

Оптимальное совмещение
Создание СК при помощи best-fit (оптимального совмещения) подразумевает такое создание СК, чтобы среднеквадратичные отклонения измеренных значений от номинальных были минимальны. Для этого используется итерационное преобразование СК путем поворота и переноса. Таким образов данная система координат дает оптимальное совмещение детали и математической модели детали.
Для создания такой системы координат вы должны измерить ряд точек или геометрических элементов на детали, по которым вы хотите получить оптимальное совмещение.
Возможно задать ограничения по повороту и переносу при проведении итераций совмещения. Вы так же можете задать блокирование поворота (или переноса) одной или несколько осей при осуществлении совмещения.
Возможно использовать два разных алгоритма совмещения, в зависимости от используемых элементов для совмещения (точки или характерные точки целостных геометрических элементов, например угол плоскости).
Совмещение по точкам геометрического элемента
Когда элементы детали, используемые для совмещения не только точки, СК рассчитывается следующим образом:
Минимизируется отклонение между измеренными и номинальными точками
Минимизируется угол между измеренными и номинальными элементами, например плоскостями.
Совмещение по точкам
Когда для совмещения используется только точки, СК рассчитывается исходя из минимального отклонение между точками.
Используется два разных метода расчета, в зависимости от того, используете ли вы все три координаты точки, или две координаты точки и нормаль, задающую плоскость в этой точке.
Когда вы имеете только номинальные координаты точек N, Arco вращает и транслирует СК до тех пор, пока расстояние между координатами измеренной точки M и номинальными координатами M’i-Ni будет минимальным. При этом методе, координаты точек детали должны быть измерены очень аккуратно, так как в противном случае совмещение может дать плохой результат.
Если же вы имеете точки и нормали, согласно второму методу, вы имеете только две координаты номинальной точки N и нормаль, задающую плоскость в этой точке, при этом ошибка измерения будет минимальна. На рисунке ниже показано, N номинальная точка, M’ измеренная и совмещенная точка, M’’ tпроекция точки M’ на плоскость точки N.
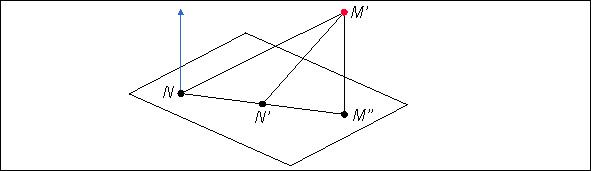
В этом случае процедура оптимального совмещения заключается в минимизировании M’-N’, где N’ точка сегмента NM’’ (включая конечные точки). Позиция N’ на сегменте может задаваться (как относительный отступ) где 0 подразумевает N’ совпадающая с N, и где значение 100 соответствует концу отрезка, т.е. при значении 100 N’ совпадет с M’’.
Затем, задавая значение относительного отступа равное 0 вы минимизируете M’-N, и получаем предыдущий случай (где мы имеем все три координаты). Взамен, устанавливая 100 вы минимизируете расстояние M’-M’’ , уменьшая измерительную ошибку при измерении точек.
Используя последний метод (при значении относительного отступа равного 100) в некоторых редких случаях мы можем внести неопределенность в метод оптимального совмещения. Для случая, когда все точки N или M ложные, алгоритм минимизации расстояния M’-M’’ не сможет установит оптимальное расположение СК на плоскости. Для избежание таких случаев, достаточно задать отступ чуть менее 100 (95-99) для оптимизирования расстояния M’-M’’ , аналогичные ситуации и их решение применимо для расстояния M’-N.