

kotrolnaya_teoreticheskaya_mekhanika_dinamika
.pdfРис. 5.7
Так как проекция векторной производной на любую ось равна производной от ее проекции, то, проецируя последнее векторное равенство на координатные оси системы отсчета OXYZ, получим:
dLоx/dt = ΣMоx(FiE) + ΣMоx(REi ) + ΣMоx(RiJ ); dLоy/dt = ΣMоy(FiE ) + ΣMоy(REi ) + ΣMоy(RiJ ); dLоz/dt = ΣMоz(FiE ) + ΣMоz(REi ) + ΣMоz(RiJ ).
Производная по времени от момента количества движения материальной точки механической системы относительно некоторой неподвижной оси равна алгебраической сумме моментов сил, действующих на точку, относительно этой же оси.
Следствия из теоремы
1. Если линия действия равнодействующей (Р=ΣFiE +ΣREi +ΣRiJ ) приложенных к материальной точке сил все время проходит через некоторый неподвижный центр, то момент количества движения материальной точки относительно этого центра остается постоянным.
121

Действительно, если ΣM0(FiE ) + ΣM0(REi ) + ΣM0(RiJ ) = 0, то dL0/dt = 0 и, следовательно, L0 = const.
Примером, иллюстрирующим это следствие, может служить движение материальной точки под действием центральной силы
(рис. 5.8).
Рис. 5.8
Центральная сила – сила, линия действия которой постоянно проходит через некоторую точку, неподвижную в данной системе отсчета и называемую центром силы.
Покажем, что линия действия равнодействующей силы Р постоянно проходит через центр О. Тогда главный момент М0 актив-
ных сил FiE , реакций REi внешних связей и внутренних сил RiJ равен нулю:
М0 = ΣM0(FiE ) + ΣM0(REi ) + ΣM0(RiJ ) = 0.
Отсюда следует, что L0 = const.
Из следствия 1 вытекает, что плоскость, в которой находятся вектор mV количества движения точки и центр О, не изменяет своего положения, т. е. траектория лежит в одной плоскости.
2. Если момент равнодействующей приложенных к материальной точке активных сил, реакций внешних связей и внутренних сил относительно некоторой оси все время равняется нулю, то момент количества движения материальной точки относительно этой оси остается постоянным.
122

Если, например, Mox(P) = ΣMоx(FiE ) + ΣMоx(REi ) + ΣMоx(RiJ ) = 0, то dLоx/dt = 0 и, следовательно, Lox = const.
5.3.3. Кинетический момент механической системы относительно центра и оси
Кинетический момент или главный момент количеств движения механической системы относительно данного центра – величина, равная сумме моментов количеств движения всех точек механической системы относительно этого центра.
Момент количества движения каждой материальной точки системы (рис. 5.9) относительно центра О определяется по формуле
Liо = Σri×miVi.
Кинетический момент механической системы относительно центра О равен геометрической сумме моментов количеств движения материальных точек системы:
Lо = ΣLiо.
Рис. 5.9
Кинетический момент или главный момент количеств движения механической системы относительно оси –
величина, равная сумме моментов количеств движения всех точек механической системы относительно этой оси.
123
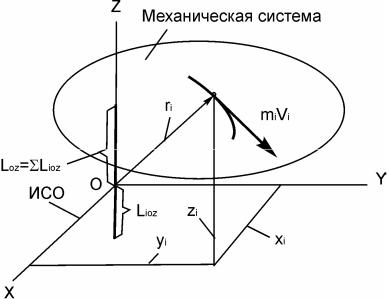
Определим кинетический момент механической системы относительно оси OZ (рис. 5.10).
Рис. 5.10
Момент количества движения Lioz каждой точки системы относительно оси вращения OZ определяется по формуле
Lioz = mi yi·xi – mi xi·yi.
Кинетический момент механической системы относительно оси OZ вращения равен
Lоz = ΣLiоz.
Аналогичным образом определяются кинетические моменты механической системы относительно осей вращения OX, OY.
5.3.4. Теорема об изменении кинетического момента механической системы
Рассмотрим движение неизменяемой механической системы под действием активных сил FiE , реакций REi внешних связей и внут-
ренних сил RiJ (рис. 5.11).
Выберем некоторый неподвижный центр О и определим изменение момента количества движения i-й точки относительно этого центра:
dLiо/dt = ΣMо(FiE ) + ΣMо(REi ) + ΣMо(RiJ ),
где i изменяется от 1 до n.
124

Просуммируем полученные n уравнений.
ΣdLiо/dt = dLо/dt = ΣMо(FiE ) + ΣMо(REi ) + ΣMо(RiJ ),
где Lо – вектор кинетического момента механической системы относительно центра О.
Рис. 5.11
Как известно, для неизменяемой механической системы геометрическая сумма внутренних сил равна нулю (ΣRiJ = 0). Отсюда следует, что и геометрическая сумма моментов этих сил относительно любого центра равна нулю. Приняв за такой центр точку О, имеем ΣM0(RiJ ) = 0. Тогда получим
dL0/dt = ΣM0(FiE ) + ΣM0(REi ).
Это равенство выражает теорему об изменении кинетического момента механической системы.
Производная по времени от кинетического момента механической системы относительно некоторого неподвижного центра равна геометрической сумме моментов приложенных к системе активных сил и реакций внешних связей относительно того же центра.
Последнему векторному равенству соответствуют три равенства в проекциях на оси координат:
dLоx/dt = ΣMоx(FiE ) + ΣMоx(REi );
125
dLоy/dt = ΣMоy(FiE ) + ΣMоy(REi ); dLоz/dt = ΣMоz(FiE ) + ΣMоz(REi ),
где Lоx, Lоy, Lоz – кинетические моменты механической системы относительно координатных осей; ΣMоx(FiE ), ΣMоy(FiE ), ΣMоz(FiE ) – суммы моментов активных сил относительно координатных осей; ΣMоx(REi ), ΣMоy(REi ), ΣMoz(REi ) – суммы моментов реакций внешних связей относительно координатных осей.
Производная по времени от кинетического момента механической системы относительно некоторой оси равна сумме моментов приложенных к системе активных сил и реакций внешних связей относительно той же оси.
Следствия из теоремы
1. Если геометрическая сумма моментов, приложенных к системе активных сил и реакций внешних связей относительно некоторого неподвижного центра, остается все время равной нулю, то кинетический момент механической системы относительно этого центра остается постоянным.
Если ΣM0(FiE ) + ΣM0(REi ) = 0, то dL0/dt = 0 и, следовательно,
L0 = const.
2. Если алгебраическая сумма моментов, приложенных к механической системе активных сил и реакций внешних связей относительно некоторой оси, остается все время равной нулю, то кинетический момент механической системы относительно этой же оси остается постоянным.
Действительно, например, если ΣMоx(FiE ) + ΣMоx(REi ) = 0, то dLоx/dt = 0 и, отсюда следует, что Lоx = const.
Следствия из теоремы об изменении кинетического момента механической системы выражают закон сохранения кинетиче-
ского момента механической системы.
126
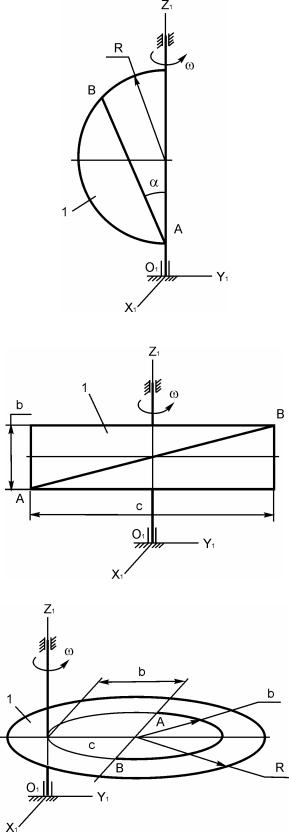
5.3.5. Варианты курсового задания Д 3 «Применение теоремы об изменении кинетического момента к определению угловой скорости твердого тела»
Тело Н (тело 1) массой m1 вращается вокруг вертикальной оси O1Z1 с постоянной угловой скоростью ω0; при этом в точке О желоба АВ тела 1 на расстоянии АО от точки А, отсчитываемом вдоль желоба, находится материальная точка К массой m2. В некоторый момент времени (t0 = 0) на систему начинает действовать пара сил с моментом Mz = Mz(t). При t = τ действие пары сил прекращается.
Определить угловую скорость ωτ тела 1 в момент t = τ. Тело 1 вращается по инерции с угловой скоростью ωτ.
В некоторый момент времени t1 = 0 (t1 – новое начало отсчета времени) точка К (самоходный механизм) начинает относительное движение из точки О вдоль желоба АВ (в направлении от А к В) по закону ОК = s = s(t1).
Определить угловую скорость ωτ тела 1 при t1 = T.
Тело 1 рассматривать как однородную пластинку. Расчетные схемы механизмов и необходимые для решения данные приведены в табл. 5.1.
127

|
|
Таблица 5.1 |
|
|
|
Номер |
Расчетная схема механизма |
Исходные данные |
вари- |
|
|
анта |
|
|
1 |
2 |
3 |
|
|
m1 = 32 кг; |
|
|
m2 = 10 кг; |
|
|
ω0 = – 1 рад/с; |
|
|
b = 1, м; |
1 |
|
с = 1, 5 м; |
|
|
R = 1, 2 м; |
|
|
АО = πR/6 м; |
|
|
Mz = – 29,6t2 Н·м; |
|
|
τ = 3 с; |
|
|
ОК = (5πR/12)t1 м; |
|
|
Т = 1 с |
|
|
|
|
|
m1 = 200 кг; |
|
|
m2 = 60 кг; |
|
|
ω0 = – 2 рад/с; |
|
|
R = 2 м; |
2 |
|
α = 120о; |
|
АО = 0,866 м; |
|
|
|
Mz = 101 Н·м; |
|
|
τ = 5 с; |
|
|
ОК = 1,732(t1)2 м; |
|
|
Т = 1 с |
|
|
|
|
|
m1 = 120 кг; |
|
|
m2 = 40 кг; |
|
|
ω0 = 0 рад/с; |
3 |
|
b = 2 м; |
|
АО = 0 м; |
|
|
|
Mz = 120t Н·м; |
|
|
τ = 4 с; |
|
|
ОК=(1,414/4)(t1)2 м; |
|
|
Т = 2 с |
|
|
|
|
128 |
|
|
|
Продолжение табл..5.1 |
|
|
|
|
|
1 |
2 |
|
3 |
|
|
|
m1 = 16 кг; |
|
|
|
m2 = 5 кг; |
|
|
|
ω0 = – 3 рад/с; |
|
|
|
R = 1 м; |
|
|
|
α = 30о; |
4 |
|
|
АО = 0,4 м; |
|
|
|
Mz = 21t Н·м; |
|
|
|
τ = 2 с; |
|
|
|
ОК=0,6t1 м; |
|
|
|
Т = 2 с |
|
|
|
|
|
|
|
m1 = 66 кг; |
|
|
|
m2 = 10 кг; |
|
|
|
ω0 = 1,5 рад/с; |
|
|
|
b = 2 м; |
5 |
|
|
c = 1,5 м; |
|
|
|
АО = 0 м; |
|
|
|
Mz = 15t0,5 Н·м; |
|
|
|
τ = 4 с; |
|
|
|
ОК=0,5t1 м; |
|
|
|
Т = 2,5 с |
|
|
|
|
|
|
|
m1 = 160 кг; |
|
|
|
m2 = 80 кг; |
|
|
|
ω0 = – 1,25 рад/с; |
|
|
|
b = 1,5 м; |
|
|
|
R = 2,5 м; |
6 |
|
|
α = 30о; |
|
|
|
АО = πb/6 м; |
|
|
|
Mz = – 700t Н·м; |
|
|
|
τ = 3 с; |
|
|
|
ОК=(5πb/18)(t1)2 м; |
|
|
|
Т = 1 с |
|
|
|
|
|
|
129 |
|

|
|
Продолжение табл..5.1 |
|
|
|
|
|
1 |
2 |
|
3 |
|
|
|
m1 = 300 кг; |
|
|
|
m2 = 50 кг; |
|
|
|
ω0 = – 2 рад/с; |
|
|
|
b = 1,6 м; |
7 |
|
|
c = 1 м; |
|
|
|
R = 0,8 м; |
|
|
|
АО = 0 м; |
|
|
|
Mz = 968 Н·м; |
|
|
|
τ = 1 с; |
|
|
|
ОК=(πR/2)(t1)2 м; |
|
|
|
Т = 1 с |
|
|
|
m1 = 80 кг; |
|
|
|
m2 = 20 кг; |
|
|
|
ω0 = 0 рад/с; |
|
|
|
b = 1,2 м; |
|
|
|
R = 2 м; |
8 |
|
|
АО = πb/2 м; |
|
|
|
Mz = 240t0,5 Н·м; |
|
|
|
τ = 4 с; |
|
|
|
ОК=(πb/4)t1 м; |
|
|
|
Т = 2 с |
|
|
|
|
|
|
|
m1 = 20 кг; |
|
|
|
m2 = 5 кг; |
|
|
|
ω0 = 5 рад/с; |
|
|
|
b = 1,2 м; |
9 |
|
|
R = 0,4 м; |
|
|
|
α = 45о; |
|
|
|
АО = πR/4 м; |
|
|
|
Mz = – 29,2t Н·м; |
|
|
|
τ = 3 с; |
|
|
|
ОК=(3πR/4)(t1)2 м; |
|
|
|
Т = 1 с |
|
|
|
|
130