

Задание № 5д
Тема проекта: Гидроцилиндр.
Кинематическая схема
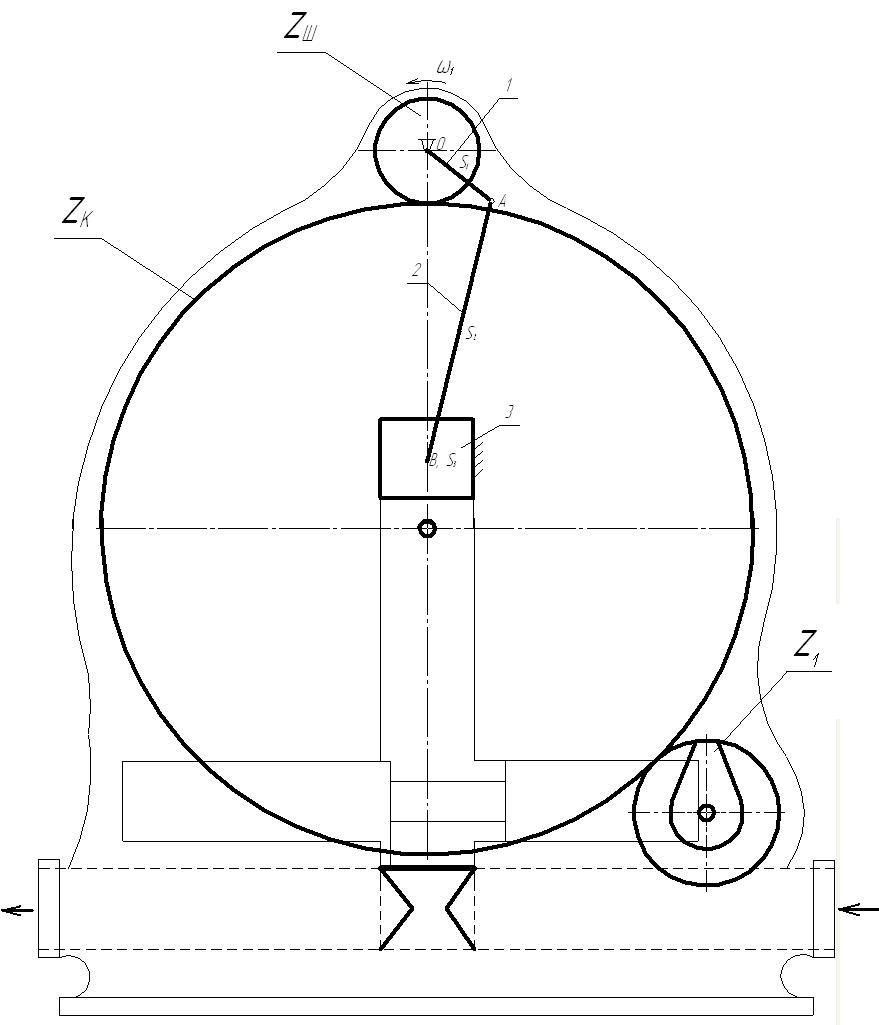
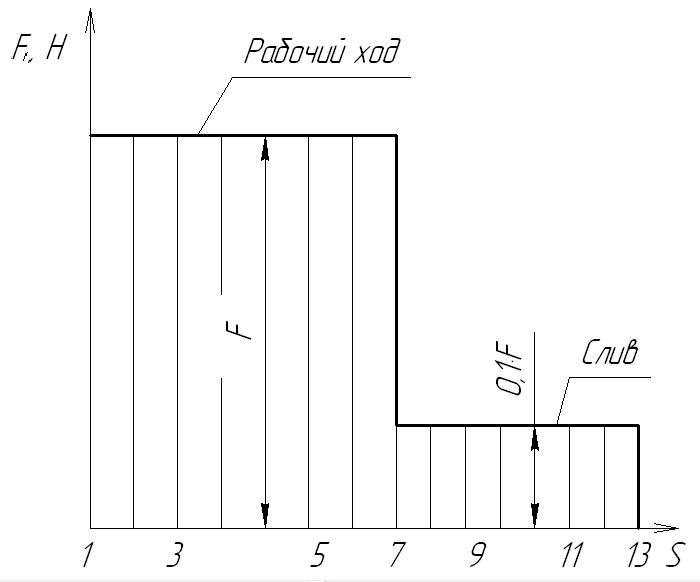
Схема механизма гидромотора и его развернутая индикаторная диаграмма.
Гидромотор состоит из кривошипно-ползунного механизма 1,2,3.Распределительный золотник выполнен в виде толкателя кулачкового механизма, состоящего из звеньев 4,5.Кулачок получает вращение от главного вала 1 через зубчатую передачу ZШ,ZК,Z1.
|
Исходные данные к заданию № 5Д | |||||||||||||
|
Параметры и идентификаторы |
Варианты | ||||||||||||
|
Кривошипно-ползунный механизм |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 | |
|
Частота вращения , с-1 |
ω1 |
80 |
90 |
100 |
110 |
120 |
110 |
100 |
80 |
90 |
100 |
110 |
120 |
|
Длина кривошипа, м |
l1*10-2 |
2 |
3 |
2,2 |
2,4 |
2,5 |
2,6 |
2,7 |
2,8 |
3 |
2,5 |
2,2 |
2,5 |
|
Длина шатуна, м |
l2*10-1 |
1 |
1,2 |
1,4 |
1,5 |
1,4 |
1,3 |
1,2 |
1,1 |
1,0 |
1,1 |
1,2 |
1,3 |
|
Коорд.ЦМ кривош.,м |
l3*10-2 |
1,0 |
1,2 |
1,1 |
1,1 |
1,2 |
1,3 |
1,3 |
1,4 |
1,5 |
1,0 |
1,0 |
1,0 |
|
Коорд.ЦМ шатуна,м |
l4*10-2 |
5 |
6 |
7 |
8 |
7 |
6 |
7 |
5 |
6 |
5 |
6 |
7 |
|
Масса кривошипа,кг |
m1*10-1 |
2 |
2,5 |
3 |
3,5 |
4 |
4 |
3,5 |
3 |
2,5 |
2 |
3 |
4 |
|
Масса шатуна,кг |
m2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,7 |
0,5 |
0,5 |
0,4 |
0,6 |
0,8 |
|
Масса поршня,кг |
m3 |
0,5 |
0,6 |
0,6 |
0,7 |
0,8 |
0,9 |
0,9 |
0,7 |
0,8 |
0,6 |
0,8 |
0,9 |
|
Момент инерции кривошипа, кгм2 |
J0*10-5 |
4,0 |
4,5 |
5 |
6 |
6,5 |
5,5 |
3 |
5,5 |
5 |
4 |
6 |
6,5 |
|
Момент инерции шатуна, кгм2 |
JS2*10-4 |
12 |
13 |
14 |
15 |
16 |
15 |
14 |
13 |
14 |
12 |
15 |
16 |
|
Неравномерность хода |
δ *10-2 |
4 |
2 |
3 |
4 |
2 |
3 |
4 |
2 |
3 |
4 |
2 |
3 |
|
Усилие нагнетания, н |
F*103 |
25 |
30 |
35 |
40 |
50 |
40 |
35 |
30 |
25 |
30 |
35 |
40 |
|
Зубчатая передача |
zШ |
12 |
13 |
14 |
15 |
14 |
13 |
12 |
13 |
14 |
15 |
12 |
13 |
|
|
zК |
18 |
19 |
20 |
21 |
22 |
20 |
22 |
20 |
18 |
19 |
20 |
21 |
|
|
m ,мм |
3,0 |
3,5 |
4,0 |
4,5 |
5,0 |
4,5 |
4,0 |
3,5 |
3,0 |
3,5 |
4,0 |
4,5 |
|
Кулачковый механизм |
h,мм |
5 |
6 |
7 |
8 |
9 |
10 |
9 |
8 |
7 |
6 |
5 |
8 |
|
|
φ0y |
60 |
80 |
100 |
120 |
120 |
100 |
80 |
60 |
80 |
100 |
120 |
100 |
|
|
φ0дc |
10 |
20 |
30 |
10 |
20 |
30 |
10 |
20 |
30 |
10 |
20 |
30 |
|
|
φc |
80 |
100 |
60 |
60 |
80 |
100 |
60 |
80 |
100 |
120 |
100 |
80 |
|
закон движения |
параб |
sin |
cos |
параб |
sin |
cos |
параб |
sin |
cos |
параб |
sin |
Cos | |