

2799.Теория механизмов и механика систем машин в задачах и решениях учебно
..pdfМинистерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Пермский национальный исследовательский политехнический университет»
Е.В. Поезжаева
ТЕОРИЯ МЕХАНИЗМОВ
ИМЕХАНИКА СИСТЕМ МАШИН
ВЗАДАЧАХ И РЕШЕНИЯХ
ДопущеноУМОвузовпообразованиювобластиавтоматизированного машиностроениявкачествеучебногопособиядлястудентов высшихучебныхзаведений, обучающихсяпонаправлениямподготовки «Технология, оборудованиеиавтоматизация машиностроительных производств», «Конструкторско-технологическоеобеспечение машиностроительных производств»
Издательство Пермского национального исследовательского
политехнического университета
2011
1
УДК 621.01.001.63 + 621:658.512.22.011.56] (075.6) ББК 34.42я73
П46
Рецензенты:
профессор ПИЖД УрГУПС В.Ф. Олонцев;
профессор Пермского национального исследовательского политехнического университета, академик Академии транспорта
Б.С. Юшков
Поезжаева, Е.В.
П46 Теория механизмов и механика систем машин в задачах и решениях: учеб. пособие / Е.В. Поезжаева.– Пермь: Изд-во Перм. нац. иссл. политехн. ун-та, 2011. – 539 с.
ISBN 978-5-398-00637-7
Изложены основы теории механизмов и машин, а также приведены задачи и решения по данной дисциплине. Представлены алгоритмы расчетов в графической и аналитической формах проектирования механизмов и машин. Даны методики проектирования структурной и кинематической схем механизма по основным и дополнительным условиям, а также силовой анализ механизма с учетом геометрии масс звеньев при движении их с ускорением. Рассмотрена динамика машин с защитой механизмов от механических колебаний. Даны методика проектирования зубчатых передач и определение их качественных показателей. Разработан анализ механизмов с прерывистым движением выходного звена и синтез кулачковых механизмов.
Содержание соответствует Государственному образовательному стандарту высшего профессионального образования и методическим требованиям, предъявляемым к учебным изданиям.
Предназначено для студентов машиностроительной и автодорожной специальностей.
УДК 621.01.001.63 + 621:658.512.22.011.56] (075.6) ББК 34.42я73
ISBN 978-5-398-00637-7 |
ПНИПУ, 2011 |
2
1. СТРОЕНИЕ МЕХАНИЗМОВ
1.1. Теоретическая часть
Теория механизмов и машин (ТММ) есть наука, изучающая строение, кинематику и динамику механизмов и машин в связи с их анализом и синтезом.
Машинами называются такие искусственные устройства, которые предназначены для облегчения физического и умственного труда человека, увеличения его производительности, для полной или частичной замены человека.
По выполняемым функциям машины можно разделить на следующие классы:
1)энергетические (машины-двигатели);
2)технологические;
3)транспортные;
4)контрольно-управляющие;
5)логические;
6)кибернетические;
7)промышленные роботы и манипуляторы.
Машины-двигатели предназначены для преобразования одного вида энергии в другой. Примерами энергетических машин являются электрические двигатели, двигатели внутреннего сгорания, турбины.
Наиболее обширен класс технологических машин, которые предназначены для выполнения технологических процессов, связанных с изменением свойств, состояния, формы или положения обрабатываемого материала или объекта (станки, текстильные машины, машины сельского хозяйства, полиграфические, пищевые и др.). К транспортным машинам относятся локомотивы, автомобили, тракторы, лифты и т.д.
Аппаратом называются искусственные устройства, в которых происходят различные химические, тепловые, электрические и другие процессы, необходимые для изготовления или обработки изделий, продукта, материала.
Огромное значение для развития всех отраслей современного производства имеет внедрение методов контроля обрабатываемых объектов. Устройства, используемые для этой цели, называются приборами.
Развитое машинное устройство, состоящее из двигателя, передаточных механизмов и рабочей машины, называется машинным агрегатом.
3
Машины называются автоматами, если все технологические процессы осуществляются ими без содействия человека, но под его контролем. В некоторых отраслях промышленности автоматы, выполняющие последовательные операции по превращению заготовки (сырья) в готовые изделия, составляют непрерывную автоматическую линию.
Принципиально новыми элементами современных технических систем являются промышленные роботы, которые состоят из манипулятора исистемы управления ими, причем управление может осуществляться чело- веком-операторомпожесткой программе илиискусственным интеллектом.
Манипулятор – техническое устройство, предназначенное для воспроизведения функций рук человека и дистанционно управляемое оператором или программным устройством.
Промышленные роботы позволяют совместить в едином цикле технические операции, повысить производительность труда и завершить комплексную механизацию и автоматизацию производства.
Таким образом, главное отличие ТММ от учебных дисциплин, изучающих методы проектирования специальных машин, в том, что ТММ основное внимание уделяет изучению методов синтеза и анализа, общих для данного вида механизма, не зависящих от его конкретного функционального назначения. Специальные дисциплины изучают проектирование механизмов данного конкретного назначения, уделяя основное внимание специфическим требованиям. При этом широко используются и общие методы синтеза и анализа, которые изучаются в курсе ТММ.
Механизм есть система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения других тел.
Твердые тела, из которых образуется любой механизм, называются звеньями. Каждое звено представляет собой одну деталь либо совокупность нескольких деталей, жестко соединенных между собой.
Звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев, называется входным звеном.
Звено, совершающее движение, для выполнения которого предназначен механизм, называется выходным звеном.
Кинематической парой называется соединение двух соприкасающихся звеньев, допускающее их относительное движение.
Класс кинематической пары определяется числом ограниченных ею относительных перемещений звеньев, т.е. числом связей.
Число независимых возможных перемещений звена называется чис-
лом степеней подвижности.
4
Для любой кинематической пары сумма числа налагаемых на нее связей и числа допускаемых движений всегда равна 6, т.е. числу степеней свободы твердого тела.
Поверхности, линии, точки звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называются элементамикинематическойпары.
По характеру соприкосновения звеньев, т.е. в зависимости от вида элементов кинематические пары, выделяются высшие и низшие.
Высшей называется кинематическая пара, в которой звенья соприкасаются по линии или в точке.
Низшей парой называется кинематическая пара, в которой звенья соприкасаются по поверхности.
Кинематической цепью называется связанная система звеньев, образующих между собой кинематические пары.
Кинематическая цепь называется плоской, если траектории всех точек звеньев лежат в параллельных плоскостях. Если точки звеньев кинематической цепи описывают неплоские траектории или траектории, лежащие в пересекающихся плоскостях, то кинематическая цепь называется пространственной.
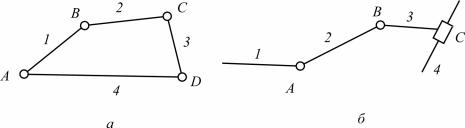
Кинематическая цепь называется замкнутой, если каждое звено входит не менее чем в две кинематические пары (рис. 1.1, а).
Кинематическая цепь называется незамкнутой, если она содержит хотя бы одно звено, входящее лишь в одну кинематическую пару (рис. 1.1, б).
Рис. 1.1. Кинематическая цепь: а – замкнутая; б – незамкнутая; A, B, C, D – кинематические пары; 1, 2, 3, 4 – звенья
В зависимости от характера совершаемого движения звенья механизмов имеют следующие названия.
Стойкой называется неподвижное звено механизма.
Звено, совершающее вокруг неподвижной оси поворот на угол 2π, называется кривошипом; коромыслом, если его угол поворота менее 2π.
5
Звено, перемещающееся вдоль подвижной или неподвижной направляющей, называется ползуном.
Кулисой называется звено, вращающееся вокруг неподвижной оси и служащее направляющей для ползуна.
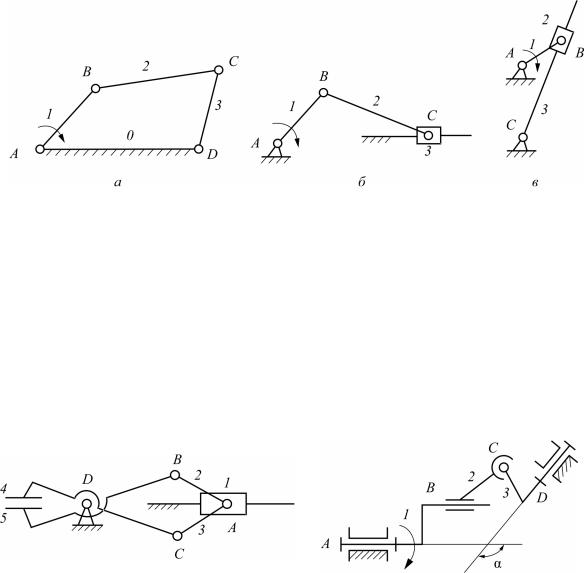
На рис. 1.2, а приведена схема четырехзвенного кривошипно-коромыс- лового механизма (звено 1 – кривошип, звено 2 – шатун, звено 3 – коромысло, звено 0 – стойка). Такой механизм называется шарнирным, так как у него все кинематические пары – вращательные.
На рис. 1.2, б показан кривошипно-ползунный механизм, у которого звено 1 – кривошип, звено 2 – шатун, звено 3 – ползун.
У кулисного механизма (рис. 1.2, в) звено 1 – кривошип, звено 2 – ползун, звено3 – кулиса.
Рис. 1.2. Четырехзвенный кривошипно-коромысловый (а), кривошипно-ползунный (б) и кулисный (в) механизмы
Все эти механизмы плоские, так как их звенья совершают плоское движение параллельно одной и той же неподвижной плоскости.
Нарис. 1.3 приведенаструктурнаясхемамеханизмасхвата, применяемого впромышленных роботах, где звено 1 является ползуном, звенья 2 и3 – шатунами, звенья4 и5 – коромыслами. Этотакжеплоскиймеханизм.
Двухкривошипный пространственный четырехзвенный механизм (рис. 1.4) служит для передачи вращения от кривошипа 1 к кривошипу 3 при произвольном угле α между осями вращения.
Рис. 1.3. Механизм схвата |
Рис. 1.4. Двухкривошипный пространственный |
|
четырехзвенный механизм |
6
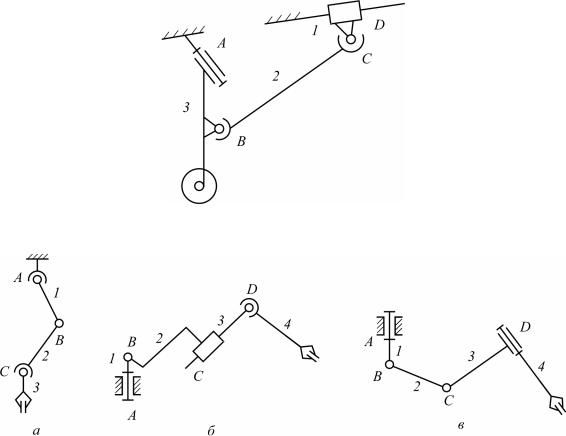
Структура пространственного механизма представлена на рис. 1.5. На рис. 1.6 приведены структурные схемы механизмов манипуляторов, которые представляют собой незамкнутые пространственные
кинематические цепи.
Рис. 1.5. Структура пространственного механизма
Рис. 1.6. Схемы манипуляторов с кинематическими парами:
а – трехподвижными; б – комбинированными; в – пятиподвижными
Если все кинематические пары механизма низшие, он называется рычажным (или стержневым).
1.2. Структурная формула механизма
Общее число степеней свободы n подвижных звеньев механизма до их соединения в кинематические пары равно 6n. Каждая кинематическая пара i-го класса отнимает у звеньев i степеней свободы. Общее число связей, налагаемых кинематическими парами механизма, равно
5р5 + 4р4 + 3р3 + 2р2 + р1,
где p5 – число пар 5-го класса, p4 – число пар 4-го класса и т.д.
7
Разность между общим числом степеней свободы подвижных звеньев механизма и числом связей, налагаемых кинематическими парами, определит число степеней подвижностей механизма:
W = 6n – 5р5 – 4р4 – 3р3 – 2р2 – р1. |
(1.1) |
Так, для механизма, показанного на рис. 1.4, имеем |
|
n = 3; р5 = 2; р4 = 1; р3 = 1; р2 = р1 = 0; |
|
W = 6 3 – 5 2 – 4 1 – 3 1 = 1. |
|
Для плоского механизма |
|
W = 3n – 2р5 – р4, |
(1.2) |
так как в плоском движении каждое подвижное звено до соединения в кинематические пары обладало тремя степенями свободы, а кинематические пары в плоскости механизма могут быть только одноподвижными (5-го класса) и двухподвижными (4-го класса).
К примеру, все плоские рычажные четырехзвенники, приведенные на рис. 1.2, имеют
n = 3; р5 = 4; р4 = р3 = р2 = р1 = 0;
W = 3 3–2 4 = 1.
Формулы (1.1) и (1.2) называются структурными формулами механизмов.
В механизмах с незамкнутыми кинематическими цепями число подвижных звеньев равно числу кинематических пар, и формула (1.1) принимает вид
W = р5 + 2р4 + 3р3 + 4р2 + 5р1,
т.е. число степеней свободы такого механизма равно сумме степеней свободы кинематических пар.
Так, для механизма манипулятора, показанного на рис. 1.6, а, имеем
W = р5 + 3р3 =1+3 2 = 7.
Для механизма манипулятора, показанного на рис. 1.6, б, имеем
W = р5 + 3р3 = 3 + 3 = 6.
Механизм манипулятора, приведенный на рис. 1.6, в, имеет
W = р5 = 4.
8
Такой же результат будет получен при подсчете числа степеней свободы механизмов с незамкнутыми кинематическими цепями по формуле (1.1).
Число степеней подвижностей манипулятора при неподвижном захвате называется маневренностью манипулятора. Приведенный на рис. 1.6, а манипулятор имеет одну степень маневренности, так как при неподвижном захвате его звенья могут вращаться вокруг оси, проходящей через центры сферических пар. Манипуляторы, показанные на рис. 1.6, б и 1.6, в, не имеют маневренности, т.е. каждому положению захвата соответствует единственное расположение всех звеньев.
Для определенности движения всех звеньев механизма число степеней подвижностей механизма должно соответствовать числу заданных независимых движений звеньев.
1.3. Принцип образования механизма
По методу Л.В. Ассура любой механизм может быть образован последовательным присоединением к входному звену и стойке структурных групп (групп Ассура). Входное звено со стойкой образует так называемый механизм 1-го класса, или начальный механизм.
Структурной группой называется кинематическая цепь, которая после присоединения к стойке элементами внешних кинематических пар имеет нулевую степень подвижности.
Следовательно, структурная группа пространственного механизма должна удовлетворять условию
6n – 5р5 – 4р4 – 3р3 – 2р2 – р1 = 0. |
(1.3) |
Для структурной группы плоского механизма это условие имеет вид |
|
3n – 2р5 – р4 = 0. |
(1.4) |
Для структурной группы плоского рычажного механизма это выра- |
|
жение еще упрощается: |
|
3n – 2р5 = 0. |
(1.5) |
Отсюда следует, что число звеньев плоской структурной |
группы |
с низшими парами всегда четное, а число пар кратно трем. |
|
Простейшей и самой распространенной является группа второго класса, состоящая их двух звеньев и трех кинематических пар (одна внутренняя и две внешние).
В зависимости от сочетания вращательных и поступательных пар структурные группы второго класса имеют 5 модификаций.
Ниже приведены схемы групп 2-го класса (группы Ассура) всех видов и механизмы, образованные присоединением этих групп ко входному звену и стойке.
9
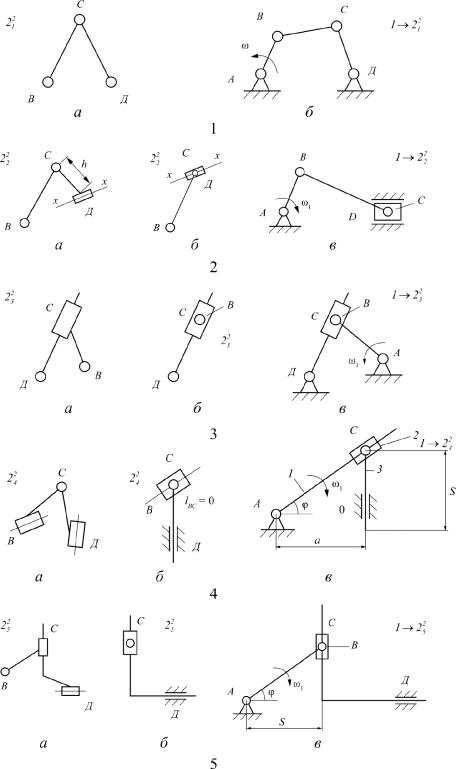
Рис. 1.7. Группы Ассура 2-го класса:
1 – шарнирный четырехзвенник: а – структурная группа 212 ; б – схема механизма; 2 – кривошипно-ползунный механизм: а, б – структурная группа 222 ; в – схема механизма;
3 – кулисный механизм: а, б – структурная группа 232 ; в – схема механизма; 4 – тангенсный механизм: а, б – структурная группа 224 ; в – схема механизма; 5 – синусный механизм: а, б – структурная группа 252 ; в – схема механизма
10