

1.1.2 Синтез 4-х шарнирного механизма
Синтез проводится по двум положениям выходного звена .
Составляется
система уравнений из проекций векторного
контура
![]() на оси координат:
на оси координат:
![]() ;
;
![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
;
![]()
![]()
![]()
![]()
![]()
Из решения системы (1.1), находится длина ДС звена 3
![]() ;
;
![]()
и длина ED звена 4
![]() ;
;
![]()
1.2 Выбор динамической модели
Объект
динамического исследования представляет
собой механизм, состоящий из 6 звеньев.
Для того чтобы упростить определение
закона движения такого механизма,
реальный механизм заменяется динамической
моделью. Модель представляет собой
стойку и вращающееся звено 3, называемое
звеном приведения, инерционность
которого определяется суммарным
приведенным моментом
![]() На звено приведения действует суммарный
приведенный момент сил
На звено приведения действует суммарный
приведенный момент сил![]() Параметры динамической модели
Параметры динамической модели![]() определены так, чтобы законы движения
динамической модели и движения начального
звена механизма совпадали.
определены так, чтобы законы движения
динамической модели и движения начального
звена механизма совпадали.
1.3 Определение передаточных функций
Угол поворота звена 3:
![]()
Координаты
точки В находятся из проекций векторного
контура
![]()
![]() (1.2)
(1.2)
![]()
![]()
![]()
![]()
Координаты
точки D
находятся из проекций векторного контура
![]()
![]() (1.3)
(1.3)
![]()
![]()
![]()
Составляется
система из проекций векторного контура
![]() на оси координат
на оси координат
![]() ;
;
![]()
![]()
![]() (1.4)
(1.4)
![]()
Из решения системы (1.4), находится угол поворота звена 5
![]() (1.5)
(1.5)
![]()
и угол поворота звена 4
![]() (1.6)
(1.6)
![]()
Координаты
точки Е находятся из проекций вектора
![]()
![]() (1.7)
(1.7)
![]()
![]()
![]()
Координаты точки S7 находятся пропорциональным делением отрезка ОЕ
![]() (1.8)
(1.8)
![]()
![]()
![]()
Передаточная
угловая скорость определяется
дифференцированием уравнения (1.5) по
обобщенной координате
![]()
![]() (1.9)
(1.9)
Передаточное отношение:
![]() (1.10)
(1.10)
Передаточная
скорость точки Е находится дифференцированием
по обобщенной координате
![]() уравнения (1.7), которое определяет
положение точки Е.
уравнения (1.7), которое определяет
положение точки Е.
![]()
![]() (1.11)
(1.11)
![]()
Передаточная скорость точки S7 находится пропорциональным делением:
![]()
![]() (1.12)
(1.12)
![]()
Угол
поворота звена 2 находится из векторного
контура
![]()
 (1.13)
(1.13)
![]()
Расстояние
между шарнирами А и В определяется из
векторного контура
![]()
 (1.14)
(1.14)
Передаточная
скорость движения поршня относительно
цилиндра находится дифференцированием
по обобщенной координате
![]() уравнения (1.14)
уравнения (1.14)
![]() (1.15)
(1.15)
Перемещение поршня
![]() (1.16)
(1.16)
Угол поворота звена 3
f=(0 0.18 0.4 0.6 0.77 1.0 1.047 1.2 1.4 1.57) i=0…9
![]()
Графики передаточных функций
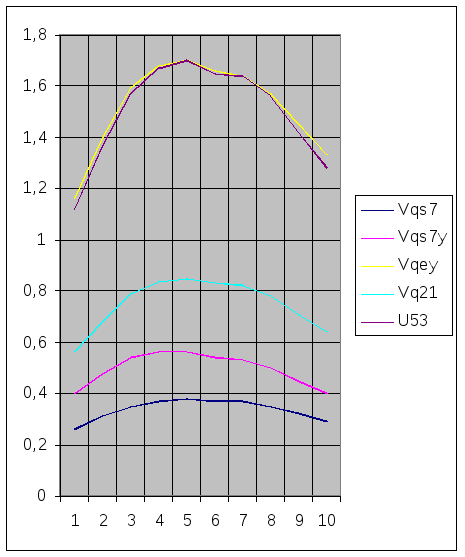
Таблица 1.1
|
|
|
|
|
|
|
|
0 |
0,26 |
0,4 |
1,16 |
0,56 |
1,12 |
|
0,18 |
0,31 |
0,48 |
1,4 |
0,68 |
1,37 |
|
0,4 |
0,35 |
0,54 |
1,59 |
0,79 |
1,57 |
|
0,6 |
0,37 |
0,56 |
1,68 |
0,84 |
1,67 |
|
0,77 |
0,38 |
0,56 |
1,7 |
0,85 |
1,7 |
|
1 |
0,37 |
0,54 |
1,66 |
0,83 |
1,65 |
|
1,05 |
0,37 |
0,53 |
1,64 |
0,82 |
1,64 |
|
1,2 |
0,35 |
0,5 |
1,57 |
0,78 |
1,56 |
|
1,4 |
0,32 |
0,45 |
1,45 |
0,71 |
1,42 |
|
1,57 |
0,29 |
0,4 |
1,33 |
0,64 |
1,28 |
1.4 Выбор закона движения механизма
Сила
![]() находится из условия начала движения.
находится из условия начала движения.
Для
получения безударной остановки
определяются такие
![]()
При
которых
![]() и
и![]()
Ускорение
свободного падения:
![]()
Сила тяжести действующая на звено 7:
![]()
![]()
Сила тяжести действующая на звено 5:
![]()
![]()
Сила тяжести действующая на звено 3:
![]()
![]()
Приведенный момент сил тяжести в начальный момент времени:
![]()
Приведенный момент движущей силы в начальный момент времени:
![]()
Сила
![]() определяется из условия начала движения
механизма
определяется из условия начала движения
механизма
![]() т.е
т.е
![]()
![]()
![]()
Приведенный момент сил тяжести в конечный момент времени:
![]()
Приведенный момент движущей силы в конечный момент времени:
![]()
Определение
![]() из условия конца движения
из условия конца движения
![]() т.е
т.е
![]()
![]()
![]()
Работа сил тяжести за время движения механизма
![]()
Работа движущей силы за время движения механизма
![]()
Определение
![]() из условия конца движения
из условия конца движения
![]() т.е
т.е
![]()
![]()
![]()
Закон изменения движущей силы определяется методом линейной интерполяции:
Значения
движущей силы в точках разрыва:

Значения
перемещения поршня в точках разрыва:
![]()
![]()
Ход
поршня:
![]()
График движущей силы
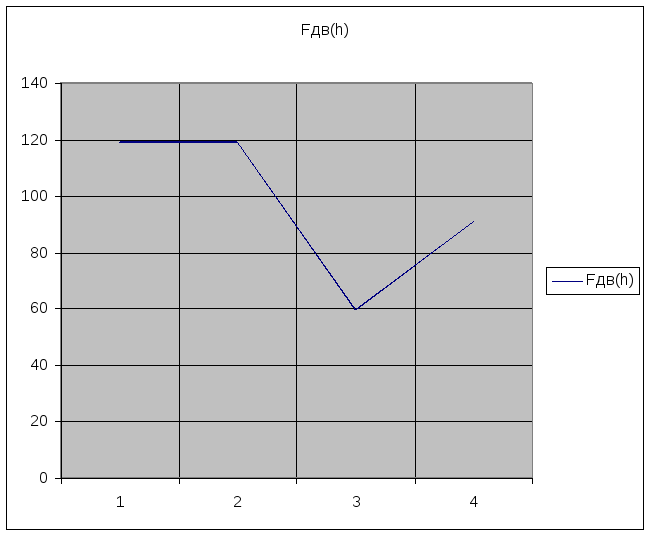
Рис. 1.2
Таблица 1.2
|
|
|
|
0 |
119,2 |
|
0,08 |
119,2 |
|
0,4 |
59,6 |
|
0,8 |
90,8 |
Зависимость
движущей силы от обобщенной координаты
![]()
![]() (1.17)
(1.17)