

kotrolnaya_teoreticheskaya_mekhanika_dinamika
.pdf
|
|
Продолжение табл..5.4 |
|
|
|
|
|
1 |
2 |
|
3 |
|
|
|
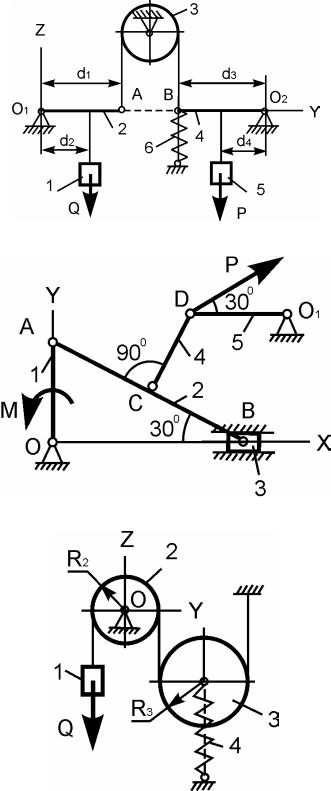
R2 = 40 см; |
|
|
|
r2 = 15 см; |
10 |
|
|
R3 = 20 см; |
|
|
ОА = 100 см; |
|
|
|
|
Q = 2000 H; |
|
|
|
h = 4 см; |
|
|
|
с = ? |
|
|
|
|
|
|
|
ОА = 20 см; |
11 |
|
|
М = 300 Н·м; |
|
|
|
P = ? |
|
|
|
|
12 |
|
|
O1D = 60 см; |
|
|
АО = 20 см; |
|
|
|
|
М = 100 Н·м; |
|
|
|
P = ? |
|
|
|
|
231

|
|
Продолжение табл..5.4 |
|
|
|
|
|
1 |
2 |
|
3 |
|
|
|
ОА = 40 см; |
13 |
|
|
М = 200 Н·м; |
|
|
|
P =? |
|
|
|
|
|
|
|
ОВ = 2ОА; |
|
|
|
Q = 20 H; |
14 |
|
|
с = 25 Н/см; |
|
|
|
h = 3 см; |
|
|
|
P = ? |
|
|
|
|
|
|
|
АС = ОС = ОD; |
15 |
|
|
Q = 3000 H; |
|
|
|
с = 250 Н/см; |
|
|
|
h = 3 см; |
|
|
|
P = ? |
|
|
|
|
232
|
|
Продолжение табл..5.4 |
|
|
|
|
|
1 |
2 |
|
3 |
|
|
|
d1 = 100 см; |
|
|
|
d2 = 60 см; |
|
|
|
d3 = 80 см; |
16 |
|
|
d4 = 40 см; |
|
|
|
Q = 5000 H; |
|
|
|
c = 100 Н/см; |
|
|
|
h = 4 см; |
|
|
|
P = ? |
|
|
|
|
|
|
|
ОА = 20 см; |
17 |
|
|
М = 200 Н·м; |
|
|
|
P = ? |
|
|
|
|
|
|
|
Q = 200 H; |
|
|
|
P = 200 H; |
18 |
|
|
с = 100 H/см; |
|
|
|
h = ? |
|
|
|
|
233

|
|
Продолжение табл..5.4 |
|
|
|
|
|
1 |
2 |
|
3 |
|
|
|
R1 = 20 см; |
19 |
|
|
R2 = 30 см; |
|
|
ОА = 25 см; |
|
|
|
|
М = 100 Н·м; |
|
|
|
P = ? |
|
|
|
|
|
|
|
ОА=АВ =50 см; |
|
|
|
АС = 50 см; |
20 |
|
|
Q = 50 H; |
|
|
|
P = 100 H; |
|
|
|
M = ? |
|
|
|
|
|
|
|
ОА=АВ= 25 см; |
21 |
|
|
АС=DC= 25 см; |
|
|
|
Р = 200 Н; |
|
|
|
M = ? |
|
|
|
|
234

|
|
|
Продолжение табл..5.4 |
|
|
|
|
|
|
1 |
2 |
|
|
3 |
22 |
|
|
|
ОА = 40 см; |
|
|
|
|
М = 400 Н/см; |
|
|
|
|
P = ? |
|
|
|
|
|
|
|
|
|
ОС =2ОА = 1 м; |
|
|
|
|
Р = 200 Н; |
23 |
|
|
|
М = 50 Н·м; |
|
|
|
|
с = 50 Н/см; |
|
|
|
|
h = ? |
|
|
|
|
|
|
|
|
|
AD = OD = OB; |
24 |
|
|
|
P = 250 H; |
|
|
|
|
c = 150 H/см; |
|
|
|
|
h = 2,5 см; |
|
|
Q |
|
|
|
|
|
Q = ? |
|
|
|
|
|
|
|
|
|
|
|
235

|
|
Продолжение табл..5.4 |
|
|
|
|
|
1 |
2 |
|
3 |
|
|
|
OD=DB=0,8AO; |
25 |
|
|
Q = 400 H; |
|
|
|
c = 120 H/см; |
|
|
|
h = 3 см; |
|
|
|
P = ? |
|
|
|
|
|
|
|
ОА = 25 см; |
26 |
|
|
Р = 500 Н; |
|
|
|
М = 120 Н·м; |
|
|
|
h = 2 см; |
|
|
|
с = ? |
|
|
|
|
|
|
|
ОВ = АВ; |
27 |
|
|
c = 180 Н/см; |
|
|
|
h = 2 см; |
|
|
|
P = ? |
|
|
|
|
236

|
|
Окончание табл. 5.3 |
|
|
|
|
|
1 |
2 |
|
3 |
|
|
|
ОВ = (5/4)ОА; |
28 |
|
|
Р = 450 Н; |
|
|
|
Q = ? |
|
|
|
|
|
|
|
AO = 30 см; |
29 |
|
|
BD = O1D; |
|
|
|
M = 120 H·м; |
|
|
|
с = 100 Н/см; |
|
|
|
h = ? |
|
|
|
|
|
|
|
R2 = 36 см; |
|
|
|
r2 = 15 см; |
30 |
|
|
R3 = 20 см; |
|
|
|
r3 = 10 см; |
|
|
|
Р = 600 Н; |
|
|
|
Q =? |
|
|
|
|
237

6.3.2. Пример выполнения курсового задания Д 6
При выполнении курсовых заданий Д 6, Д 7 необходимо учесть следующие замечания.
1. Если не все связи, наложенные на рассматриваемую механическую систему, являются идеальными, например, имеются шероховатые поверхности (неидеальные связи), то к активным нагрузкам следует добавить силы трения. Таким приемом силы трения переносят в разряд активных сил и, следовательно, шероховатую поверхность можно рассматривать как идеальную связь (рис. 6.14).
Рис. 6.14
Таким образом, при решении задачи рис. 6.14,а и рис. 6.14,б эквивалентны.
2. Если требуется определить какую-либо реакцию идеальной связи, то, применив аксиому связей, отбрасывают соответствующую связь и заменяют ее реакцией связи. Таким образом, исходная связь заменяется другой связью, допускающей возможные перемещения. Тем самым искомая реакция переносится в разряд активных сил. Этот прием решения задач является черезвычайно эффективным, так как искомая реакция связи непосредственно определяется из уравнения, выражающего принцип возможных перемещений.
На рис. 6.15, 6.16 приведены некоторые варианты определения реакций внешних связей для механических систем.
В исходном положении (см. рис. 6.15) на механическую систему, состоящую из двух тел, в точке А наложена связь – жесткая заделка. Снимем ограничение на перемещение тела 1 в горизонтальном направлении, сохранив остальные ограничения. Варианты такой замены показаны на рис. 6.15,б, 6.15,в.
При таких заменах тело 1 может совершить только поступательное движение, параллельное координатной оси ОХ. Если задать возможное перемещение δSA точке А механической системы,
238

то ее точки В и С получат возможные перемещения δSВ, δSС, зависящие от δSA.
Рис. 6.15
При определении реактивного момента МА для механической системы, приведенной на рис 6.15, жесткую заделку заменяют шарнирно неподвижной опорой (см. рис. 6.16).
Рис. 6.16
При такой замене тело 1 может совершать вращательное движение. Зададим этому телу возможное угловое перемещение δφ1. Точки В и С механической системы получат линейные возможные перемещения δSВ, δSС, зависящие от перемещения δφ1.
Задачи на применение принципа возможных перемещений рекомендуется решать по следующему алгоритму.
1.Изобразить рассматриваемую механическую систему на рисунке в соответствующем масштабе.
2.Приложить к механической системе активные нагрузки.
3.При наличии неидеальных связей добавить соответствующие реакции связей (например, силы трения).
4.Для определения реакции связи эту реакцию перенести в разряд активных сил путем замены существующей связи на
239

связь, допускающую возможное перемещение в направлении, как правило, противоположном направлению определяемой реакции связи.
5.Дать возможное перемещение одной из точек механической системы и выразить возможные перемещения точек приложения сил в зависимости от заданного возможного перемещения.
6.Вычислить сумму работ активных сил на возможных перемещениях их точек приложения и приравнять эту сумму нулю.
7.Решив составленное уравнение, определить искомую вели-
чину.
Пример.
На рис. 6.17 изображена механическая система, находящаяся в равновесии. Определить модуль силы F, приложенной в точке В рычага 1.
Рис. 6.17
Дано: G5 = 100 H; α = 30о; d1 = 1 м; b1 = 0,5 м; d3 = 0,8 м; b3 = 0,5 м.
Решение.
Согласно рис. 6.17 механическая система, содержащая пять тел, имеет одну степень свободы. Наложенные на эту систему в точках С и К связи (шарнирно-неподвижные опоры) являются иде-
240