

Приложение №3 Исследовательская работа по проектированию кулачкового механизма Пример проектирование плоского кулачкового механизма с толкателем.
Программное обеспечение – Mathcad 2001 Pro

Приложение № 4
Алгоритм проектирования механики манипулятора для укладки изделий
Техническое задание
Манипулятор предназначен для укладки на стеллажи или в бункер готовых изделий (поковок). Механизм поворота хобота манипулятора состоит из гидроцилиндра 1, поршня со штоком 2, коромысла 3, шатуна 4, коромысла (хобота) 5 и стойки 8 (ряс. 1а). Движение коромыслу 3 и далее шатуну 4 и хоботу 5 передается от звена 2, которое перемещается относительно цилиндра 1 под действием силы F2. Закон изменения силы дан на рис. 16.
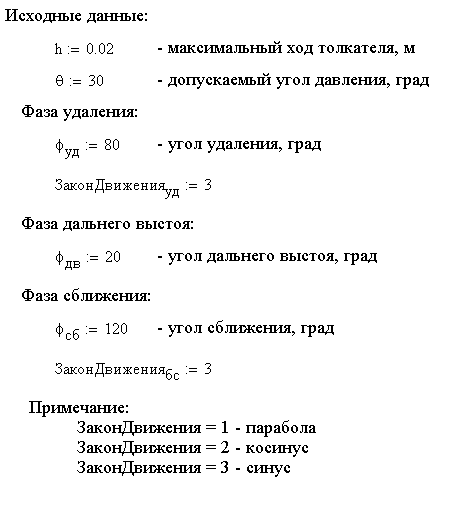
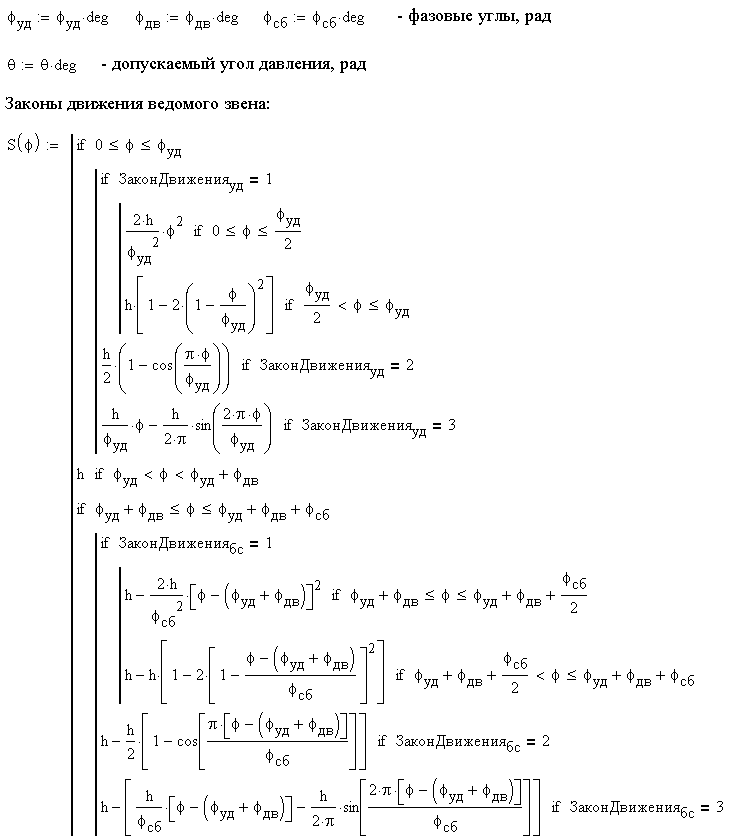
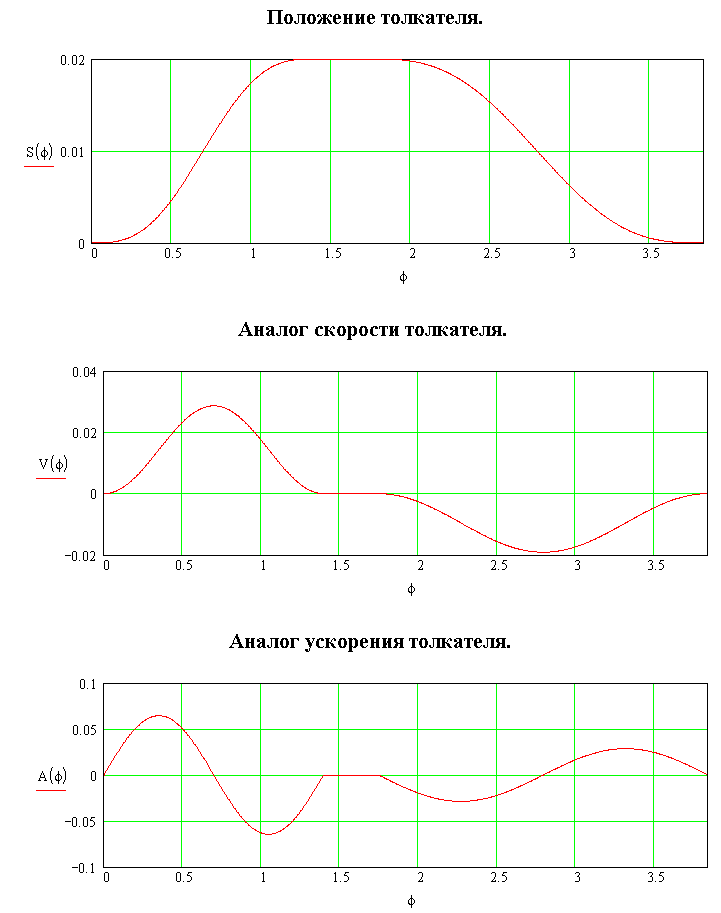
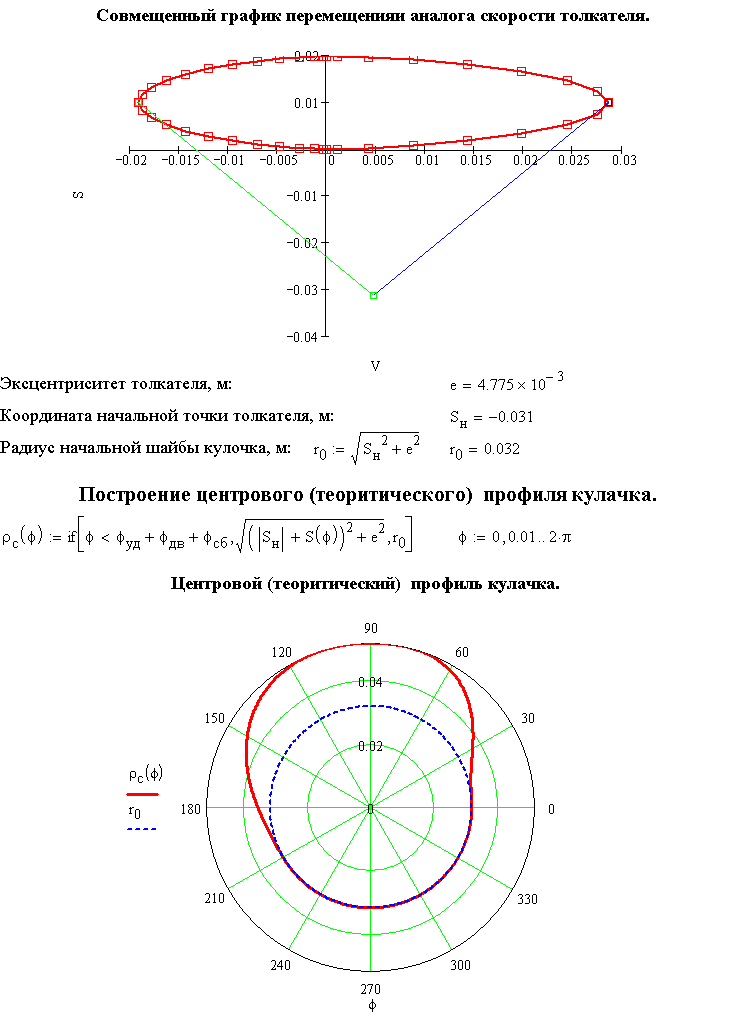
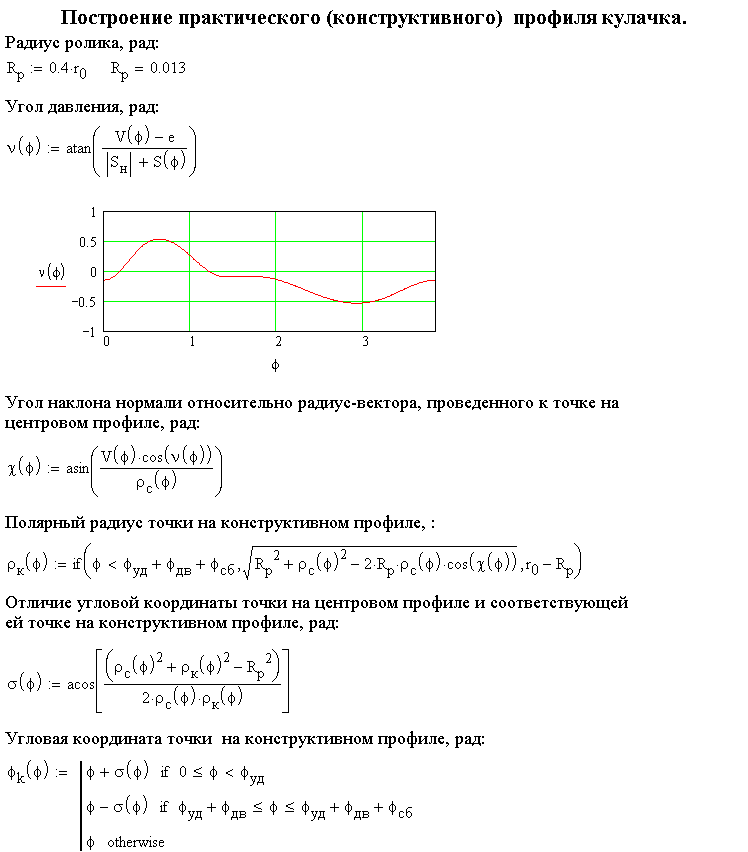
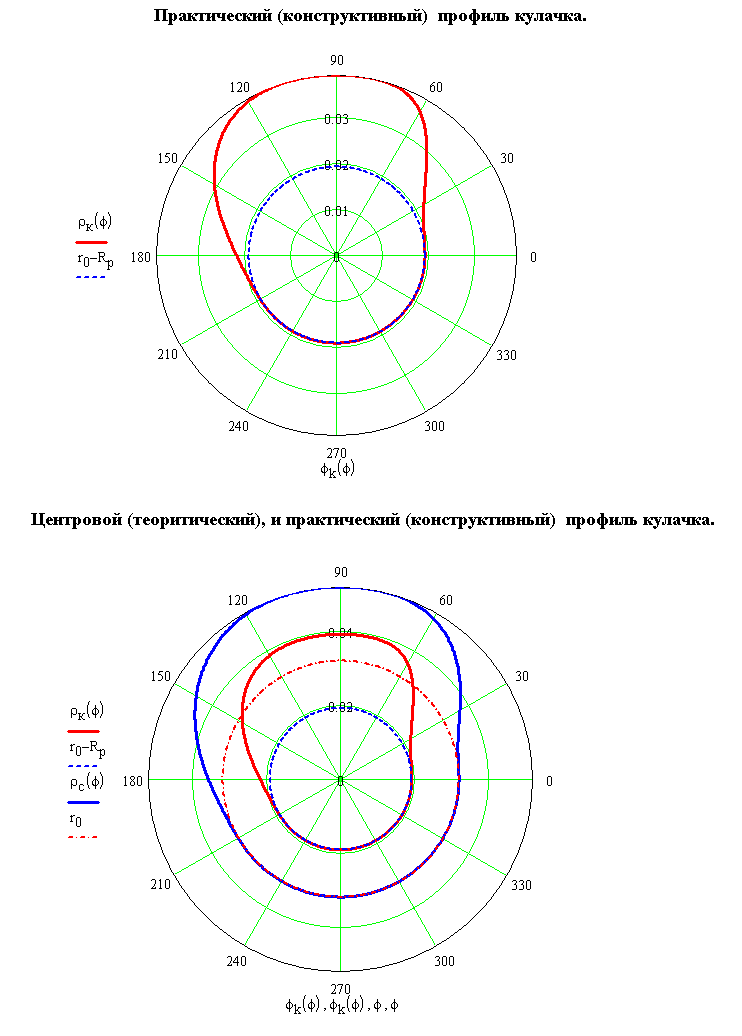
Требуемое давление в гидроцилиндре 1 устанавливается и регулируется регулятором давления, золотник которого кинематически связан с толкателем 10 кулачкового механизма (см. рис. 1а). Кулачок 9 установлен на оси С и жестко связан с коромыслом 3. Закон движения толкателя дан на рис. 1в. Удаление толкателя соответствует перемещению S21=0,9H21 звена 2 относительно цилиндра 1, при котором сила F2 изменяется от начального F2Н до конечного F2K значения (см. рис. 16). Допустимый угол давления в кулачковом механизме [v]=30°.
Вращение (поворот) схвата 6 с заготовкой 7 относительно хобота 5 осуществляется от электродвигателя 11 через двухрядный планетарный редуктор 12 со смешанным зацеплением (число блоков сателлитов k = 3) и зубчатую передачу с колесами Z1 и Z2 (см. рис. 1а). Модуль колес m=12мм.
Примечания:
При проектировании рычажного механизма обеспечивают равенство углов давления в шарнире В в его крайних положениях; принимают 1ab0=1.3Н21, 12=1.2Н21 (12 - длина звена 2); 1oe=1es7
Силу F2H рассчитывают из условия возможности начала движения (MF2пр)н=1.5(MG5пр+Mg7пр)н; силу F2K - из равенства (MF2np)к=1.5(MG5np+MG7пр)K; силу F2 - из условия безударного останова: ω3к=0 при равенстве работ АF2ц = |АG5ц + АG7ц | за время поворота (цикл).
Исходные данные
Таблица 1
|
№ п/п |
Наименование параметра |
Обозначение |
Единица СИ |
Численное значение для варианта |
|
Д | ||||
|
1 |
Высота подъема заготовки 7 |
|
м |
2.4 |
|
2 |
Расстояние от оси 0 поворота хобота 5 до центра масс S7 заготовки |
|
м |
4.5 |
|
3 |
Координата оси С коромысла 3 |
|
м |
1.4 |
|
4 |
Ход поршня 2 в цилиндре 1 |
|
м |
0.71 |
|
5 |
Максимальный угол поворота коромысла 3 |
|
град |
90 |
|
6 |
Масса коромысла 3 |
|
кг |
240 |
|
7 |
Масса хобота 5 и схвата б (с приводом) |
|
кг |
2600 |
|
8 |
Масса заготовки 7 |
|
кг |
1600 |
|
9 |
Моменты инерции звеньев 3 и 5 относительно их центров масс |
|
кг*м2 кг*м |
18 4500 |
|
10 |
Угол поворота коромысла 3 (для силового расчета механизма) |
|
град |
60 |
|
11 |
Число зубьев колес |
|
- |
15; 25 |
|
12 |
Передаточное отношение редуктора |
|
- |
26 |
|
13 |
Ход толкателя кулачкового механизма |
|
м |
0.034 |
|
14 |
Внеосность толкателя |
|
м |
0.016 |
Синтез кулисного механизма
Аналитический способ определения размеров механизма
Максимальный
угол поворота хобота 5 определяется из
треугольника
![]()
![]()
![]()
Расстояние между шарнирами А и В в крайнем положении механизма:
![]()
![]()
Длина звена 2:
![]()
![]()
Расстояние от оси О до шарнира Е:
![]()
![]()
Определение
длины ВС звена 3 из треугольника
![]()
![]()
Определение длины стойки из треугольника АВС по теореме косинусов
![]()
![]()
Координаты шарнира А определяются из треугольника АВС
![]()
![]()
![]()
Координаты шарнира С определяются из треугольника АВС
![]()
![]()
![]()