

kotrolnaya_teoreticheskaya_mekhanika_dinamika
.pdfПросуммируем последние выражения и получим
ΣFiE·δSci +ΣREi ·δSci + ΣRiJ·δSci + ΣФi·δSci = 0.
Для движущейся механической системы сумма работ активных сил, реакций внешних связей, внутренних сил и сил инерции, приложенных к ее точкам, на любых возможных перемещениях этой системы равна нулю.
Поскольку на механическую систему наложены идеальные связи, то сумма работ реакций этих связей равна нулю.
ΣREi ·δSci = 0.
Так как рассматривается неизменяемая механическая система, то сумма работ реакций внутренних связей также равна нулю.
ΣRiJ·δSci = 0.
Исходя из того, что ΣREi ·δSci = 0 и ΣRiJ·δSci = 0, получим
ΣFiE·δSci + ΣФi·δSci = 0.
Последнее уравнение называют общим уравнением динами-
ки.
В любой момент времени работа активных сил и сил инерции материальных точек несвободной механической системы с идеальными связями на ее любом возможном перемещении равна нулю.
Общее уравнение динамики (ΣFiE·δSci + ΣФi·δSci = 0) можно преобразовать к следующим видам:
Σ(FiE + ΣФi)δSci = 0;
ΣFiE·δSci·cos(FiE, δSci) + ΣФi·δSci·cos(Фi, δSci) = 0; Σ(FiEоx ·δSiоx + FiEоy ·δSiоy + FiozE ·δSiоz) +
+Σ(Фiоx·δSiоx + Фiоy·δSiоy + Фiоz·δSiоz) = 0; Σ(FiEоx ·δSiоx + FiEоy ·δSiоy + FiozE ·δSiоz) +
+Σ(– mxci ·δSiоx – myci ·δSiоy – zci·δSiоz) = 0,
где FiEоx , FiEоy , FiozE – проекции активных сил на координатные оси; Фiоx, Фiоy, Фiоz – проекции сил инерции на координатные оси; δSiоx, δSiоy, δSiоz – проекции возможных перемещений точек приложения сил на координатные оси, xci , yci , zci – проекции ускорений мате-
риальных точек механической системы на координатные оси. Общее уравнение динамики позволяет составить дифферен-
циальные уравнения движения любой механической системы. Если среди связей системы имеются односторонние, то для
применения общего уравнения динамики необходимо, чтобы воз-
261
можные перемещения системы не разрушали эти связи, а обеспечивали их функциональное назначение.
Для закрепления изложенного теоретического материала рекомендуется выполнить курсовое задание Д 8.
6.4.2. Варианты курсового задания Д 8 «Применение общего уравнения
динамики к исследованию движения механической системы с одной степенью свободы»
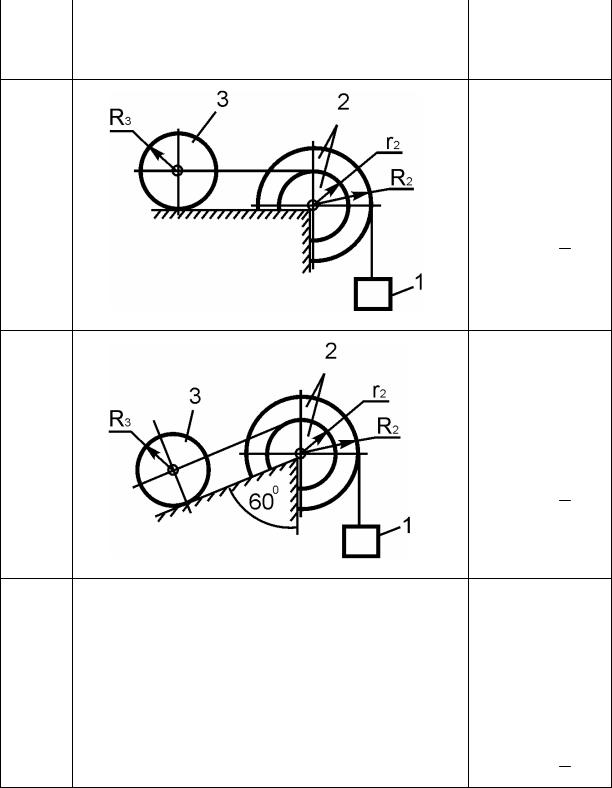
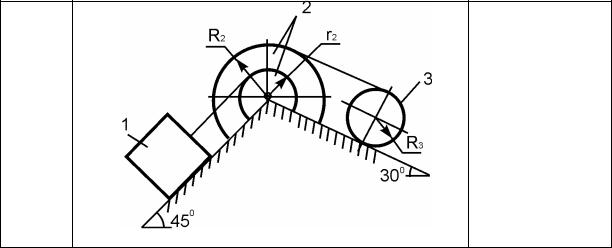
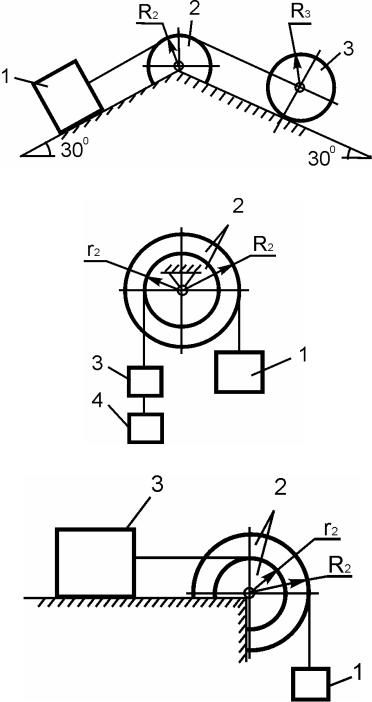
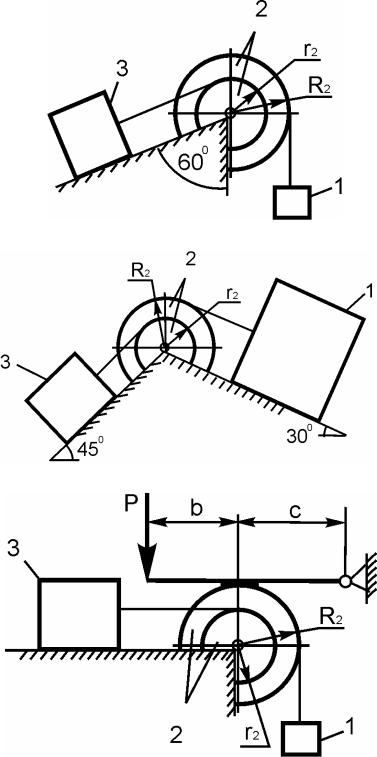
Для заданной механической системы определить ускорения грузов. Массами нитей пренебречь. Трение качения и силы сопротивления в подшипниках не учитывать. Система движется из состояния покоя.
Варианты механических систем и необходимые для решения данные приведены в табл. 5.6.
Блоки и катки, для которых радиусы инерции в табл. 5.6 не указаны, считать сплошными однородными цилиндрами.
Примечания:
Радиусы инерции даны относительно центральных осей,
перпендикулярных плоскости чертежа.
Коэффициенты трения принимать одинаковыми как при скольжении тела по плоскости, так и при торможении колодкой.
В варианте 24 массы четырех колес одинаковы.
262
|
|
Таблица 5.6 |
|
|
|
Номер |
Расчетная схема механизма |
Исходные дан- |
вари- |
|
ные |
анта |
|
|
1 |
2 |
3 |
G1 = G;
G2 = G;
G3 = 3G; 1 r2 = r;
R2 = 2r; R3 = r;
i2x = r 
 2
2
G1 = G;
G2 = G;
G3 = G; 2 r2 = r;
R2 = 2r;
R3 = r; i2x = r 
 2
2
G1 = 3G;
G2 = G;
G3 = G; 3 r2 = r;
R2 = 2r; R3 = r; f = 0,1;
i2x = r 
 2
2
263
264
Продолжение табл..5.6
1 |
2 |
|
3 |
|
|
G1 = G; |
|
|
|
G2 = G; |
|
|
|
G3 = 2G; |
|
4 |
|
R2 = R3 = r; |
|
|
|
f = 0,2 |
|
|
|
|
|
|
|
G1 = 2G; |
|
|
|
G2 |
= G; |
|
|
G3 |
= G; |
5 |
|
G4 |
= G; |
|
|
r2 |
= r; |
|
|
R2 = 3r; |
|
|
|
i2x |
= 2r |
|
|
|
|
|
|
G1 = 2G; |
|
|
|
G2 |
= G; |
|
|
G3 = 2G; |
|
|
|
r2 |
= r; |
6 |
|
R2 = 3r; |
|
|
|
f = 0,1; |
|
|
|
i2x = 2r; |
|
|
|
f = 0,2 |
|
|
|
|
|
|
265 |
|
|
|
|
Продолжение табл..5.6 |
|
|
|
|
|
1 |
2 |
|
3 |
|
|
|
G1 = 2G; |
|
|
|
G2 = G; |
|
|
|
G3 = 2G; |
7 |
|
|
r2 = r; |
|
|
|
R2 = 3r; |
|
|
|
i2x = 2r; |
|
|
|
f = 0,2 |
|
|
|
|
|
|
|
G1 = 2G; |
|
|
|
G2 = G; |
8 |
|
|
G3 = 2G; |
|
|
|
r2 = r; |
|
|
|
R2 = 3r; |
|
|
|
i2x = 2r; |
|
|
|
f = 0,2 |
|
|
|
|
|
|
|
G1 = 2G; |
|
|
|
G2 = G; |
|
|
|
G3 = 2G; |
9 |
|
|
r2 = r; |
|
|
|
R2 = 3r; |
|
|
|
i2x = 2r; |
|
|
|
P = 0,2G; |
|
|
|
f = 0,2 |
|
|
|
|
|
266 |
|
|
|
|
Продолжение табл..5.6 |
|
|
|
|
|
1 |
2 |
|
3 |
|
|
|
G1 = 2G; |
|
|
|
G2 = 2G; |
|
|
|
G3 = G; |
|
|
|
r3 = r; |
10 |
|
|
R3 = 4r; |
|
|
|
i3x = 2r; |
|
|
|
P = G/3; |
|
|
|
f = 0,4 |
|
|
|
|
|
|
|
G1 = 2G; |
|
|
|
G2 = G; |
|
|
|
G3 = 2G; |
|
|
|
G4 = 0,2G; |
11 |
|
|
r2 = r; |
|
|
|
R2 = 3r; |
|
|
|
i2x = 2r; |
|
|
|
f = 0,2 |
|
|
|
|
|
|
|
G1 = 2G; |
|
|
|
G2 = G; |
|
|
|
G3 = 2G; |
12 |
|
|
G4 = 0,2G; |
|
|
|
r2 = r; |
|
|
|
R2 = 3r; |
|
|
|
i2x = 2r; |
|
|
|
f = 0,2 |
|
|
|
|
|
267 |
|
|
Продолжение табл..5.6
1 |
2 |
3 |
G1 = 4G;
G2 = 2G;
G3 = G;
13 G4 = 4G; r2 = 2r3;
R2 = R3;
i2x = r2 
 2 ; i3x = 2r3
2 ; i3x = 2r3
|
G2 = 2G; |
||
|
G3 = G; |
||
|
G4 = 4G; |
||
14 |
r2 = 2r3; |
||
|
R3 = 1,5R2; |
||
|
i2x = r2 |
|
; |
|
2 |
||
|
i3x = 2r3; |
||
|
P = 8G |
||
G1 = 4G;
G2 = G;
G3 = 2G;
G4 = 4G;
15 |
i2x |
= r2 |
2 ; |
|
i3x = 2r3; r2 = 2r3;
R3 = 1,5R2
268
Продолжение табл..5.6
1 |
2 |
3 |
|
G2 = G; |
|||
|
G3 = 2G; |
|||
|
G4 = 4G; |
|||
|
i2x = r2 |
|
; |
|
16 |
2 |
|||
i3x = 2r3; |
||||
|
||||
|
P = 4G; |
|||
|
r2 = 2r3; |
|||
|
R3 = 1,5R2 |
|||
G1 = 2G;
G2 = G;
G3 = G; r2 = r;
17 R2 = 2r; R3 = r;
i2x = r 
 2 ; f = 0,1
2 ; f = 0,1
G1 = 3G;
G2 = 0,2G;
G3 = 0,1G;
G4 = 0,5G; r2 = r;
18 R2 = 2r;
R3 = r; f = 0,4
269
Продолжение табл..5.6
1 |
2 |
3 |
G1 = 4G;
G2 = 0,3G;
G3 = 0,2G;
G4 = 3G; i2x = 2r; 19 i3x = 1,2r; r2 = r; f = 0,1;
R2 = 3r; R3 = 1,2r3; R3 = 1,2r
G1 = 4G;
G2 = 0,2G;
G3 = 0,1G;
G4 = 3G; i2x = 1,6r;
i3x = r 
 2 ; 20 r2 = 1,5r;
2 ; 20 r2 = 1,5r;
f = 0,2;
R2 = 1,2r2; R3 = 2r; r3 = r
G1 = 5G;
G2 = 0,1G;
G3 = 0,2G; r3 = r;
21 R3 = 3r;
R2 = 0,5r;
i3x = r 
 2 ;
2 ;
P = G
270