2.4.2 Шатун.
Координаты точки В:
![]()
Проекции аналога скорости точки В:
![]()
Проекция аналога ускорения точки В:
![]() .
.
Проекция отрезка аг (B-s2):
![]() .
.
Координаты точки s2:
![]()
Аналог
угловой скорости шатуна: из задачи о скорости.
из задачи о скорости.
Аналог
углового ускорения шатуна: из задачи об ускорении.
из задачи об ускорении.
Проекции аналога скорости точки S2 относительно точки В:
![]()
Проекция аналога скорости точки S2:
![]()
Проекция аналога ускорения точки s2 относительно точки В:
![]()
Проекция аналога ускорения точки s2:
![]()
2.4.3 Ползун.
Координаты точки S3:
![]() .
.
Проекции аналога скорости точки S3:
![]() .
.
Проекции аналога ускорения точки S3."
![]() .
.
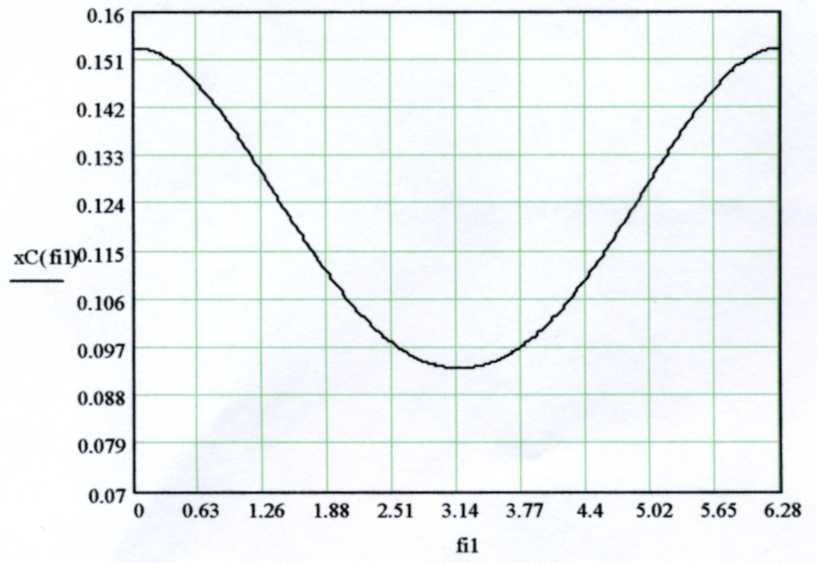
Функция положения точки С:
![]() •
•
Аналог скорости точки С:
![]() •
•
Аналог ускорения точки С:
![]() •
•
Перемещение ползуна
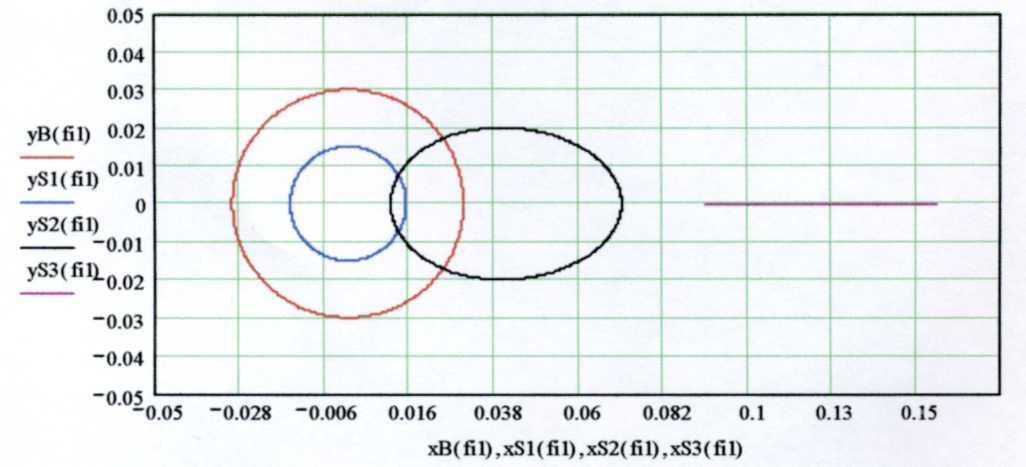
Кривошипная, шатунная и ползунная кривые
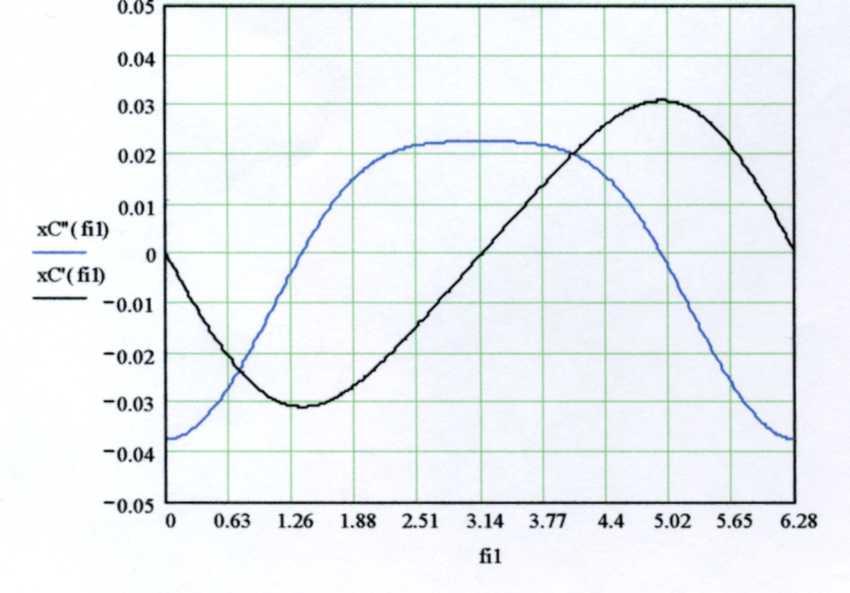
Ускорение и скорость ползуна
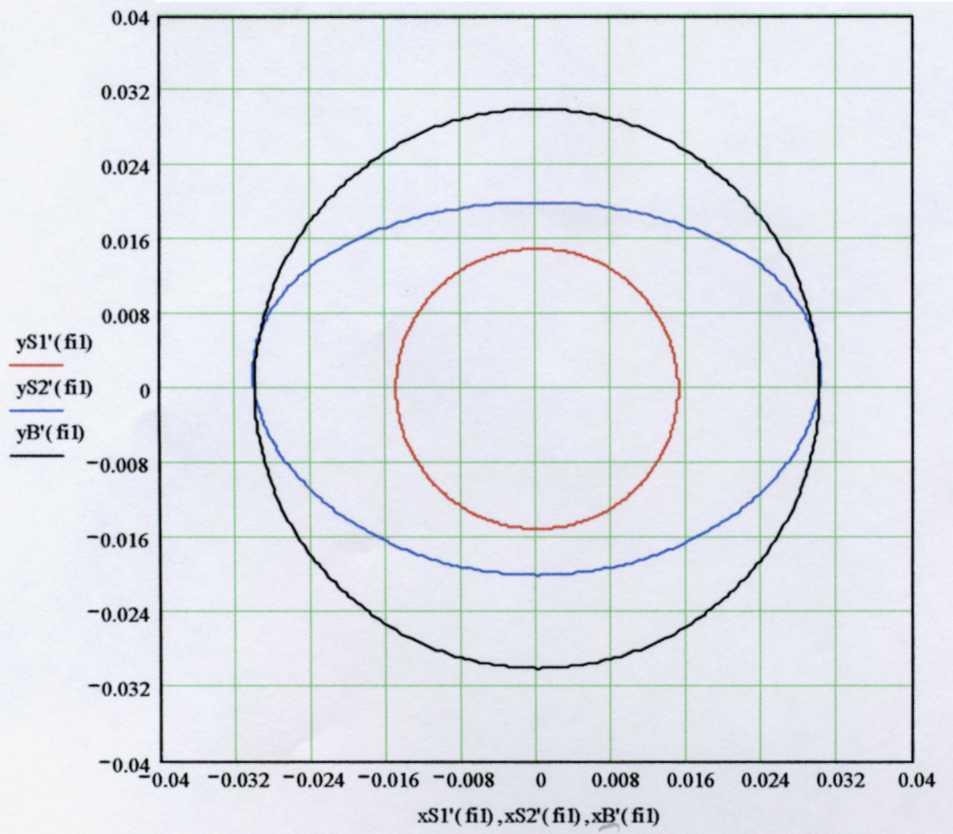
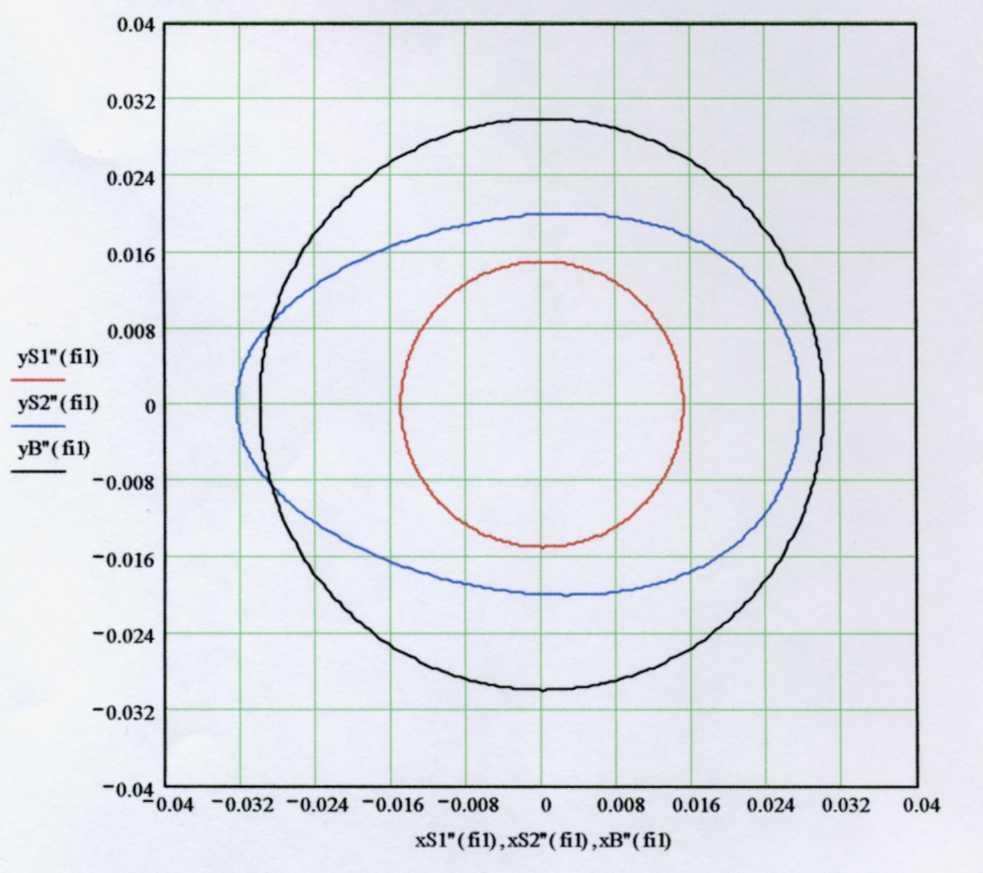
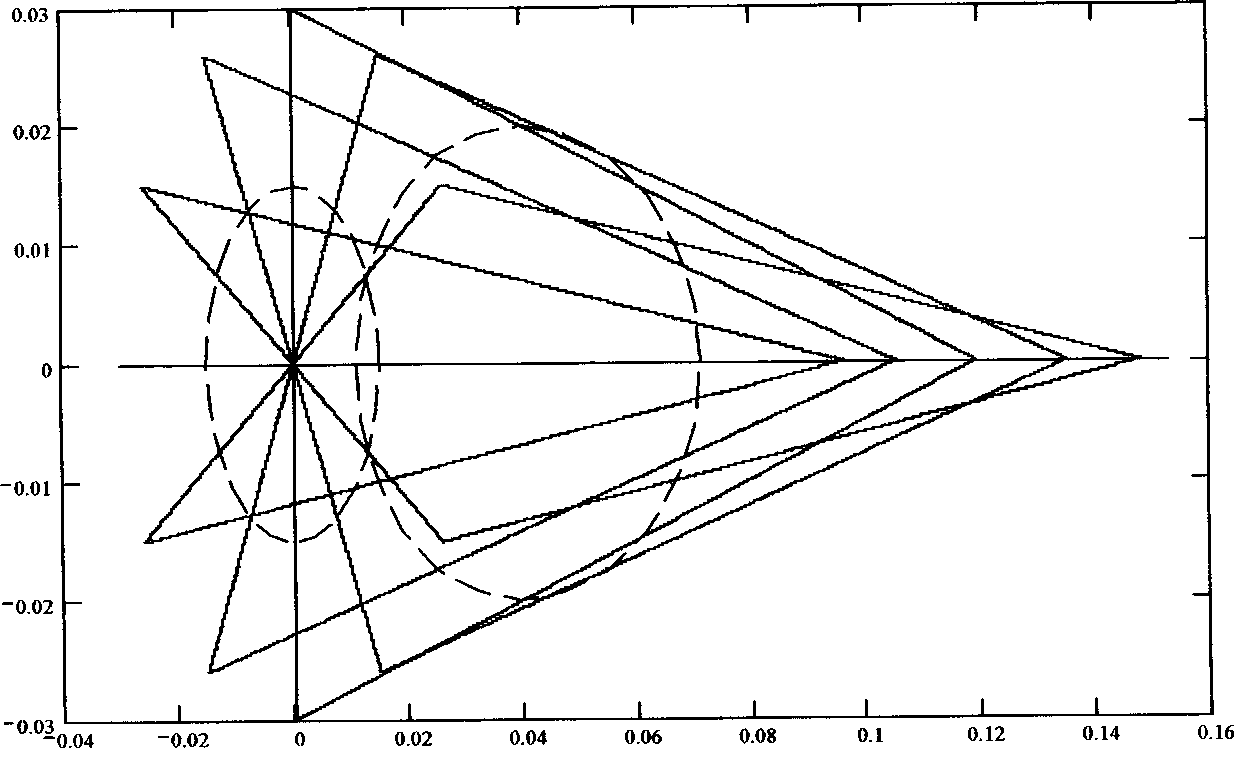
Годографы аналоговых скоростей
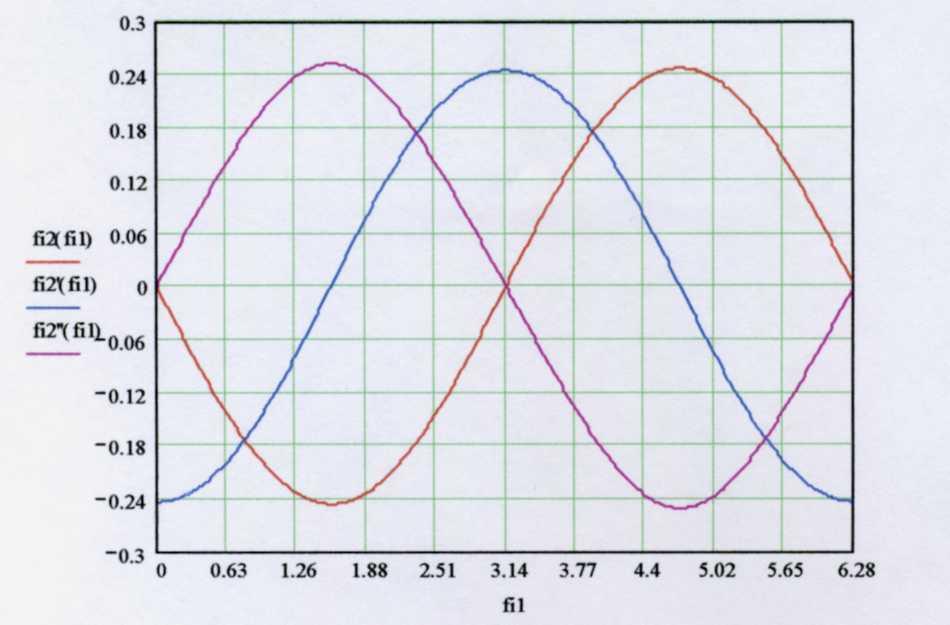
Изменение аналога скорости и аналога ускорения шатуна
Положение кривошипно-ползунного механизма

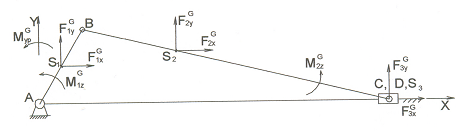
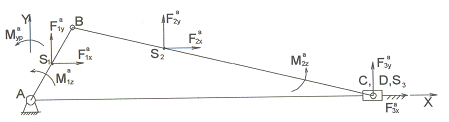
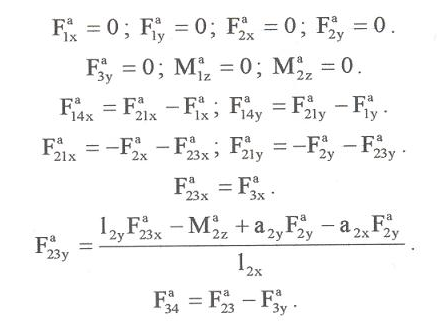
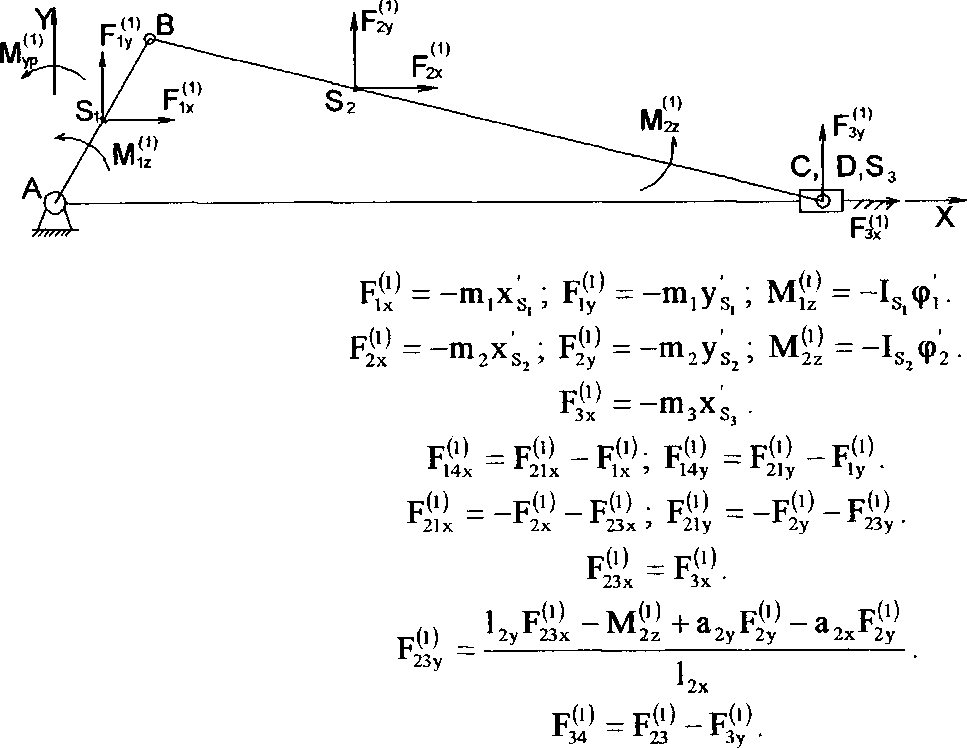
3. Силовой расчет.
Проекция отрезка A-Sr.
Проекция отрезка B-s2:

Проекция отрезка А-В:
Проекция отрезка В-С:
![]()
Основываясь на принципе возможных перемещений, запишем уравновешивающий момент:

Теперь механизм можно рассматривать как твердое тело
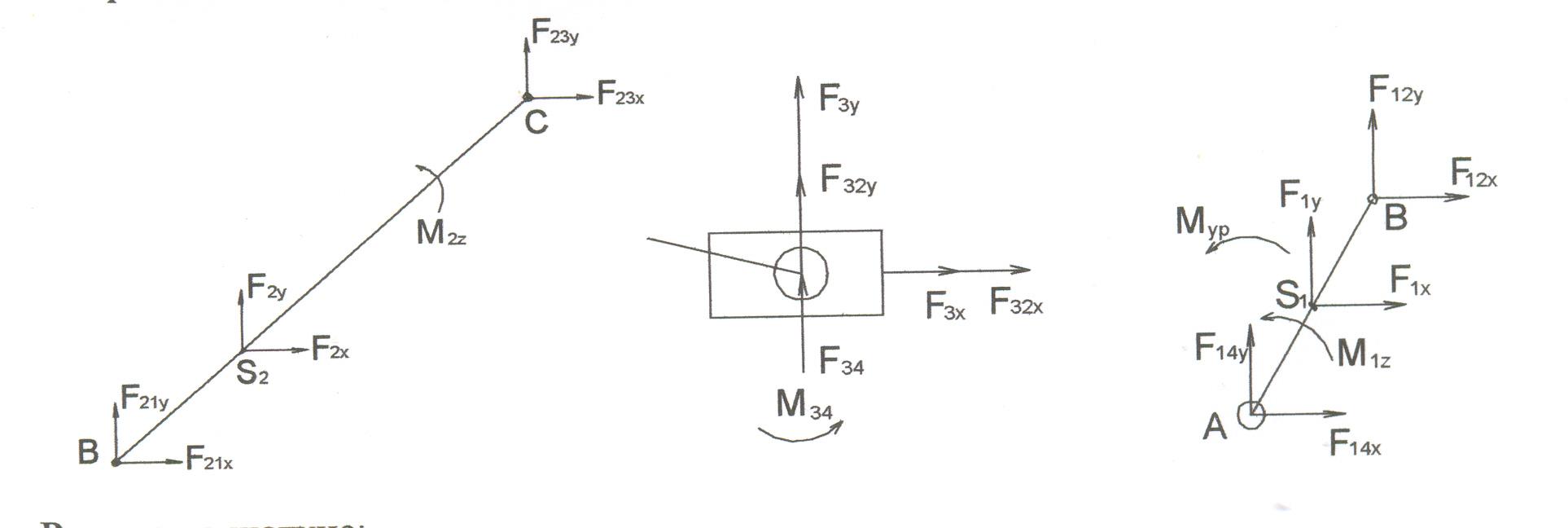
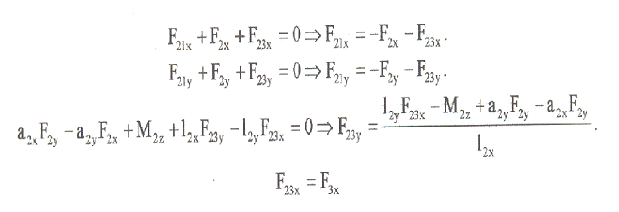
Реакции в шатуне:
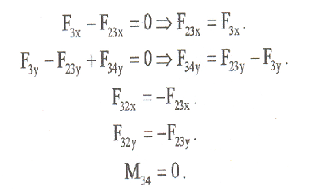
Реакции в ползуне:
Реакции в кривошипе:
3.1 Сила тяжести
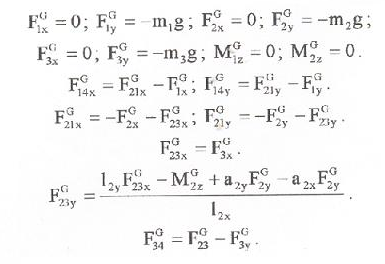
Уравновешивающий момент от силы тяжести:

3.2 Внешние активные силы.
F3ax = -8000, (Fr, действует на промежутке от нижней мертвой точки до верхней мертвой точки).
Уравновешивающий момент от внешних активных сил:

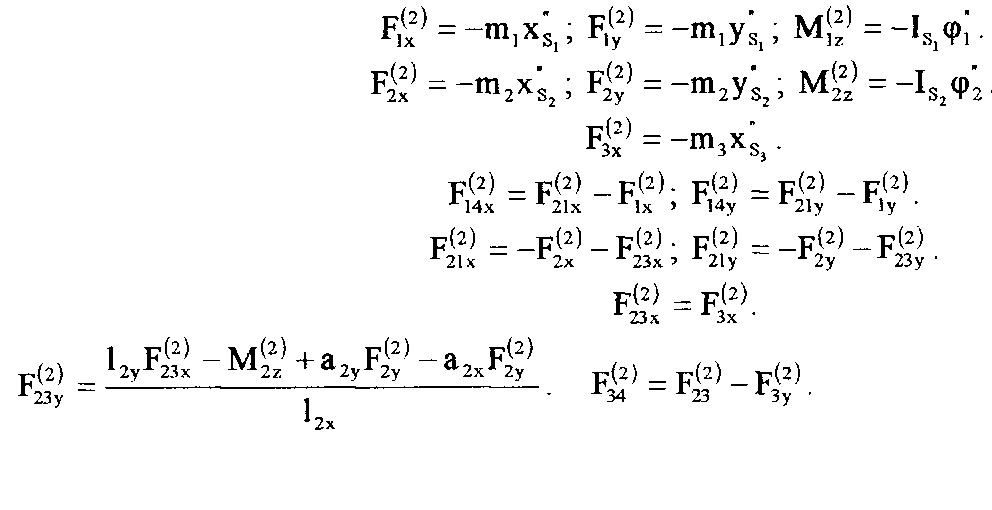
3.3 Силы инерции.
Аналоги сил инерции Iго порядка:
Аналоги сил инерции IIго порядка:
4. Расчет маховика.
При исследовании движения механизма, находящегося под действием заданных сил, удобно все силы, действующие на звенья, заменять силами, приложенными к звену приведения. Выбирают то звено, по обобщенной координате которого проводится исследование механизма, то есть кривошип.
Приведенный момент - момент, которым наделяется звено приведения и он развивает такую же кинетическую энергию, как и кинетическая энергия всего механизма.
![]()
Производная от приведенного момента инерции по φ1:
![]()
Уравновешивающие моменты от аналогов сил инерции Iго и Пго порядка.
![]()
Коэффициент неравномерности хода:

Средняя угловая скорость:
![]()
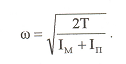
Максимальная угловая скорость:
![]()
Минимальная угловая скорость:
![]()
![]()
Момент движущих сил:
![]()
Работа движущих сил:
![]()
Момент сил сопротивления:
![]()
Работа сил сопротивления:
![]()
Приращение кинетической энергии:
![]()
Определение вспомогательных функций F, и F
![]()
Докажем, что F1, достигает F1m при ω=ωmin. Предположим, что на главном валу машины установлен маховик с требуемым моментом инерции 1м. Обозначим 1п и <о0 значения 1п и со в начале цикла:

Момент инерции маховика:
![]()
Определение значения 1п в начале цикла:
![]()
Определение начальных условий интегрирования.
![]()
Кинетическая энергия накопленная в период разгона:
![]()
Кинетическая энергия внутри цикла:
![]()
Угловая скорость кривошипа:
Угловое ускорение кривошипа: