

Задание № 8 проектирование и исследование механизмов кривошипного горячештамповочного пресса
Кривошипный горячештамповочный пресс (КГШП), схема которого изображена на рис. 8а, предназначен для изготовления деталей горячей объемной штамповкой.
От вала электродвигателя 1 через клиноременную передачу, состоящую из шкива 2 и маховика 3, установленного на одном валу с шестерней 4, движение передается на зубчатое колесо 5. Кинематическое замыкание цепи 1 - 5 с основным кривошипно-ползунным механизмом, состоящим из эксцентрика 7, шатуна 8 и ползуна 9, осуществляется с помощью пневматической муфты 6.
Пресс работает в режиме единичных ходов. При выключенной муфте основной механизм пресса неподвижен, причем ползун 9 находится в крайнем верхнем положении. При включении муфты 6 (предполагается ее мгновенное включение) движение передается на эксцентрик 7, шатун 8 и ползун 9. Ползун движется вниз, деформирует поковку и поднимается в исходное положение, после чего муфта выключается, электродвигатель разгоняет маховик 3 и совершается следующий ход основного механизма. Зависимость технологического усилия от хода ползуна представлена на рис.86. Характеристика электродвигателя имеет вид, приведенный на рис.8в, аналитическая зависимость ее описывается системой
Md=2MK(S/SK+ SК/S),
S
=1-n/n0,
SK
= 1-пк/п0,
п![]() пк,
пк,
где п0 - синхронная частота вращения ротора электродвигателя, пк, Мк - критическая частота и момент ротора электродвигателя.
В
состав средств автоматизации входят
планетарный редуктор (рис. 8г) и кулачковый
механизм с дисковым кулаком и
поступательным толкателем (рис. 8д).
Закон движения толкателя определяется
второй передаточной функцией
![]()
Примечание 1: Коэффициент трения в шарнирах основного механизма f = 0.03, в поступательной паре fn =0.1.
Исходные данные
Таблица 8-1
|
№ |
Параметр |
Обозначение |
Единица измерени я |
Числовые значения для вариантов | ||||||||||||
|
|
|
|
|
А |
Б |
В |
г |
д | ||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | ||||||||
|
1 |
Наибольшее усилие деформирования |
FH |
МН |
63 |
40 |
25 |
16 |
10 | ||||||||
|
2 |
Ход ползуна |
н |
м |
0,46 |
0,4 |
0,35 |
0,3 |
0,25 | ||||||||
|
3 |
Отношение длины шатуна 8 к длине кривошипа 7 |
|
- |
7,2 |
6,7 |
6,3 |
6,3 |
6,3 | ||||||||
|
4 |
Отношение расстояния центра масс шатуна 8 до оси шарнира В к длине шатуна 8 |
|
- |
2/3 |
2/3 |
2/3 |
2/3 |
2/3 | ||||||||
|
5 |
Масса ползуна 9 |
т9 |
т |
80 |
50 |
20 |
12 |
8 | ||||||||
|
6 |
Масса шатуна 8 |
т8 |
т |
50 |
30 |
15 |
8 |
6 | ||||||||
|
7 |
Диаметр эксцентрика |
dA |
м |
1,29 |
1,09 |
0,9 |
0,755 |
0,61 | ||||||||
|
8 |
Диаметр оси шарнира О3 |
d0 |
м |
0,82 |
0,68 |
0,56 |
0,45 |
0,36 | ||||||||
|
9 |
Диаметр оси шарнира В |
dB |
м |
0,40 |
0,335 |
0,25 |
0,21 |
0,185 | ||||||||
|
10 |
Передаточное отношение всего механизма |
U1S |
- |
22,5 |
18,6 |
15,1 |
12,6 |
17,6 | ||||||||
|
11 |
Момент инерции всех вращающихся масс, приведенный к валу кривошипа |
J1 |
т.м2 |
240 |
140 |
40 |
14 |
8 | ||||||||
|
12 |
Момент инерции эксцентрика 7 и связанной с ним полумуфты 6 |
J7 |
т.м2 |
4 |
2 |
0,5 |
0,3 |
0,15 | ||||||||
|
13 |
Синхронная частота вращения ротора электродвигателя |
no |
С-1. |
16,7 |
16,7 |
16,7 |
16,7 |
25 | ||||||||
|
14 |
Критическая частота вращения ротора электродвигателя |
nk |
С-1. |
9,7 |
12,3 |
11,5 |
11,5 |
19,8 | ||||||||
|
15 |
Критический момент на валу электродвигателя |
мк |
кН.м |
7,63 |
5,24 |
3,09 |
2,17 |
0,723 | ||||||||
|
16 |
Число зубьев колес 4 и 5 |
Z4/Z5 |
- |
12/66 |
12/59 |
11/73 |
10/47 |
10/52 | ||||||||
|
17 |
Модуль зубчатых колес 4, 5 |
т |
мм |
40 |
32 |
25 |
20 |
16 | ||||||||
|
18 |
Передаточное отношение планетарного редуктора |
U1ав |
- |
22 |
19 |
15 |
13 |
17 | ||||||||
|
19 |
Число сателлитов планетарного редуктора |
К |
- |
3 |
3 |
3 |
3 |
3 | ||||||||
|
20 |
Ход толкателя 15 кулачкового механизма |
h |
м |
0,2 |
0,18 |
0,16 |
0,14 |
0,12 | ||||||||
|
21 |
Частота вращения кулачка |
n14 |
с"1 |
0,67 |
0,85 |
I |
1,5 |
1,33 | ||||||||
|
22 |
Угол рабочего профиля кулачка |
|
град |
360 |
270 |
180 |
90 |
180 | ||||||||
|
23 |
Допустимый угол давления |
|
град |
20 |
25 |
30 |
35 |
30 | ||||||||
Силовой расчет производить в положении механизма, соответствующем началу деформирования заготовки.
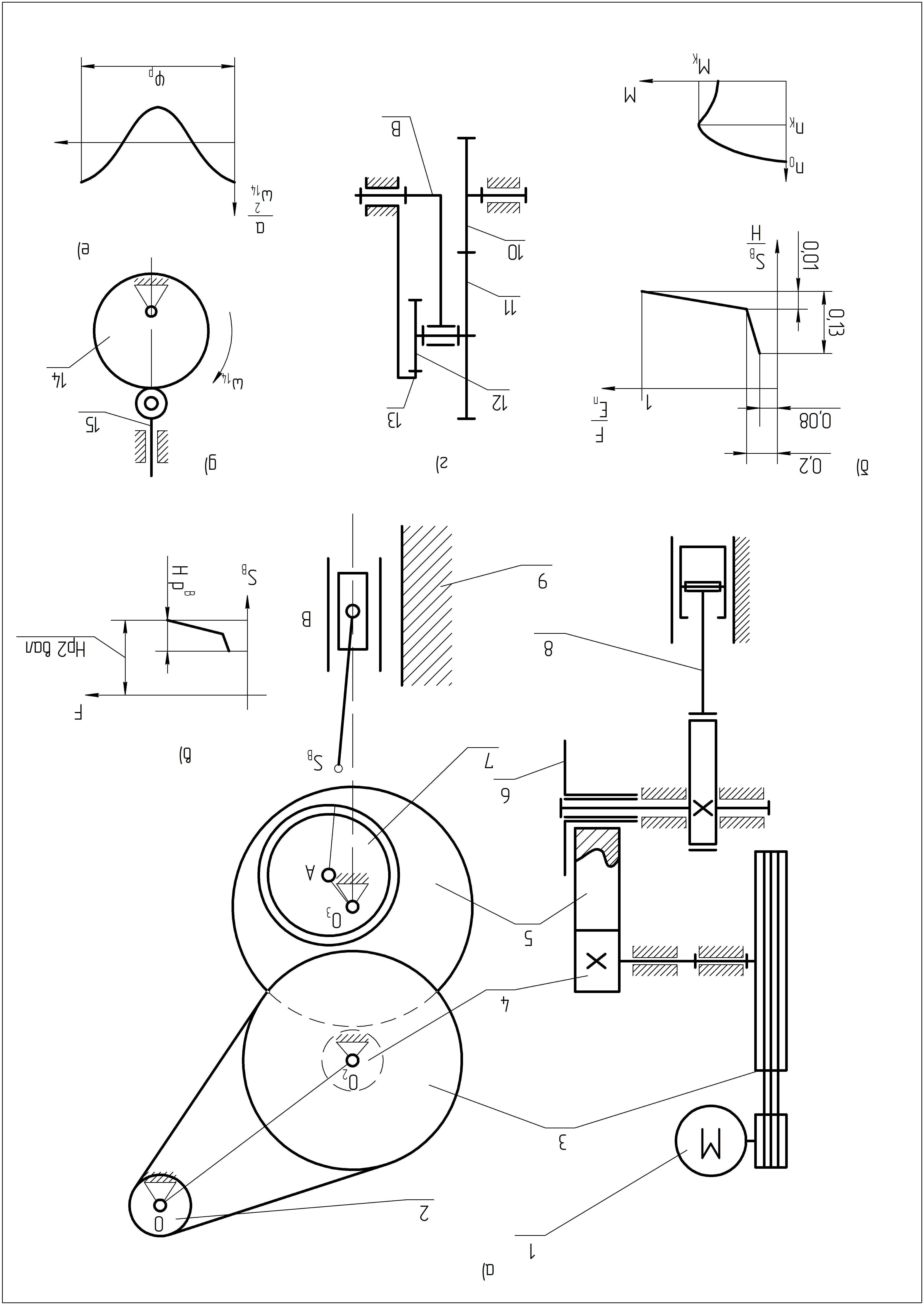
Рис. 8