

kotrolnaya_teoreticheskaya_mekhanika_dinamika
.pdf
|
|
Продолжение табл..5.3 |
|
|
|
|
|
1 |
2 |
|
3 |
|
|
|
m1 = 12 кг; |
|
|
|
b = 0,30 м; |
19 |
|
|
с = 0,25 м; |
|
|
|
d = 0,35 м; |
|
|
|
ω = 8 рад/с |
|
|
|
|
|
|
|
m1 = 40 кг; |
|
|
|
R = 0,30 м; |
20 |
|
|
M = 3,0 H·м; |
|
|
|
t1 = 4 c; |
|
|
|
φ0 = 0о; |
|
|
|
ω0 = 8 рад/с |
|
|
|
|
|
|
|
m1 = 100 кг; |
|
|
|
m2 = 40 кг; |
21 |
|
|
m3 = 15 кг; |
|
|
|
M = 124 H·м; |
|
|
|
R2 = 0,2 м; |
|
|
|
b = 0,30 м |
|
|
|
|
201

|
|
Продолжение табл..5.3 |
|
|
|
|
|
1 |
2 |
|
3 |
|
|
|
m1 = 80 кг; |
|
|
|
m2 = 20 кг; |
22 |
|
|
R2 = 0,10 м; |
|
|
М = 120 Н·м |
|
|
|
|
|
|
|
|
m1 = 10 кг; |
|
|
|
m2 = 25 кг; |
|
|
|
b = 0,30 м; |
23 |
|
|
с = 0,20 м; |
|
|
|
d = 0,35 м; |
|
|
|
ω = 10 рад/с |
|
|
|
|
|
|
|
m1 = 10 кг; |
|
|
|
m2 = 25 кг; |
|
|
|
b = 0,20 м; |
24 |
|
|
с = 0,35 м; |
|
|
|
d = 0,30 м; |
|
|
|
ω = 12 рад/с |
|
|
|
|
|
|
202 |
|

|
|
Продолжение табл..5.3 |
|
|
|
|
|
1 |
2 |
|
3 |
|
|
|
m1 = 10 кг; |
|
|
|
m2 = 25 кг; |
25 |
|
|
R3 = 0,30 м; |
|
|
|
r3 = 0,20 м |
|
|
|
|
|
|
|
m1 = 80 кг; |
|
|
|
m2 = 20 кг; |
26 |
|
|
R3 = 0,30 м; |
|
|
|
r3 = 0,20 м; |
|
|
|
b = 0,20 м; |
|
|
|
c = 0,30 м |
|
|
|
|
|
|
|
m1 = 50 кг; |
|
|
|
m2 = 20 кг; |
27 |
|
|
R3 = 0,25 м; |
|
|
|
r3 = 0,15 м; |
|
|
|
b = 0,20 м |
|
|
|
|
203

|
|
Окончание табл. 5.3 |
|
|
|
|
|
1 |
2 |
|
3 |
|
|
|
m1 = 30 кг; |
28 |
|
|
m2 = 15 кг; |
|
|
P = 300 H; |
|
|
|
|
R3 = 0,25 м |
|
|
|
|
|
|
|
m1 = 10 кг; |
|
|
|
m2 = 25 кг; |
29 |
|
|
m3 = 25 кг; |
|
|
b = 0,20 м; |
|
|
|
|
с = 0,35 м; |
|
|
|
ω = 8 рад/с |
|
|
|
|
|
|
|
m1 = 10 кг; |
30 |
|
|
m2 = 25 кг; |
|
|
b = 0,50 м; |
|
|
|
|
с = 0,15 м; |
|
|
|
ω = 16 рад/с |
|
|
|
|
|
|
204 |
|

5.6.5.Пример выполнения курсового задания Д 5
Вкурсовом задании Д 5 требуется определить реакции внешних связей, наложенных на механическую систему в следующих случаях: в произвольный момент времени; в фиксированный момент времени t1; в тот момент времени, когда угол поворота тела равен значению φ1.
Рассмотрим последовательно эти случаи.
Случай 1.
Однородный стержень 1 длиной l и точечный груз 2, закрепленный на конце стержня, совершают вращательное движение относительно оси OZ с постоянной угловой скоростью ω (рис. 5.41).
Рис. 5.41
Дано: m1 = 20 кг; m2 = 10 кг; ОА = l = 1 м; α = 30о. Определить реакции связи в точке О.
Решение.
Запишем формулу, выражающую принцип Даламбера для механической системы в векторном виде:
ΣFiE+ ΣREi + ΣФi = 0,
205
где ΣFiE – геометрическая сумма активных сил; ΣREi – геометриче-
ская сумма реакций внешних связей, наложенных на механическую систему; ΣФi – геометрическая сумма сил инерции.
Согласно этому принципу на механическую систему действуют активные силы G1, G2, реакции Y0, Z0 внешней связи и силы инерции Ф1, Ф2. Применительно к рассматриваемой задаче принцип Даламбера выражается формулой
G1 + G2 + Y0 + Z0 + Ф1 + Ф2 = 0.
Покажем эти силы на рис. 5.41. Силы G1, G2 поместим в центрах С1, С2 масс тел 1 и 2.
Используя исходные данные задачи, запишем формулы для определения модулей активных сил и сил инерции:
G1 = m1g; G2 = m2g.
Так как механическая система вращается с постоянной угловой скоростью ω, то угловое ускорение ε = dω/dt = 0 и, следовательно, ускорения ac1, ac2 центров масс тел 1 и 2 соответственно равны:
ac1 = ac1ω = ω2·0,5 l sinα; ac2 = ac2ω = ω2 l sinα,
где ac1ω , ac2ω – центростремительные ускорения центров масс тел
рассматриваемой механической системы. Тогда имеем:
Φ1 = m1ac1 = m1ac1ω = m1(ω2·0,5 l sinα); Φ2 = m1ac2 = m1ac2ω = m2(ω2·l sinα).
Сила инерции Ф1 тела 1 приложена в точке D на расстоянии ОD = 2 l/3, так как эпюра распределения элементарных сил инерции тела 1 имеет форму треугольника.
Согласно рис. 5.41 на рассматриваемую конструкцию действует плоская произвольная система сил. Принцип Даламбера в этих
условиях выражается системой трех уравнений. |
|
|||||||||
|
ΣFE |
|
+ ΣRioyE |
+ ΣФ |
ioy |
= 0; |
|
(1) |
||
|
ioy |
|
|
|
|
|
|
|
||
|
ΣFE |
+ ΣRE + ΣФ |
ioz |
= 0; |
|
(2) |
||||
|
ioz |
|
|
ioz |
|
|
|
|
||
|
ΣM (FE ) + ΣM (RE) + ΣM |
(Ф ) = 0, |
(3) |
|||||||
|
О |
|
|
i |
О |
|
i |
О |
i |
|
где ΣM (FE ), ΣM (RE), ΣM |
|
(Ф ) – суммы моментов соответственно |
||||||||
О i |
О i |
О |
i |
|
|
|
|
|
|
|
активных сил, реакций внешних связей и сил инерции относительно
точки О. |
|
Преобразуем последние уравнения к следующему виду: |
(11) |
Y0 – Φ1 – Φ2 = 0; |
|
– G1 – G2 + Z0 = 0; |
(21) |
206 |
|

G1·0,5lsinα + G2·lsinα – Φ1·(2l/3)cosα – Φ2·lcosα = 0. |
(31) |
При использовании условий задачи эти уравнения принимают |
|
вид: |
|
Y0 – m1(ω2·0,5lsinα) – m2(ω2·lsinα); |
(111) |
– m1g – m2g + Z0 = 0; |
(211) |
m1g·0,5lsinα + m2g·lsinα – |
|
– m1(ω2·0,5lsinα·(2l/3)cosα – m2(ω2·lsinα)·lcosα = 0. |
(311) |
В трех уравнениях (111), (211), (311) содержатся три неизвестные величины: Y0 , Z0, ω. Решим эти уравнения.
Из уравнения (311) имеем
ω= (glsin (0,5m1 + m2)/(lsin lcos (0,333m1 + m2)))0,5 =
=(g(0,5m1 + m2)/(lcos (0,333m1 + m2)))0,5 =
=(9,81(0,5(20) + 10)/(1(0,866)(0,333(20) + 10)))0,5 = 3,686 рад/с.
Из уравнения (211) следует, что
Z0 = g(m1 + m2) = 9,81(20 + 10) = 294,300 H.
Из уравнения (111) получим
Y0 = ω2lsinα(0,5m1+m2) = 3,6862·1·0,5(0,5·20+10) = 135,939 H.
Таким образом, ответы на вопросы (Y0 =?, Z0 =?), поставленные в курсовом задании Д 5, получены.
Случай 2.
Однородный стержень массой m из состояния покоя приходит во вращательное движение относительно вертикальной оси OZ по гладкой горизонтальной плоскости под действием пары сил с моментом М (рис. 5.42).
Рис. 5.42
207
Определить реакции внешней связи в момент времени t1.
Дано: m = 10 кг; ОА = l = 1 м; φ0 = 0; ω0 = 0; M = 10t; t1 = 1 c.
Решение.
Запишем формулу, выражающую принцип Даламбера в векторном виде:
ΣFiE+ ΣREi + ΣФi = 0,
где ΣFiE – геометрическая сумма активных сил; ΣREi – геометрическая сумма реакций внешних связей, наложенных на механическую систему; ΣФi – геометрическая сумма сил инерции.
Согласно этому принципу на стержень действуют активная сила G (сила тяжести), активная пара сил с моментом М, реакции X0, Y0 цилиндрического шарнира в точке О, реакция N гладкой горизонтальной поверхности OXY, центробежная Фω и вращательная Фε силы инерции и момент МΦ сил инерции. Силы G и N на рис. 5.42 не показаны, так как рисунок приведен в ортогональных проекциях.
Стержень на рис. 5.42 изображен в произвольный момент времени, при этом предполагается, что он вращается с угловой скоростью ω в сторону возрастания угловой координаты φ с угловым ускорением ε. Исходя из этого предположения, силы Фω, Фε инерции и момент МΦ сил инерции направлены так, как это показано на рис. 5.42.
Применительно к рассматриваемой задаче принцип Даламбе-
ра выражается формулой
G + X0 + Y0 + N + Фω + Фε = 0.
Модули Фω, Фε сил инерции и модуль МΦ момента сил инерции определим по формулам:
Φω = m·aω |
= m(ω2l/2); |
Φε = m·aε |
= m(εl/2); |
c |
|
c |
|
MΦ = Jczε = (ml2/12)ε.
Поскольку стержень движется по гладкой горизонтальной поверхности, то силы G и N на это движение не влияют и, следовательно, их можно исключить из рассмотрения. В этих условиях принцип Даламбера выражается системой трех уравнений:
ΣFE |
+ ΣRE |
+ ΣФ |
iox |
= 0; |
|
(1) |
|
iox |
iox |
|
|
|
|
|
|
ΣFE |
+ ΣRioyE + ΣФ |
ioy |
= 0; |
|
(2) |
||
ioy |
|
|
|
|
|
||
ΣM (FE ) + ΣM (RE) + ΣM |
(Ф ) = 0, |
(3) |
|||||
О |
i |
О i |
О |
i |
|
||
где ΣMО(FiE ), ΣMО(REi ), ΣMО(Фi) – суммы моментов соответственно активных сил, реакций внешних связей и сил инерции относительно произвольной точки О.
Применительно к рассматриваемой задаче имеем:
208
XO + Φωcosφ + Φεsinφ = 0; |
(11) |
YO + Φωsinφ + Φεcosφ = 0; |
(21) |
M – Φε(l/2) – MФ = 0. |
(31) |
При использовании условий задачи эти уравнения приобрета- |
|
ют следующий вид: |
|
XO + m(ω2l/2)cosφ + m(εl/2)sinφ = 0; |
(111) |
YO + m(ω2l/2)sinφ + m(εl/2)cosφ = 0; |
(211) |
M – m(εl/2)(l/2) – (ml2/12)ε = 0. |
(311) |
Следует отметить, что угловая скорость ω, угловое ускорение ε и угол φ поворота зависят от времени t (ω = f1(t); ε = f2(t); φ = f3(t)). В момент времени t1 они будут иметь соответствующие значения ω1,
ε1, φ1. Внесем эти значения в последние уравнения. |
(1111) |
XO + m((ω1)2l/2)cosφ1 + m(ε1l/2)sinφ1 = 0; |
|
YO + m((ω1)2l/2)sinφ1 + m(ε1l/2)cosφ1 = 0; |
(2111) |
M – m(ε1l/2)(l/2) – (ml2/12)ε1 = 0. |
(3111) |
Нетрудно заметить, что в трех уравнениях содержатся следующие неизвестные величины: X0, Y0, ω1, ε1, φ1, следовательно, для успешного решения задачи требуется получить дополнительные уравнения. Для этого дифференциальное уравнение (3111) представим в следующем виде:
(ml2/3)ε = 10t. |
|
Преобразовав это уравнение, получим |
|
ε = dω/dt = (30/ml2)t. |
(4) |
Дважды проинтегрировав последнее уравнение, получим:
ω= (30/(ml2))(t2/2) + C1 = (15/(ml2))t2 + C1;
φ= (15/(ml2))(t3/3) + C1t + C2 = (5/(ml2))t3 + C1t + C2,
где С1, С2 – постоянные интегрирования, определяемые по начальным условиям движения.
Поскольку ω0 = 0 и φ0 = 0, то С1 = 0 и С2 = 0. Тогда справедливы выражения:
ω = (15/(ml2))t2; |
(5) |
φ = (5/(ml2))t3. |
(6) |
Если в уравнения (4), (5), (6) подставить значения времени t1, |
|
то получим: |
|
ε1 = (30/(ml2))t1 = (30/(10·12))1 = 3 рад/с; |
|
(41) |
|
ω1 = (15/(ml2))(t1)2 = (15/(10·12))12 = 1,5 рад/с; |
(51) |
φ1 = (5/(ml2))(t1)3 = (5/(10m·12))13 = 0,5 рад. |
|
(61)
Определим значения sinφ1 и cosφ1:
sinφ1 = 0,479; cosφ1 = 0,877.
По известным величинам ε1, ω1, sinφ1, cosφ1 определим реакции X0, Y0 связи:
209
XO = – m((ω1)2l/2)cosφ1 – m(ε1l/2)sinφ1 =
=–10(3,52·1/2)0,877 – 10(1,5·1/2)0,479 = – 57,308 H; YO = – m((ω1)2l/2)sinφ1 + m(ε1l/2)cosφ1 =
=–10(3,52·1/2)0,479 + 10(1,5·1/2)0,877 = – 22,760 H.
Таким образом, ответы на вопросы (X0 = ?, Y0 = ?), поставлен-
ные в курсовом задании Д 5, получены.
Случай 3.
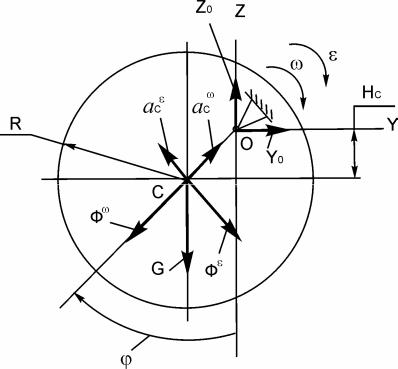
Однородный круг массой m и радиусом R находится в состоянии покоя. В момент времени t0 = 0 ему придали угловую скорость ω0. Определить реакции внешней связи в момент времени, когда угол поворота тела равен значению φ1. На рис. 5.43 круг изображен в произвольный момент времени.
Рис. 5.43
Дано: m = 10 кг; R = 1 м; φ1 = 60о; φ0 = 0о; ω0 = 10 рад/с.
Решение.
Запишем формулу, выражающую принцип Даламбера в векторной форме:
ΣFiE+ ΣREi + ΣФi = 0,
где ΣFiE – геометрическая сумма активных сил; ΣREi – геометриче-
ская сумма реакций внешних связей, наложенных на механическую систему; ΣФi – геометрическая сумма сил инерции.
210