, x0, y0, z0, x0, y0, z0 ).
Анализ последних уравнений показывает, что под действием одной и той же системы сил, приложенных к точке, она может совершать целый класс движений, зависящих от начальных условий.
При составлении дифференциальных уравнений движения материальной точки за расчетный начальный момент времени (t0 = 0) обычно принимают момент начала движения точки под действием заданных сил, для которого известны как положение точки, так и ее скорость.
Введением начальной скорости точки учитывают влияние на ее движение сил, действующих на точку до того момента времени, который принят за начальный момент.
Дифференциальные уравнения движения точки описывают ее движение до тех пор, пока на точку действует заданная система сил.
Если в какой-то момент времени система сил, действующих на точку, изменится, то для описания последующего движения точки составляют новые дифференциальные уравнения. Начальными условиями нового движения точки будут ее положение и скорость в конце предшествующего движения.
11. По уравнениям движения точки x = f1(t), y = f2(t), z = f3(t) определяют ее кинематические характеристики для заданного момента времени t1. Как правило, результаты расчетов сводят в таблицу и при необходимости иллюстрируют рисунками.
Алгоритм решения вторых задач динамики в естественных координатных осях по существу не отличается от вышеприведенного алгоритма. Здесь он не рассмотрен, так как студенты заочной и дистанционной форм обучения не выполняют курсовых заданий на эту тему.
Для закрепления изложенного теоретического материала рекомендуется выполнить курсовое задание Д 1.
33

1.12. Варианты курсового задания Д 1 «Интегрирование дифференциальных уравнений движения материальной точки,
находящейся под действием постоянных сил»
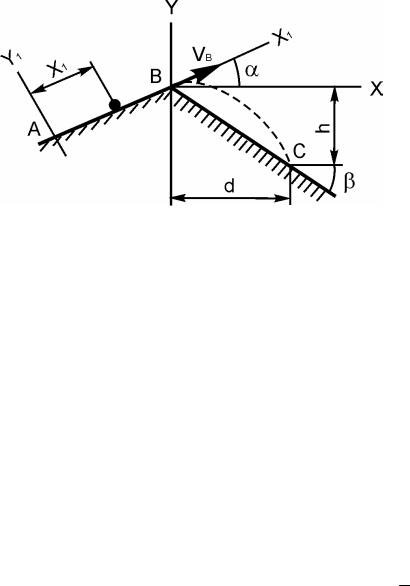
Варианты 1 – 5 (рис 1.9)
Рис. 1.9
Тело совершает поступательное движение из точки А по участку АВ (длиной l) наклонной плоскости, составляющей угол α с горизонтом, в течение τ секунд. Его начальная скорость VA. Коэффициент трения скольжения тела по плоскости равен f.
В точке В тело покидает плоскость со скоростью VB и попадает со скоростью VC в точку С плоскости BD, наклоненной под углом β к горизонту, находясь в воздухе Т секунд.
При решении задачи тело принять за материальную точку; сопротивление воздуха не учитывать.
Вариант 1. Дано: α = 30о; VA = 0; f = 0,2; l = 10 м; β = 60о. Опре-
делить τ и h.
Вариант 2. Дано: α = 15о; VA = 2 м/с; f = 0,2; h = 4 м; β = 45о. Оп-
ределить l и уравнение траектории точки на участке ВС.
Вариант 3. Дано: α = 30о; VA = 2,5 м/с; f ≠ 0; ; l = 8 м; d = 10 м; β= 60о. Определить VB и τ.
Вариант 4. Дано: VA = 0 м/с; τ = 2 с; l = 9,8 м; β = 60о; f = 0. Оп-
ределить α и T.
Вариант 5. Дано: α = 30о; VA = 0 м/с; τ = 3 с; l = 9,8 м; β = 45о.
Определить f и VC.
34
Варианты 6 – 10 (рис. 1.10)
Рис. 1.10
Тело совершает поступательное движение и подходит к точке А участка АВ, наклоненного под углом α к горизонту и имеющего длину l со скоростью VA. Коэффициент трения скольжения на участке АВ равен f. Тело от А до В движется τ секунд; в точке В со скоростью VB оно покидает участок АВ. Через Т секунд тело приземляется со скоростью VC в точке С участка ВС, составляющем угол β с горизонтом.
При решении задачи тело принять за материальную точку и не учитывать сопротивление воздуха.
Вариант 6. Дано: α = 20о; f = 0,1; τ = 0,2 с; h = 40 м; β = 30о. Оп-
ределить l и VC.
Вариант 7. Дано: α = 15о; f = 0,1; VA = 16 м/с; l = 5 м; β = 45о.
Определить VB и T.
Вариант 8. Дано: VA = 21 м/с; f = 0; τ = 0,3 с; VB = 20 м/с; β = 60о.
Определить α и d.
Вариант 9. Дано: α = 15о; τ = 0,3 с; f = 0,1; h = 30
 2 м; β = 45о.
2 м; β = 45о.
Определить VB и VA.
Вариант 10. Дано: α = 15о; f = 0; VA = 12 м/с; d = 50 м; β = 60о.
Определить τ и уравнение траектории тела в системе отсчета XВY.
35

Варианты 11 – 15 (рис. 1.11)
Рис. 1.11
Имея в точке А скорость VA, тело поднимается τ с по участку АВ длиной l, составляющему с горизонтом угол α. При постоянной на всем участке АВ движущей силе Р тело в точке В приобретает скорость VB и перелетает через ров шириной d, находясь в воздухе Т секунд и приземляясь в точке С со скоростью VC. Масса тела равна m.
При решении задачи считать тело материальной точкой и не учитывать силы сопротивления движению.
Вариант 11. Дано: α = 30о; Р ≠ 0; l = 40 м; VA = 0; VB = 4,5 м/с; d = 3 м. Определить τ и h.
Вариант 12. Дано: α = 30о; Р = 0; l = 40 м; VB = 4,5 м/с; h = 1,5 м.
Определить VA и d.
Вариант 13. Дано: α = 30о; m = 400 кг; VA = 0; τ = 20 с; d = 3 м; h = 1,5 м. Определить Р и l.
Вариант 14. Дано: α = 30о; m = 400 кг; Р = 2,2 кН; VA = 0; l =40 м;
d = 5 м. Определить VB и VС.
Вариант 15. Дано: α = 30о; VA = 0; Р = 2 кН; l = 50 м; h = 2м; d = 4 м. Определить Т и m.
36

Варианты 16 – 20 (рис. 1.12)
Рис. 1.12
Тело скользит в течение τ с по участку АВ откоса, составляющему угол α с горизонтом и имеющему длину l. Его начальная скорость VA. Коэффициент трения скольжения тела по откосу равен f. Имея в точке В скорость VB , тело через Т секунд ударяется в точке С о защитную стену.
При решении задачи принять тело за материальную точку; со-
противление воздуха не учитывать.
Вариант 16. Дано: α = 30о; VA = 1 м/с; l = 3 м; f = 0,2; d = 2,5 м.
Определить T и h.
Вариант 17. Дано: α = 45о; l = 6 м; VB = 2VA; τ = 1 c; h = 6 м. Оп-
ределить d и f.
Вариант 18. Дано: α = 30о; l = 2 м; VA = 0; f = 0,1; d = 3 м. Опре-
делить h и τ.
Вариант 19. Дано: α = 15о; l = 3 м; VB = 3 м/с; f ≠ 0; τ = 1,5 c; d = 2 м. Определить VA и h.
Вариант 20. Дано: α = 45о; VA = 0; f = 0,3; d = 2 м; h = 4м. Опре-
делить l и τ.
37

Варианты 21 – 25 (рис. 1.13)
Рис. 1.13
Тело движется из точки А по участку АВ (длиной l) наклонной плоскости, составляющей угол α с горизонтом. Его начальная скорость VA. Коэффициент трения скольжения равен f. Через τ секунд тело в точке В со скоростью VB покидает наклонную плоскость и падает на горизонтальную плоскость в точку С со скоростью VC; при этом оно находится в воздухе Т секунд.
При решении задачи принять тело за материальную точку и не учитывать сопротивление воздуха.
Вариант 21. Дано: α = 30о; f = 0,1; VA = 1 м/с; τ = 1,5 c; h = 10 м.
Определить VB и d.
Вариант 22. Дано: VA = 0; α = 45о; l = 10 м; τ = 2 c. Определить f и уравнение траектории на участке ВС в системе отсчета XВY.
Вариант 23. Дано: f = 0; VA = 0; l = 9,81 м; τ = 2 с; h = 20 м. Оп-
ределить α и Т.
Вариант 24. Дано:VA = 0; α = 30о; f = 0,2; l = 10 м; d = 12 м. Оп-
ределить τ и h.
Вариант 25. Дано: VA = 0; α = 30о; f = 0,2; l = 6 м; h = 4,5 м. Оп-
ределить VC и τ.
38

Варианты 26 – 30 (рис. 1.14)
Рис. 1.14
Имея в точке А скорость VA, тело движется по горизонтальному участку АВ длиной l в течение τ секунд. Коэффициент трения скольжения по плоскости равен f. Со скоростью VB тело в точке В покидает плоскость и попадает в точку С со скоростью VC, находясь в воздухе Т секунд.
При решении задачи принять тело за материальную точку; сопротивление воздуха не учитывать.
Вариант 26. Дано: VA = 7 м/с; f = 0,2; l = 8 м; h = 20 м. Опреде-
лить VC и d.
Вариант 27. Дано: VA = 4 м/с; f = 0,1; τ = 2 c; d = 2 м. Опреде-
лить VB и h.
Вариант 28. Дано: VB = 3 м/с; f = 0,3; l = 3 м; h = 5 м. Опреде-
лить VA и Т.
Вариант 29. Дано: VA = 3 м/с; VB = 1 м/с; l = 2,5 м; h = 20 м. Оп-
ределить f и d.
Вариант 30. Дано: f = 0,25; l = 4 м; d = 3 м; h = 5 м. Определить
VA и τ.
39

1.13.Пример выполнения курсового задания Д 1
Вобщем случае система сил, действующая на материальную точку, может быть постоянной или зависеть от времени t, положения
впространстве, скорости и т. д. В связи с этим интегрирование дифференциальных уравнений движения точки имеет свою специфику. В курсовом задании Д 1 система сил, действующая на точку, постоянна. Рассмотрим пример выполнения этого задания.
Условие задания.
Тело движется из точки А по участку АВ (длиной l) наклонной плоскости, составляющей угол α с горизонтом. Его начальная скорость VA. Коэффициент трения скольжения равен f. Через τ секунд тело в точке В со скоростью VB покидает наклонную плоскость и падает на горизонтальную плоскость в точку С со скоростью VC; при этом оно находится в воздухе Т секунд (рис. 1.15).
При решении задачи принять тело за материальную точку и не учитывать сопротивление воздуха.
Y1
X1
Рис. 1.15
Дано: VA = 1 м/с; α = 30о; f = 0,2; l = 6 м; h = 4,5 м. Определить VC и τ.
40