


Клепко В.Ю., Голець В.Л. «Вища математика в прикладах і задачах»
§ 2.6. Нерівності та їх геометричний зміст
Метод координат дозволяє геометрично тлумачити не тільки рівняння, а також і нерівності.
Подібно тому, як ми говоримо, що рівняння з двома змінними х та у F(x, y) = 0 визначає на площині деяку лінію, можна сказати, що нерівність з двома змінними х та у F(x, y) < 0 визначає множину точок площини, координати яких задовольняють цій нерівності. Та+ ким чином геометрично тлумачать і нерівність F(x, y) > 0.
Якщо вираз F(x, y) є лінійним, тобто F(x, y) = Ах + Ву + С, де А, В, С – сталі, то ми маємо лінійне рівняння
Ах + Ву + С = 0, |
(2.40) |
та дві лінійні нерівності |
|
Ах + Ву + С < 0, |
(2.41) |
Ах + Ву + С > 0. |
(2.42) |
Якщо коефіцієнти А і В не дорівнюють одночасно нулю, то рівнян+ ня (2.40) визначає на площині пряму, а нерівності (2.41) і (2.42) — відповідно дві півплощини, на які пряма (2.40) розбиває всю коор+ динатну площину. Для того щоб з’ясувати, яка із цих двох півпло+ щин визначається заданою лінійною нерівністю, можна застосувати, наприклад, такий спосіб.
Виберемо яку+небудь точку, підставляємо її координати в нерівність, що перевіряється.
Якщо координати точки задовольняють нерівність, то нерівність визначає ту площину, в якій знаходиться вибрана точка; якщо ж координати точки не задовольняють нерівність, то нерівність визна+ чає площину, яка не містить вибраної точки.
Приклад. Записати з допомогою нерівності ту півплощину, в якій лежить точка М(4; 5) та границею якої є пряма 3х – 2у + 5 = 0. Перевірити, лежить в цій же півплощині початок координат.
Розв’язок. Підставимо координати точки М в ліву частину рівнян+ ня заданої прямої: 3 4 – 2 5 + 5 = 7. Одержана величина додатна. Отже, точка М не лежить на заданій прямій, а шукана площина виз+ начається нерівністю 3х – 2у + 5 > 0.
Студенту рекомендовано зробити малюнок і розв’язати самостійно другу частину приклада.
148

Розділ II. Аналітична геометрія
Можна розглянути також систему нерівності:
F1(x, y) , 0
,F2 (x, y) 0
... ... ... ...
Fm (x, y) , 0
Областю розв’язання системи нерівностей називається множина всіх точок, координати кожної із них задовольняють всім нерівнос+ тям системи.
Перерізом кількох множин точок називається множина точок, кожна із яких належить всім множинам, що перетинаються. Очевид+ но, областю розв’язання системи нерівностей служить переріз обла+ стей розв’язання кожної із нерівностей системи.
Областю розв’язків, системи лінійних нерівностей
A x B y C |
, 0, |
|||
1 |
1 |
1 |
|
|
A2 x B2 y C2 , 0, |
||||
|
|
|
|
|
... ... ... ... ... |
||||
A x B y C |
m |
, 0, |
||
m |
|
m |
|
|
є, очевидно переріз півплощин, що визначаються кожною із нерівно+ стей системи. Ця область може бути і пустою множиною, тобто мно+ жиною, яка не містить ні одної точки (півплощини не мають спільних точок).
Якщо ж ця множина точок не пуста, то вона називається много+ кутною областю. Якщо, крім того, ця область обмежена, тобто на містить точок з як завгодно великим значенням координат, то її на+ зивають многокутником.
Приклад. Записати з допомогою системи нерівностей множину точок, що лежать всередині трикутника з вершинами А(2; 1), В(6; 3), С(4; 5).
Розв’язок. Студенту рекомендовано зробити Рис.. Очевидно, мно+ жину всіх внутрішніх точок трикутника АВС можна розглянути як перетин трьох півплощин, з яких перша обмежена прямою АВ і містить
149

Клепко В.Ю., Голець В.Л. «Вища математика в прикладах і задачах»
точку С, друга обмежена прямою ВС і містить точку А, третя обме+ жена прямою АС і містить точку В.
Знайдемо нерівність, що визначає першу із цих півплощин. Скла+ демо рівняння прямої АВ, знаючи координати точок А і В:
x 2 |
|
y 1 |
або х – 2у = 0. |
6 2 |
|
||
|
3 1 |
||
Підставляючи в ліву частину цього рівняння координати точки С, одержуємо 4 – 25 = –6 < 0. Отже, перша півплощина визначаєть+ ся нерівністю
х – 2у < 0.
Аналогічно, площина, що обмежена прямою ВС і містить точку А, визначається нерівністю:
х+ у – 9 < 0.
Аплощина, що обмежена прямою АС і містить точку В — не+ рівністю:
2х – у – 3 < 0.
Отже множина всіх внутрішніх точок трикутника АВС визна+ чається системою нерівностей
x 2y , |
0, |
|
, 0, |
x y 9 |
2x y 3 , 0.
Якщо замість строгих нерівностей (< або >) розглядати не строгі
нерівності ( або & ), то в визначеній ними області включаються і границі цих півплощин.
Наприклад область розв’язків нерівностей:
x 2y |
0, |
|
0, |
x y 9 |
|
|
|
2x y 3 0. |
|
є область, що обмежена трикутником АВС, включаючи як її внутрішні, так і граничні точки, тобто і точки відрізків АВ, ВС, АС.
150
Розділ II. Аналітична геометрія
Аналогічно інтерпретуються геометрично лінійні нерівності з трьома змінними. Лінійна нерівність з трьома невідомими визначає півпростір, а система таких нерівностей – переріз півпростору. Якщо він не порожній, є многогранною областю або, в випадку обмеже+ ності, многогранником.
2.6.1. Приклади розв’язання задач.
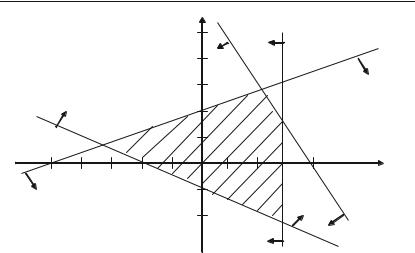
Задача 2.121. Побудувати область розв’язків системи лінійних нерівностей:
2x1 5x2 & 10;
x
1 3;
3x1 3x2 12;
x1 2x2 & 12.
Розв’язок. Будуємо граничні прямі, що відповідають даним не+ рівностям, за двома точками, що відповідають цим прямим:
(l1): |
2х1 |
– 5х2 = –10, |
A1(0; 2) l1, |
A2(–5; 0) l1; |
|||
(l2): |
x1 |
= 3; |
|
6) l3, |
|
l3; |
|
(l3): |
3х1 |
+ 3х2 = 12, |
B1(0; |
B2(4; 0) |
|||
(l4): |
х1 |
+ 2х2 = –12, |
C1(0; |
–1) l4, |
C2(–2; |
0) l4. |
|
Кожна пряма ділить площину на дві півплощини. Та з них, що містить початок координат, і є областю розв’язків кожної з нерівно+ стей (координати точки О(0; 0) задовольняють кожній нерівності). Стрілками позначимо півплощини, які є областями розв’язків даних нерівностей. Перетин відмічених півплощин — чотирикутник АВСD — є область розв’язків даної системи (рис. 2.21).
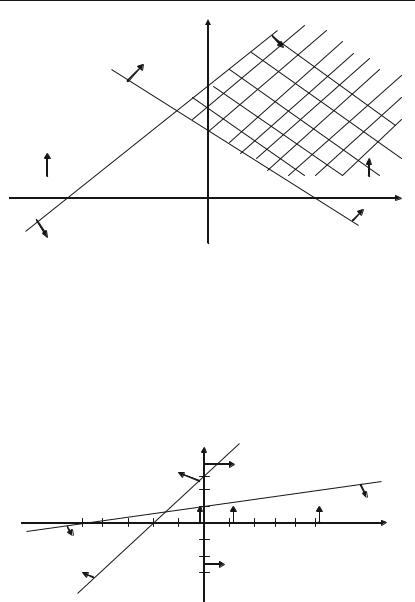
Задача 2.122. Побудувати область розв’язків системи лінійних нерівностей:
x1 x1 6; |
|
|
& 15; |
3x1 5x2 |
|
|
|
x2 & 1. |
|
151
Клепко В.Ю., Голець В.Л. «Вища математика в прикладах і задачах»
|
|
Х2 |
|
|
|
|
5 |
(l2) |
|
|
|
|
(l1) |
|
|
|
|
|
|
|
|
|
B |
|
|
|
2 |
C |
|
|
|
|
|
|
|
A |
|
|
|
–5 |
–2 |
О |
3 4 |
Х1 |
|
|
–1 |
|
|
|
|
|
|
(l3) |
|
|
|
D |
|
|
|
|
(l4) |
|
|
|
Рис. 2.21. |
|
|
Розв’язок. Будуємо граничні прямі, що відповідають даним не+ рівностям:
(l1): –х1 + х1 = 6, A1(0; 6) l1, A2(–6; 0) l1;
(l2): 3х1 + 5х2 = 15, B1(0; 3) l2, B2(5; 0) l2; (l3): x2 = 1.
Область розв’язків першої прямої містить початок координат, а область розв’язків другої і третьої нерівностей — не містять початку координат (координати точки О(0; 0) не задовольняють другій і третій нерівностям). Стрілками позначимо півплощини, точки яких задо+ вольняють нерівностям. Областю розв’язків є опукла необмежена область (рис. 2.22).
Задача 2.123. Побудувати область розв’язків системи лінійних нерівностей:
3x1 2x2 6; |
|
|
|
x1 5x2 5; |
|
|
& 0; |
x1 |
|
|
& 0. |
x2 |
|
152
Розділ II. Аналітична геометрія
Х2 
|
|
|
|
|
|
|
|
|
|
|
|
|
(l1) |
|
|
|
|
|||
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(l3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Х1 |
||
|
|
–6 |
|
|
|
|
|
О |
|
|
|
|
5 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(l2) |
|
|
|
|
|
|
|
|
|
Рис. 2.22. |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Розв’язок. Будуємо граничні прямі: |
|
|
|
|
||||||||||||||||
(l1): |
3х1 – 2х2 |
= 6, A1(0; 6) l1, A2(–6; 0) l1; |
|
|
|
|
||||||||||||||
(l2): |
–х1 + 5х2 |
5, B1(0; 1) l2, B2(–5; 0) l2; |
|
|
||||||||||||||||
(l3): |
х1 = 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(l4): |
х2 = 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Будуємо область розв’язків кожної нерівності (рис. 2.23).
Не існує жодної точки, загальної для всіх площин, що відповіда+ ють даним рівнянням. Отже, область розв’язків порожня. Система нерівностей несумісна.
|
|
|
Х2 |
|
|
|
3 |
–5 |
–2 |
О |
Х1 |
Рис. 2.23.
153

Клепко В.Ю., Голець В.Л. «Вища математика в прикладах і задачах»
2.6.2. Задачі для самостійного розв’язку
2.124. Побудувати області, координати яких задовольняють не+ рівностям:
а) у < 2 – x, x > –2, y > –2. б) y > 2 – x, x < 4, y < 0.
в) 4x 2y 1, y & x + 2, x & –4.
2.125. Побудувати область розв’язків системи лінійних нерівно+
стей:
|
x x |
|
7, |
||
|
1 |
|
2 |
|
|
|
2x1 3x2 4, |
||||
а) |
& 1, |
|
|
||
|
x1 |
|
|
||
|
|
& 0; |
|
|
|
|
x2 |
|
|
||
|
2x1 3x2 13, |
||||
г) |
|
x2 & 6, |
|||
x1 |
|||||
|
4x x |
2 |
16; |
||
|
|
1 |
|
|
|
x 2x |
|
& 4, |
x1 4x2 4, |
||||||||
|
1 |
|
|
2 |
|
||||||
2x1 x2 & 4, |
|
|
|
& 0, |
|
||||||
б) |
x |
& 0, |
|
|
в) x1 |
|
|||||
|
|
|
|
|
|
|
|
|
|||
1 |
|
|
|
|
|
|
& 0; |
|
|||
|
|
& 0; |
|
|
x2 |
|
|||||
x2 |
|
|
|
|
|
|
|
|
|||
x1 2x2 & 6, |
x1 2x2 10, |
||||||||||
3x |
1 |
x |
2 |
& 8, |
x |
1 |
2x |
2 |
& 2, |
||
|
|
|
|
|
|
|
|
||||
|
|
x2 3, |
|
|
|
x2 10, |
|||||
д) x1 |
е) 2x1 |
||||||||||
x |
& 0, |
|
|
x |
|
& 0, |
|
|
|||
|
1 |
|
|
|
|
|
1 |
|
|
|
|
x2 & 0; |
|
|
x2 & 0. |
|
|
||||||
154