

матан
.pdf№ 35.6.
V =∫∫∫1 dxdydz =→
V
Перейдем от старых координат (x, y, z) к промежуточным (u,v, z) , полагая что:
x =au |
dxdydz = |
|
D(x, y, z) |
|
dudvdz = |
|
xu′ |
xv′ xz′ |
|
dudvdz = |
|
a 0 0 |
|
dudvdz =ab dudvdz |
|
|
|
|
|
|
|
||||||||||
|
|
||||||||||||||
y =bv |
|
|
|
y′ |
y′ |
y′ |
|
|
0 b 0 |
|
|||||
z = z |
|
|
D(u, v, z) |
|
|
|
u |
v |
z |
|
|
|
|
|
|
|
|
|
|
|
zu′ |
zv′ zz′ |
|
|
|
0 0 1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
V ={ax22
→=∫∫∫ D(x, y, z) D(u, v, z)
∆
+ |
y2 |
≤1, |
x2 |
+ |
y2 |
≤ z ≤1} → ∆={u2 +v2 ≤1, u2 +v2 ≤ z ≤1}. |
|
b2 |
a2 |
b2 |
|||||
|
|
|
|
dudvdz =∫∫∫ab dudvdz =→
∆
Переходя далее от промежуточных координат (u,v, z) к цилиндрическим (r,ϕ, z)
u =r cosϕ
v =r sinϕ dudvdz =r drdϕdz
z = z
∆={u2 +v2 ≤1, u2 +v2 ≤ z ≤1} → Ω={0 ≤ϕ ≤2π, 0 ≤r ≤1, r ≤ z ≤1},
находим:
|
2π |
1 |
1 |
1 |
|
|
|
→=ab∫∫∫rdrdϕdz=ab ∫( |
∫( |
∫rdz )dr |
)dϕ=2πab∫r (1−r )dr =2πab(12 r2 −13 r3 ) |
|
1 |
=13πab. |
|
|
|||||||
|
0 |
||||||
Ω |
0 |
0 |
r |
0 |
|
|
|
Получена известная формула объема конуса V = 13πab , в основании которого лежит эллипс с площадью SOCH =πab и высотой h =1.
Замечание. Координаты (r,ϕ, z) для исходных декартовых координат (x, y, z) получили название обобщенных цилиндрических координат:
x =ar cosϕ |
|
|
D(x, y, z) |
|
=ab r |
|
|
||||
y =br sinϕ |
|
|
|||
z = z |
|
|
D(r,ϕ, z) |
|
|
|
|
|
|
|
|
36. Тройные интегралы. Переход к сферическим координатам
Условия.
№ 36.1. Найти массу тела, ограниченного заданными поверхностями, с объемной плотностью ρ = ρ(x, y, z) .
x2 + y2 + z2 =a2 , ρ = x2 + y2 + z2 . |
x2 + y2 + z2 =a2 , ρ = |
|
1 |
. |
|
x2 |
+ y2 + z2 |
||||
|
|
|
№ 36.2. Найти заряд тела, ограниченного заданными поверхностями, с объемной плотностью ρ = ρ(x, y, z) .
x |
2 |
+ y |
2 |
+ z |
2 |
=2az, |
ρ = |
1 |
|
x2 + y2 + z2 =az, ρ = x2 + y2 + z2 . |
|
x2 + y2 + z2 . |
|||||||||||
|
|
|
|
||||||||
№ 36.3. Найти центр масс тела, ограниченного заданными поверхностями, с объемной плотностью ρ = ρ(x, y, z) .
x2 + y2 + z2 =az, z ≥ x2 + y2 ; |
x2 + y2 + z2 =a2 , z ≤ x2 + y2 ; |
||||
ρ = |
|
1 |
. |
ρ = x2 + y2 + z2 . |
|
x2 |
+ y2 + z2 |
||||
|
|
|
|||
Найти объем тела, ограниченного поверхностями.
№ 36.4. |
x2 + y2 + z2 =a2 , |
z ≥ |
x2 + y2 |
; |
№ 36.4. |
x2 + y2 + z2 =az, |
z ≥ |
3(x2 + y2 ); |
|||||||||||||||||||
3 |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
z |
|
|
|
|
|
|
|
|
|||||
№ 36.5. |
x2 |
+ |
y2 |
+ |
z2 |
=1. |
|
|
|
№ 36.5. |
2 |
+ |
y |
+ |
2 |
=1, |
z |
≥ |
|
x |
2 |
+ |
y |
. |
|||
|
|
|
a |
2 |
2 |
c |
2 |
c |
a |
2 |
2 |
||||||||||||||||
a2 |
b2 |
c2 |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
b |
|||||||||
Теория.
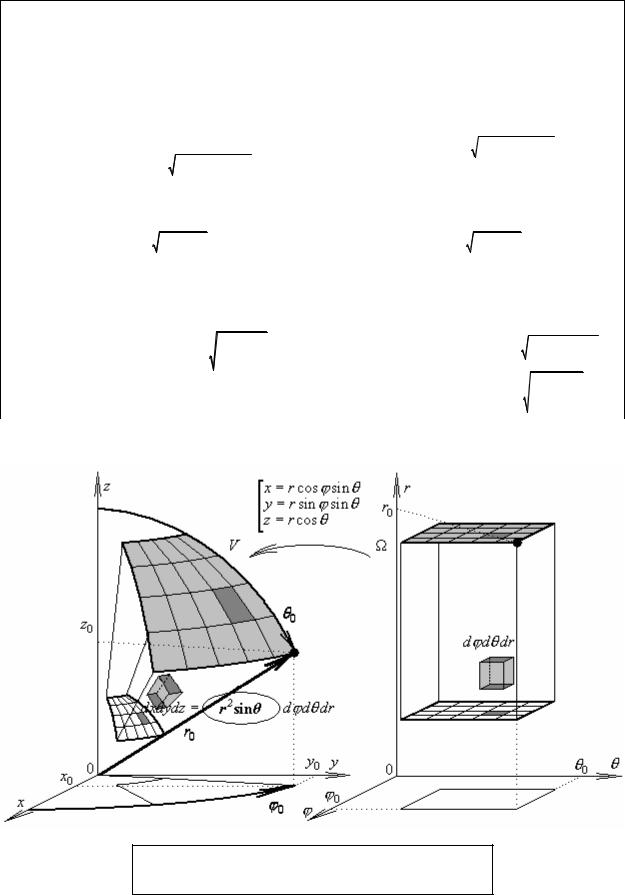
∫∫∫f (x2 + y2 + z2 )dxdydz =∫∫∫f (r2 ) r 2sinи dϕdθdr
V Ω
Решения.
№ 36.1.
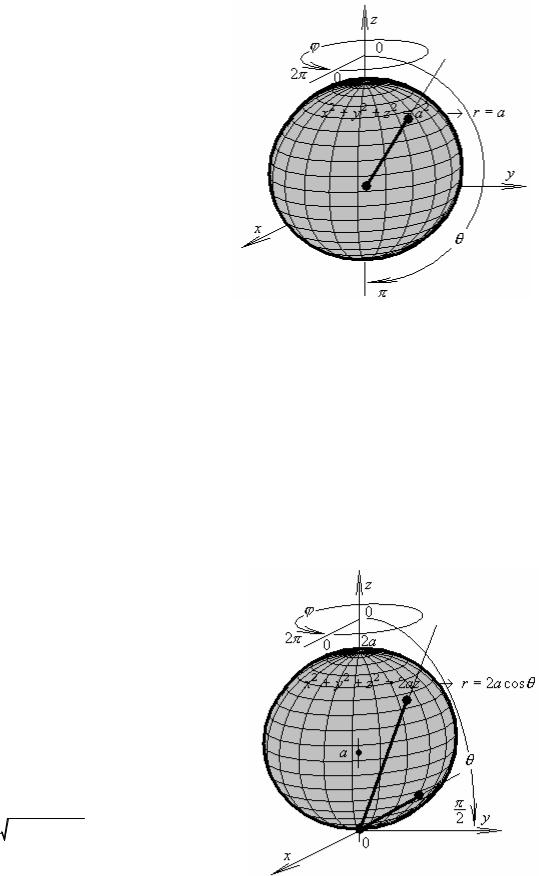
Сфера
S ={x2 + y2 + z2 =a2 }
ограничивает шар
V ={x2 + y2 + z2 ≤a2 }
радиуса a с центром в начале координат (0,0,0) :
m =∫∫∫ρ (x, y, z)dxdydz =
V
=∫∫∫(x2 + y2 + z2 ) dxdydz =→
V
Учитывая вид подынтегральной функции f (x2 + y2 + z2 ) и “сферическую” форму объема
V , перейдем к сферическим координатам. Поскольку
то |
|
|
|
|
|
|
|
|
|
|
x2 + y2 + z2 =a2 |
→ r2 =a2 r =a , |
|
|
|
||||||||
|
|
|
V ={x2 + y2 + z2 ≤a2 } → Ω={0 ≤ϕ ≤2π, 0 ≤θ ≤π, 0 ≤r ≤a}. |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
Имеем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
a |
|
|
|
→=∫∫∫r |
2 |
|
2 |
|
|
|
|
|
|
|
2π |
|
π |
4 |
sinθ dr )dθ |
|
2π |
π |
4 |
|
|||
|
r |
|
sinθ dϕdθdr = ∫ |
|
∫( |
∫r |
|
dϕ = ∫ |
1 dϕ ∫sinθdθ ∫r |
|
dr = |
||||||||||||
Ω |
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
0 |
|
|
|
0 |
0 |
0 |
|
|
|
=2π (−cosθ) |
|
π |
1 r5 |
|
a |
= 4 πa5 . |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
№ 36.2. |
|
|
|
|
|
0 |
5 |
|
0 |
5 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
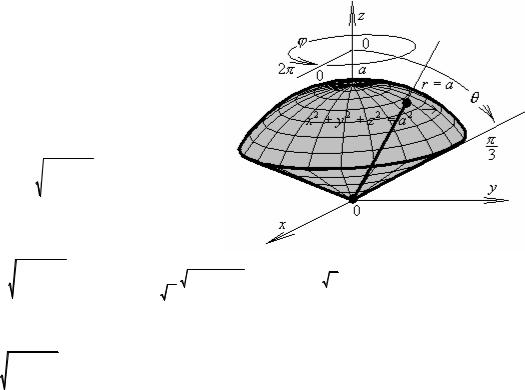
“Смещенная” сфера |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
S ={x2 + y2 + z2 =2az} |
|
|
|
|
|
|
|
|
|
|
|||||||||||
ограничивает шар |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
V ={x2 + y2 +(z −a)2 ≤a2 } |
|
|
|
|
|
|
|
|
|
|||||||||||||
радиуса a с центром в точке (0,0, a) : |
|
|
|
|
|
|
|
|
|||||||||||||||
q =∫∫∫ρ (x, y, z)dxdydz = |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=∫∫∫ |
|
|
1 |
|
dxdydz =→ |
|
|
|
|
|
|
|
|
|
|
||||||||
x2 |
+ |
y2 + z2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Учитывая вид подынтегральной функции f (x2 + y2 + z2 ) и “сферическую” форму объема V , перейдем к сферическим координатам.

Поскольку
то |
|
|
|
|
|
|
|
x2 + y2 +z2 =2az |
→ r2 =2ar cosθ |
r =2a cosθ , |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
||
|
|
V ={x2 + y2 +(z −a)2 ≤a2 } → Ω={0 ≤ϕ ≤2π, 0 ≤θ ≤ |
, 0 ≤r ≤ |
|||||||||||||||
Имеем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
π |
||
|
|
|
|
|
|
|
|
|
|
|
|
2∫π ( |
2a ∫cosθ rsinθdr |
|
)dϕ= |
2∫π |
||
→=∫∫∫ |
|
1 |
r2sinθ dϕdθdr = |
∫2 ( |
)dθ |
1 dϕ ∫2 ( |
||||||||||||
|
r2 |
|||||||||||||||||
Ω |
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
|
|
0 |
0 |
|
|
|
π2 |
|
|
|
|
|
|
|
|
|
π2 |
|
|
π2 |
|
|
|
=2π 2 |
∫sinθ r |
2 |
|
2a cosθ |
dθ =4a |
π ∫sinθ cos θdθ =−4a π ∫cos θd cosθ = |
||||||||||||
|
||||||||||||||||||
|
0 |
|
||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
2 |
2 |
2 |
2 |
|
|
|||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
=−4a |
0 |
|
|
dt =4a |
1 |
|
dt =3 a π. |
|
|
|
|
|
||||||
π ∫t |
2 |
π ∫t |
2 |
|
|
|
|
|
||||||||||
2 |
|
|
|
|
|
|
2 |
|
4 |
2 |
|
|
|
|
|
|||
|
|
1 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
2a cosθ}.
sinθ |
2a ∫cosθ rdr )dθ = |
|
0 |
№ 36.3.
Из физических понятий очевидно, что центр масс однородного тела с круговой симметрией находится на его оси: (x0 , y0 , z0 )=(0,0,?). Цель приведенных ниже расчетов,
в частности, показать адекватность математических формул интуитивным представлениям.
Объем V ограничен верхней половиной “смещенной” сферы
x2 + y2 +(z − a2 )2 =(a2 )2
радиуса a2 с центром в точке (0, 0, a2 )и конусом z = x2 + y2 :
Найдем массу тела:
m =∫∫∫ρ(x, y, z)dxdydz =
V
=∫∫∫x2 + y12 + z2 dxdydz =→
V
Учитывая вид подынтегральной функции f (x2 + y2 + z2 ) и “сферическую” форму объема
V (Сравнить с № 35.5), перейдем к сферическим координатам. Поскольку
z = x2 + y2 |
→ r cosθ = r2 sin2 θ |
tgθ =1 θ =π |
, |
|
|
4 |
|
x2 + y |
2 + z2 =az → r2 =ra cosθ |
r =a cosθ, |
|
то
|
|
2 |
|
2 |
|
|
2 |
|
2 |
+(z − |
a |
2 |
a |
2 |
|
|
π |
|
V ={z ≥ |
x |
|
+ y |
|
, |
x |
|
+ y |
|
2 ) |
|
≤(2 ) |
} → Ω={0 |
≤ϕ ≤2π, |
0 ≤θ ≤ |
4 |
, 0 ≤r ≤a cosθ}. |
Имеем:
|
|
|
|
|
|
2π |
|
|
π |
a cosθ |
|
|
|
|
|
|
|
π |
|
a cosθ |
|
|
|
|||||||
|
|
|
|
|
|
4 |
|
|
|
|
|
|
4 |
|
|
|
|
|||||||||||||
→=∫∫∫ |
1 |
r2sinθ dϕdθdr = ∫ |
|
|
∫( |
|
|
∫ |
sinθ |
dr |
|
)dθ |
|
dϕ =2π ∫( |
sinθ |
∫ |
1 dr |
)dθ = |
||||||||||||
r2 |
|
|||||||||||||||||||||||||||||
|
|
Ω |
0 |
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
||||||
|
|
|
π |
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
4 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
=−πa (cos |
|
|
|
|
0) |
|
|||||
|
=2πa∫sinθ cosθdθ =−2πa∫cosθd cosθ =−2πa |
1 |
2 |
|
|
2 π |
−cos |
2 |
πa |
|||||||||||||||||||||
|
|
|
4 |
|||||||||||||||||||||||||||
|
|
2 cos θ |
|
0 |
4 |
|
= 2 . |
|||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Далее найдем |
координаты центра масс, учитывая симметрию тела относительно |
|||||||||||||||||||||||||||||
координатных |
плоскостей |
xOz, |
yOz |
и |
нечетность |
подынтегральных |
функций |
|||||||||||||||||||||||
относительно переменных x, |
y : |
|
|
|
|
+ z2 dxdydz =0, |
|
|
|
|
|
|
|
|
||||||||||||||||
x0 |
= m ∫∫∫xρ (x, y, z)dxdydz = m ∫∫∫x x2 + y2 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y0 |
|
|
V |
|
|
|
|
V |
|
|
|
|
+ z2 dxdydz =0. |
|
|
|
|
|
|
|
||||||||||
= m ∫∫∫yρ (x, y, z)dxdydz = m ∫∫∫y x2 + y2 |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
z0 |
= m ∫∫∫zρ |
(x, y, z)dxdydz = m ∫∫∫z x2 |
+ y2 |
+ z2 |
dxdydz = m ∫∫∫r cosθ r2 |
||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
1 |
|
|
1 |
||||
|
|
|
|
|
V |
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
Ω |
|
|
|
|
|
|
1 |
|
2π |
|
π |
|
a cosθ |
|
|
|
|
|
|
|
2π |
π |
|
|
|
a cosθ |
|
|
||
|
|
|
4 |
( |
|
|
|
)dθ |
|
4 |
( cosθ sinθ |
|
|
||||||||||||
|
|
m ∫ |
|
∫ |
∫ |
|
|
|
|
|
m |
∫ |
∫ |
|
|
||||||||||
|
= |
|
|
|
0 |
|
0 |
0 |
r cosθ sinθ dr |
dϕ = |
|
|
0 |
0 |
r dr |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
r2sinθ dϕdθdr =
)dθ =
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
π |
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
a cosθ |
|
|
|
2 |
4 |
|
|
|
|
|
2 |
4 |
|
|
|
|
||||
= 2mπ 12 ∫cosθ sinθ |
r2 |
|
|
|
dθ = |
πma |
∫cos3 θ sinθ |
dθ =−πma |
∫cos3 θ dcosθ = |
|||||||||||||||||||||||||
|
|
|
0 |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
πa2 |
|
4 |
|
|
|
|
π |
πa2 |
|
|
|
4 π |
|
|
|
|
4 |
πa2 |
|
1 |
|
3πa2 |
|
3a |
|
|||||||||
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
=− 4m cos |
|
θ |
|
0 =− 4m |
(cos |
4 |
−cos |
|
0)=− 4m |
( |
22 |
|
−1)= 16m |
= |
8m |
. |
||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
№ 36.4. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V =∫∫∫1 dxdydz =→ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Объем V ограничен верхней частью сферы |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
радиуса a |
|
|
x2 + y2 + z2 =a2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
с |
центром |
|
|
|
в |
начале |
координат |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
(0,0,0) и конусом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
x2 |
+ y2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
z = |
|
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Учитывая “сферическую” форму объема V , |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
перейдем к сферическим координатам. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
Поскольку |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z = |
x2 + y2 |
|
|
|
→ r cosθ = |
|
1 |
r2 sin2 θ |
|
|
tgθ = 3 |
|
θ =π , |
||||||||||||||||||||
|
|
|
|
|
|
|
3 |
|
||||||||||||||||||||||||||
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 + y2 + z2 =a2 → r2 =a2 r =a, |
|
|
|
|
|||||||||||||||
то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V ={z ≥ |
|
x2 + y2 |
, x2 + y2 + z2 ≤a2 } → Ω={0 ≤ϕ ≤2π, 0 ≤θ ≤π |
, 0 ≤r ≤a}. |
||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
||||||
Имеем:
|
|
|
|
|
|
|
|
2π |
|
π |
|
a |
|
|
|
|
π |
|
a |
|
|
∫∫∫ |
2 |
|
|
|
|
|
|
3 |
( |
|
2 |
sinθ dr )dθ |
|
3 |
|
2 |
|||
→= |
r sinθ dϕdθdr = |
∫ |
|
∫ |
∫ |
r |
|
|
∫ |
sinθdθ |
∫ |
r dr = |
||||||||
|
|
|
|
|
|
dϕ =2π |
|
|
||||||||||||
|
Ω |
|
|
|
|
|
|
0 |
|
0 |
|
0 |
|
|
|
|
0 |
|
0 |
|
= |
2π (−cosθ) |
|
π3 |
1 r3 |
|
a |
= |
2π 1 |
1 a3 |
=π a3. |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||||||||||||
№ 36.5. |
|
|
0 |
3 |
|
0 |
|
|
2 |
3 |
|
|
3 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
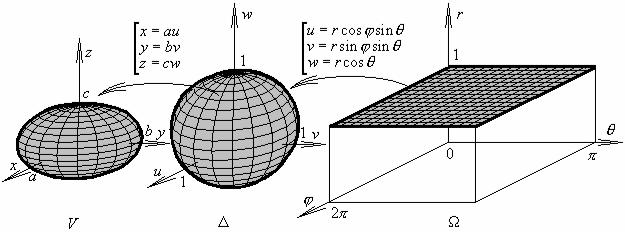
V =∫∫∫1 dxdydz =→
V
Перейдем от старых координат (x, y, z) к промежуточным (u,v, w) , полагая что:
x =au |
|
|
|
|
|
|
|
|
|
D(x, y, z) |
|
|
|
|
|
|
|
xu′ xv′ xw′ |
|
|
|
|
a 0 0 |
|
dudvdw=abc dudvdw |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
y =bv |
|
|
|
|
|
dxdydz = |
|
|
dudvdw= |
|
y′ |
|
y′ |
y′ |
|
dudvdw= |
|
0 |
b 0 |
|
||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
z =cw |
|
|
|
|
|
|
|
|
|
D(u, v, w) |
|
|
|
|
|
|
|
u |
|
v |
w |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
zu′ zv′ zw′ |
|
|
|
|
0 0 c |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V ={ |
x2 |
|
+ |
y2 |
+ |
z2 |
|
≤1}→∆={u2 +v2 +w2 ≤1}. |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a2 |
|
c2 |
|
|
|
|||||||||||||||||
|
|
|
D(x, y, z) |
|
|
|
|
|
|
|
|
|
|
b2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
→=∫∫∫ |
|
|
dudvdw=∫∫∫abc dudvdw=→ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
D(u, v, w) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
∆ |
|
|
|
|
|
|
|
|
|
∆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Переходя далее от промежуточных координат (u,v, w) к сферическим (r,θ,ϕ) |
|
|
|
|||||||||||||||||||||||||||||||||
u =r cosϕ sinθ |
dudvdw=r 2sinи dϕdθdr ∆→Ω={0 ≤ϕ ≤2π, 0≤θ ≤π, |
0≤r ≤1}, |
||||||||||||||||||||||||||||||||||
v =r sinϕ sinθ |
||||||||||||||||||||||||||||||||||||
w=r cosθ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
находим: |
|
|
|
|
|
|
|
2π |
|
π |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
1 |
|
|
||||
|
∫∫∫ |
|
2 |
|
|
|
|
|
|
( |
|
|
2 |
|
|
|
|
|
)dθ |
|
|
|
|
|
|
2 |
||||||||||
→=abc |
r |
|
sinθ |
|
dϕdθdr =abc |
|
∫ |
|
∫ |
∫ |
r sinθ dr |
|
=2πabc |
∫ |
sinθdθ |
∫ |
r |
dr = |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
dϕ |
|
|
|||||||||||||||||||||||
|
|
|
Ω |
|
|
|
|
|
|
|
0 |
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
|
|
|
=2πabc 2 13 = 43 πabc.
Получена полезная формула объема эллипсоида V = 43 πabc . В частности, объем шара
радиуса R = a = b = c равен V = 4 π R3 . |
||||||
|
|
|
3 |
|
|
|
Замечание. Координаты (r,θ,ϕ) |
для исходных декартовых координат (x, y, z) получили |
|||||
название обобщенных сферических координат |
||||||
x =ar cosϕ sinθ |
|
|
D(x, y, z) |
|
=abc r 2sinи |
|
|
|
|||||
y =br sinϕ sinθ |
|
|
||||
D(r,θ,ϕ) |
||||||
z =cr cosθ |
|
|
|
|
||
|
|
|
|
|
|
|
37. Криволинейные интегралы по длине (масса, заряд)
Условия.
№ 37.1. |
Найти массу кривой L с линейной плотностью ρ = ρ(x, y, z) : |
|
|
||||||||||||
|
x = cost |
|
L = |
|
x |
= ch t |
|
|
|
||||||
L = |
y = sin t , t [0,2π] |
, |
|
y |
= sh t , t |
[0,1] , |
|
|
|||||||
|
z = t |
|
|
|
|
|
z |
= t |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ρ = x |
2 |
+ y |
2 |
z |
|
ρ = |
|
|
z |
|
|
|
|
|
|
|
|
|
|
1+ x2 + y2 |
|
|
|
||||||||
№ 37.2. |
Найти заряд кривой L с линейной |
плотностью заряда ρ = ρ(x, y, z) : |
|
||||||||||||
|
x = e−t cost |
|
|
|
|
x = cos e−t |
|
|
|
||||||
|
|
|
|
L = |
y = sin e−t |
, t [0, +∞) |
|
||||||||
L = |
y = e−t sin t , t [0,+∞) , |
|
, |
||||||||||||
|
|
|
|
|
|
|
|
|
|
= e−t |
|
|
|
||
z = e−t |
|
|
z |
|
|
||||||||||
ρ = xyz |
|
|
|
|
ρ = xyz |
|
|
|
|
|
|
||||
№ 37.3. Найти центр масс однородной кривойL : |
|
|
|
|
|
|
|
|
|||||||
|
x = cost |
|
|
|
x = e−t cost |
|
|
||||||||
L = |
y = sin t , t [0,2π] |
|
|
y = e−t sin t , t [0,+∞) |
, |
||||||||||
L = |
|
||||||||||||||
|
z = t |
|
|
|
|
|
|
−t |
|
|
|
||||
|
|
z = e |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
№ 37.4. |
Найти длину кривойL : |
|
|
|
|
|
|
|
|
|
|
||||
|
x = t cos |
2t |
|
|
|
y = t sin |
2t , t [0,1] |
, |
|||
L = |
|
||||
|
|
|
|
|
|
z = t |
|
|
|
x = t cost −sin t |
|
, |
L = |
y = t sin t + cost , t [0,1] |
|
|
|
z = t |
|
|
|
|
|
|
Теория.
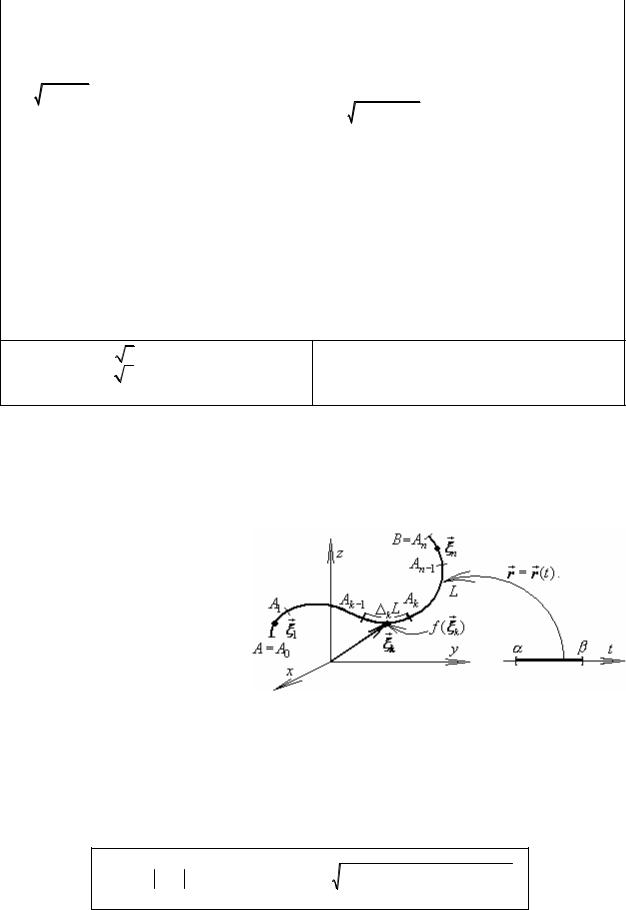
Пусть дана простая гладкая кривая
|
x =x(t) |
L ={r =r (t), t [α, β]}= |
y = y(t), t [α, β] |
|
z =z(t) |
|
|
|
( |
′ |
′ |
|
непрерывная r (t) , причем |
r (t) ≠ 0) , |
|
|
|
|
|
на которой распределена масса (заряд) с заданной линейной непрерывной плотностью
ρ = f (r ) = f (x, y, z) .
Найдем массу (заряд) кривой. Разобьем кривую L на малые части Lk длины ∆k L и выберем
на них промежуточные точки ξk . Тогда масса m (заряд q ) равна:
n |
|
n |
m =∑ |
∆k m = lim |
∑ |
k =1 |
d →0 |
k =1 |
|
n
f (ξk )∆k L = lim ∑ f (ξk ,ηk ,ζk )∆k L .
d →0 k =1
Полученный предел называется криволинейным интегралом по длине от функции f (r ) по кривой L и обозначается:
∫f (r )dL =∫f (x, y, z)dL .
L L
Он может быть сведен к следующему определенному:
ββ
∫f (r (t)) r′(t) dt =∫f (x(t), y(t), z(t)) (xt′(t))2 +(yt′(t))2 +(zt′(t))2 dt .
αα
Решения.
№ 37.1.
m =∫ρ(x, y, z)dL =∫ |
x2 + y2 |
z dL =[x =cos t, |
y =sin t, |
|
z =t; |
|
0 ≤t ≤2π ]= |
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
L |
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
2∫π |
|
x2 + y2 |
z |
|
x′2 + y′2 + z′2 dt = |
2∫π |
|
cos2 t +sin2 t |
t |
cos′2 t +sin′2 t +t′2 dt = |
|
|
|
||||||||||||||||||||||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2π |
|
|
|
|
|
(2π )2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
= ∫ |
1 t |
|
|
2 |
t +cos |
2 |
t |
2 |
|
dt = |
2 ∫tdt = 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
sin |
|
|
+1 |
|
|
2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ 37.2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=e |
−t |
cos t, |
|
y =e |
−t |
sin t, z =e |
−t |
; |
|
|
|
= |
|
|
|
|||||||||||
q =∫ρ(x, y, z)dL =∫x y z dL = x |
|
|
|
|
0 ≤t <+∞ |
|
|
|
||||||||||||||||||||||||||||||||||||||
|
L |
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
=+∞∫x y z |
x′2 + y′2 + z′2 dt =+∞∫e−t |
cos t e−t |
sin t e−t |
(e−t cos t )′2 +(e−t sin t )′2 +(e−t )′2 dt = |
||||||||||||||||||||||||||||||||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
+∞ |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
+∞ |
|
|
|
|
|
3 |
( |
|
) |
|
+∞ |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
= ∫e |
−4t |
cos t |
sin t |
3dt = |
|
∫e |
−4t |
|
sin 2t dt = |
|
Im ∫e |
(−4+i2)t |
dt = |
e |
−4+i2 t |
|
|
= |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Im −4 +i2 |
|
0 |
|||||||||||||||||||||||||||||||||
|
|
2 |
|
|
|
2 |
|
2 |
||||||||||||||||||||||||||||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
=− |
|
3 |
Im |
1 |
|
=− |
|
3 |
Im |
|
−4 −i2 |
|
=− |
3 |
|
|
|
−2 |
= |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
2 |
−4 +i2 |
|
|
42 +22 |
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 42 +22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
№ 37.3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
При |
нахождении |
центра |
масс |
|
|
неоднородной кривой |
|
L |
с |
линейной |
|
|
плотностью |
|||||||||||||||||||||||||||||||||
ρ =ρ(r ) =ρ(x, y, z) |
и массой |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m =∫ρ(r )dL =∫ρ(x, y, z)dL |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
воспользуемся определением центра масс системы материальных точек. Разобьем
кривую L точками на малые части Lk , |
с массами |
∆k m ≈ ρ(ξk )∆k L = ρ(ξk ,ηk ,ζk )∆k L , |
||||||||||||||
настолько малые, |
что |
каждую можно |
рассматривать как материальную точку |
|||||||||||||
ξk =(ξk ,ηk ,ζk ) . Тогда: |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
∫xρ(x, y, z)dL |
|||
|
|
|
|
|
|
|
|
|
x0 |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
1 |
n |
n |
|
|
∫r |
|
|
|
|
|
|
|
|
∫yρ(x, y, z)dL |
|
r0 ≈ |
∑ξk ∆k m ≈ |
1 |
∑ξk |
ρ(ξk )∆k L d→→0 |
1 |
ρ(r )dL |
y0 |
|
= |
1 |
|
|||||
m |
m |
m |
m |
|||||||||||||
|
|
k =1 |
k =1 |
|
|
L |
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
∫zρ(x, y, z)dL |
||||
|
|
|
|
|
|
|
|
|
z0 |
= |
||||||
|
|
|
|
|
|
|
|
|
m |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
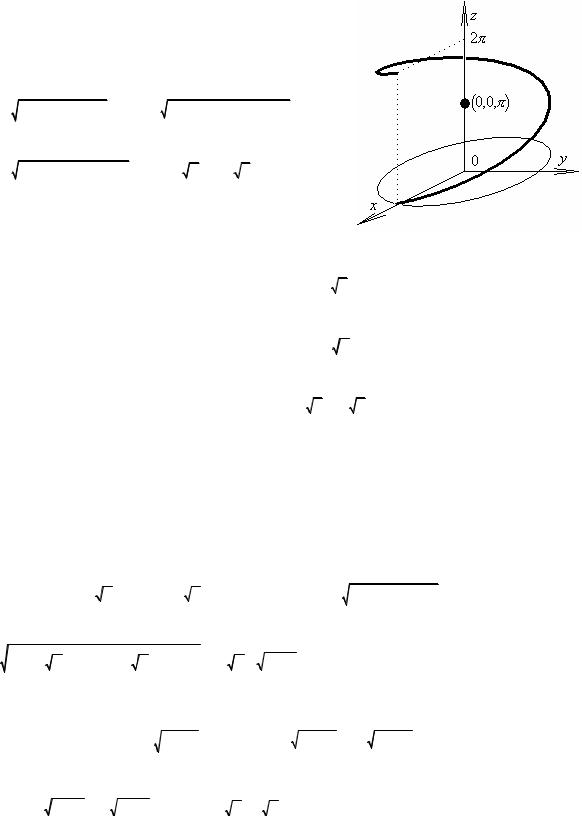
Из физических соображений очевидно, что центр масс однородной винтовой линии находится на ее оси: (x0 , y0 , z0 ) = (0,0,π ). Цель приведенных ниже расчетов, в частности,
убедиться в адекватности математических формул интуитивным представлениям. Найдем массу кривой
m =∫ρ(x, y, z)dL =∫ρ dL =
L |
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
=[x =cos t, y =sin t, z =t; |
0≤t ≤2π ]= |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
=ρ |
2∫π |
x′2 + y′2 + z′2 dt = ρ |
2∫π |
|
cos′2 t +sin′2 t +t′2 dt = |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
=ρ |
2∫π |
sin2 t +cos2 t +12 dt = ρ |
2∫π |
2dt =2 |
2πρ. |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Далее найдем координаты центра масс: |
|
|
|
|
|
2∫π cos t |
|
|
|
|
|||||||||||||||||||||||||
x0 = |
1 |
|
|
∫xρ (x, y, z)dL = |
1 |
|
|
∫xρdL = |
ρ |
∫xdL = |
ρ |
2dt =0, |
|
||||||||||||||||||||||
|
m |
m |
m |
m |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
0 |
|
|
|
|
|
y0 = |
1 |
|
∫yρ (x, y, z)dL = |
1 |
∫yρdL = |
ρ |
∫ydL = |
ρ |
2∫π sin t |
2dt =0, |
|
||||||||||||||||||||||||
m |
m |
m |
m |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
0 |
|
|
|
|
||
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
ρ |
|
|
ρ |
2π |
|
ρ (2π )2 |
||||||||||||||
z0 = |
∫zρ (x, y, z)dL = |
∫zρdL = |
|
∫zdL = |
|
|
∫t 2dt = 2 |
|
2 |
=π. |
|||||||||||||||||||||||||
m |
m |
m |
m |
m |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
0 |
|
|
|
|
|
№ 37.4.
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2t, |
y =t sin |
2t, z =t; |
|
x′ |
2 |
+ y′ |
2 |
+ z |
′ |
2 |
dt = |
L =∫1 dL = x =t cos |
0 ≤t ≤1 =∫ |
|
|
|
|||||||||
L |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
=∫1 |
(t cos 2t )′2 +(t sin |
2t )′2 +t′2 dt = 2 ∫1 |
1+t2 dt =→ |
|
|
|
|
|
|
|
|
||
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
Воспользовавшись ранее найденным интегралом (см. № 23.3.) |
|
|
|
|
|
||||||||
|
|
L =α∫ 1+ϕ2 dϕ = 12 (ln (α+ 1+α2 )+α 1+α2 ), |
|
|
|
||||||||
получим |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
→= 1 |
(ln (1+ 1+12 ) |
+1 1+12 )= 1 |
(ln (1+ 2 )+ |
2 ). |
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|

38. Криволинейные интегралы по координатам (работа силы)
Условия.
№ 38 1. |
Найти работу силы F при перемещении материальной точки из начала A в |
|||||||||
конец B кривой LAB . |
|
|
|
|
|
|
|
|
||
LAB = |
|
x = ch t |
|
|
y |
|
x = cost |
|
z |
|
|
y = sh t , t [−1, |
+1] |
, |
F = z |
LAB = |
y |
= sin t , t [−π, +π] |
, F = x |
||
|
|
z = t |
|
|
x |
|
z |
= t |
|
y |
|
|
|
|
|
|
|
|
|
|
|
№ 38 2. |
Найти работу силы FTP |
трения |
№ 38.2. |
Найти работу силы FC |
|
|||||
при перемещении материальной точки по |
сопротивления воздуха при перемещении |
|||||||||
плоской кривой |
|
|
|
материальной точки по кривой |
|
|||||
LAB = |
|
x = x(t) |
β] |
|
|
|
x = x(t) |
|
|
|
|
y = y(t), t [α, |
|
|
LAB = |
y |
= y(t), t [α, β] |
|
|
||
|
|
|
|
|
|
|
z |
= z(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
№ 38.3. |
Найти работу силы FT |
тяготения, |
№ 38.3. |
Найти работу силы Fy |
|
|||||
создаваемой материальной точкой массой |
упругости, создаваемой бесконечно |
|||||||||
M , находящейся в начале координат, при |
растяжимой пружиной прикрепленной к |
|||||||||
перемещении материальной точки массой |
началу координат, при перемещении |
|||||||||
m по кривой |
|
|
|
материальной точки по кривой |
|
|||||
LAB = |
|
x = x(t) |
β] |
|
|
|
x = x(t) |
|
|
|
|
y = y(t), t [α, |
|
|
LAB = |
y |
= y(t), t [α, β] |
|
|
||
|
|
z = z(t) |
|
|
|
|
z = z(t) |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
№ 38.4. |
Найти работу векторного поля F (r ) = grad u(r ) |
при перемещении |
|
|||||||
материальной точки из начала A конец B кривой LAB . |
|
|
|
|||||||
LAB = |
|
x = x(t) |
β] |
|
|
|
x = x(t) |
|
A = B |
|
|
y = y(t), t [α, |
|
|
LAB = |
y |
= y(t), t [α, β] |
, |
|||
|
|
z = z(t) |
|
|
|
|
z |
= z(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
Теория.
Пусть дана простая гладкая кривая
|
x =x(t) |
L ={r =r (t), t [α, β]}= |
y = y(t), t [α, β] |
|
z =z(t) |
|
|
|
( непрерывная r′(t) , причем r′(t) ≠0) , |
|
|
воспринимаемая, как траектория движения материальной точки. Тогда для любых двух точек A1(r (t1)) и A2 (r (t2 )) можно сказать, что одна из них A1 встретится раньше
другой A2 , понимая под этим, что t1 < t2 . Таким образом, конкретная параметризация
автоматически задает направление движения вдоль кривой или, как говорят, ориентацию. В частном случае, когда кривая простая (без точек самопересечения), направление движения однозначно определяется указанием одной из концевых точек A или B в качестве начала или конца. Поэтому простые кривые с заданной ориентацией обозначаются LAB (или LBA ). Если дополнительно кривая гладкая, то направление
движения можно определить, задав непрерывное поле единичных векторов касательных
ф(r ) =τ (r (t)) = rr′′((tt)) (или −τ (r ) ).