2π kM |
= |
2π k |
|
|
2 π k |
µ µ . |
∫ |
M |
Д |
(ϕ )dϕ = F |
C |
|
|
0 |
M ϕ |
|
|
0 |
|
|
|
|
После всех этих предварительных построений и расчетов можно определить и искомый момент инерции Jм махового колеса по формуле
|
= |
A |
= |
FизбµM µϕ |
|
J M |
|
изб |
|
|
. |
δω |
2 |
δω |
2 |
|
|
ср |
|
ср |
|
Избыточная площадь, нужная для вычисления величины JM, расположена над диаграммой МC(φ). Под ней расположена недостаточная площадь, и так как она равна избыточной, то для той же цели можно пользоваться и ею.
Вместо момента инерции в практике применяется понятие махового момента GD2, представляющего собой произведение веса маховика на квадрат eго о диаметра. Если считать, что на окружности с таким диаметром сосредоточена вся масса маховика, то можно написать так:
J M = G = D2 , g 4
откуда имеем
GD2 = 4gJM,
где g – ускорение силы тяжести.

Задачи по динамическому анализу механизмов
5.1. К валу О5 колеса 5, вра-
щающегося |
со скоростью |
n5 = |
= 500 об/мин, |
подводится |
мощ- |
ность N5 = 750 вт. Определить мо- |
мент М1, который можно |
снять |
с вала О1 колеса 1, если числа зубьев колес равны z1 = z2= 5, z3 = 60, z4 = 16, z5 = 30. Вертикальная сила, прижимающая ползун к направляющим, Q = 100 н, половина угла заострения клина β = 30° и коэффициент трения ползуна о направляющие f = 0,1.
5.2. Найти угловое ускорение звена АВ кривошипно-ползунного механизма(см. рис., а) скребковогоконвей-
ера втом положении |
его, |
когда |
φ= 270°. Дано: IАВ = 500 |
мм, |
IВC = |
= 1500 мм, угловая скорость кривоши-
па АВ ω= 10 с, масса |
ползуна |
3 |
m03 = 10 кг, максимальная |
масса |
за- |
грузки mmах= 50 кг, момент движущихся сил, приложенный к ведущему
звену АВ, МД = 400 нм. Массами кри-
вошипа ишатуна, |
а также трением |
вкинематических |
парах механизма |
итрениемдеталейостол4 пренебречь. Загрузка конвейера массами деталей изменяется согласно графику(б). Описаниеработыконвейера: приходеползуна влево (холостой ход машины) стол 4 не загружен, при ходе его вправо(рабочийход) ползун3 сдвигаетдетали, находящиеся на малом расстоянии одна от другой иимеющие массы, малые по сравнению с общей массой загрузки.
5.3. Спроектировать передачу, осуществляющую заданное движение звеньев 1 и 2 посредством центроид в относительном движении, если звено 1 должно вращаться с постоянной угловой скоростью V1 = = 1,0 с–1 , а звено 2 двигаться поступательно с постоянной скоростью V2 = 5 ммс–1 .
|
|
|
|
|
|
5.4. |
Тело 1 с |
массой m = |
|
= 100 кг |
лежит |
на |
наклонной |
|
плоскости и удерживается в со- |
|
стоянии равновесия грузом Q2, |
|
связанным с телом гибкой ни- |
|
тью, перекинутой через блок А. |
|
Пренебрегая трением в подшип- |
|
никах блока ижесткостью нити, |
|
определить, в каких пределах |
|
должна лежать величина массы |
|
m2 груза Q2 для поддержания |
|
равновесия всей системы, если |
|
угол наклона плоскости α = 30°, |
|
акоэффициент трения между те- |
|
лом1 иплоскостьюf = 0,5. |
|
|
5.5. |
Определить момент |
|
М1, который можно снять с ва- |
|
ла О1 |
колеса |
1 |
редуктора |
|
Н.П. Лопухова, |
если к ведуще- |
|
му валу ОН водила Н подво- |
|
дится момент М; числа зубьев |
|
OH |
колес |
равны |
z1 = 24, |
z2 = 5, |
|
|
z2' = 22, |
z3 = 26, |
z4 = 24, |
z5 = 5, |
|
z5' = 22, z6 = 26; коэффициент полезного действия каждой пары колесравенη = 0,98.
203
5.6.Тело А, нагруженное вертикальной силой Q, движется равномерно по плоскости хх. Определить, при каком угле β с горизонтом движущая сила F достигает своего наименьшего значения, если
коэффициент трения fx между телом А и плоскостью fx = 0,3.
5.7.Толкатель А, нагруженный силой Q = 5 Н, поднимается равномерно вверх силой F = 10 Н. Угол между направлением силы F и направлением движения штанги равен α. Определить наибольшую величину угла α, при котором движение толкателя возможно, если коэффициент трения между толкателем А и направляющими В равен f = 0,1, а расстояние х = 1.
5.8.Клиновой ползун 1 движется по горизонтальным направляющим 2 с постоянной скоростью. Определить величину движущей
силы FД, если сила полезного сопротивления FC = 100 Н и вертикальная сила, прижимающая пол-
зун к направляющей, равна Q = = 50 Н, коэффициент трения между ползуном и направляющими равен f = 0,1, половина угла заострения клинового желоба β = 30°.

5.9. Клиновой ползун 1 движется по горизонтальным направляющим 2, со скоростью V12 = = 0,5 мс–1 под воздействием движущей силы FД. Определить мощность N, затрачиваемую на преодоление трения в опорах ползуна.
5.10.Клиновой ползун 1 под воздействием горизонтальной силы F = 1000 Н двигается равномерно вверх по наклонному клиновому желобу 2. Определить вертикальную силу Q, прижимающую ползун
кжелобу, если коэффициент трения ползуна о желоб f = 0,13, половина угла β желоба равна 60° и угол наклона желоба 2 к горизонту α = 8°.
5.11.К ползуну 3 кривошипноползунного механизма приложена
сила F3 = 100 Н, а к кривошипу АВ– уравновешивающий момент Му, коэффициент трениямежду ползуном3 и направляющими хх равен f = 0,1;
размеры звеньев IАB = 100 мм, IВC = = 5,0 мм. При положении звена АВ, определяемом углом = 90°, найти реакцию Р23 в шарнире С (трением вшарнирах А и В механизма пренебречь). При решении рассмотреть случаи: а) трение между ползуном 3 и направляющими хх отсутствует; б) трение между ползуном и направляющими учитывается, ползун движется вправо; в) трение между ползуном и шатуном учитывается, ползундвижется влево.
5.12.На плоскости 2, наклонной
кгоризонту под углом α = 16°, находится ползун 1, нагруженный вертикальной силой F = 1000 Н. Коэффи-
циент трения ползуна |
о плоскость |
f = 0,12. Определить |
необходимую |
горизонтальную силу F, при которой возможно: а) равномерное движение ползуна вверх по плоскости; б) равномерное движение его вниз по плоскости.
5.13. Определить реакции в кинематических парах А, В, С и D шарнирного четырехзвенника и величину необходимого уравновешивающего момента Му, приложенного к звену
АВ, от нагрузки, |
приложенной |
к звеньям ВС и CD, если IАВ = 100 мм, |
IВC = ICD = 5,0 мм, угол |
φ1 = 45°, ось |
звена ВС горизонтальна, а ось звена CD вертикальна. Силы F2 и F3 приложены в точках К и М, делящих межшарнирные расстояния пополам; величины сил равны F2 = F3 = 5,0 Н, углы α2 и α3 равны 90°.
5.14. Определить реакции в кинематических парах А, В, С и D шарнирного четырехзвенника и величину необходимого уравновешивающего момента Му, приложенного к звену АВ, от нагрузки, приложенной к звеньям ВС и CD, если
IАВ = 50 мм, IВC = ICD = 5,0 мм, угол φ1 = = 90°, ось звена ВС горизонтальна, а ось
звена CD вертикальна. Силы приложены в точках К и М, делящих межшарнирные расстояния пополам, и равны F2 = F3 = 100 Н, углыα2 иα3 равны90°.
206
5.15. Определить реакции в кинематических парах А, В, С
иD шарнирного четырехзвенника
иуравновешивающий момент Му, приложенный к звену АВ, если
IАВ = 100 мм, IBC = ICD = 400 мм,
ось звена ВС горизонтальна, углы
φ1 = 90°, φ3 = 45°, сила F3 прило-
жена в точке К, делящей длину звена CD пополам, угол α3 = 90°;
F3 = 100 Н.
5.16. Определить |
реакции |
в кинематических парах |
А, В, С |
иD шарнирного четырехзвенника
ивеличину уравновешивающей
силы Fу, приложенной в точке К звена АВ перпендикулярно к его
оси (α1 = 90°) и делящей отрезок АВ пополам, от нагрузки, приложенной к звеньям ВС и CD, если
IАВ = 100 мм, IВC = ICD = 5,0 мм,
угол φ1 = 90°, ось звена CD вертикальна. Моменты пар, приложенных к звеньям ВС и CD, равны
М2 = М3 = 2 Нм.
5.17. Определить |
реакции |
в кинематических парах |
А, В, С |
и D кривошипно-ползунного механизма и уравновешивающий момент Му5, приложенный к звену АВ, от нагрузки Р3, приложенной кползуну 3, если IАВ = 100 мм, IВC =
=5,0 мм, угол φ1 = 90 ° и сила F3 =
=1000 Н.
207
5.18.Определить реакции
вкинематических парах А, В, С и D кривошипно-ползунного механизма и уравновешивающий
момент Му, приложенный к звену В, от нагрузки Р3, приложен-
ной к ползуну 3, если IАВ =
=100 мм, IВC = 5,0 мм, угол φ1=
=90° и сила F3 = 1000 Н.
5.19.Определить реакции в кинематических парах А, В, С
и D кривошипного механизма с качающимся ползуном и уравновешивающий момент МУ, приложенный к звену 1, от нагрузки Р2, приложенной к звену 2 (ку-
лисе) в точке К, если IАВ = 100 мм,
IBC = 5,0 мм, IВК = 100 мм, угол φ = 90°, сила F2 = 100 Н, угол α2 =
=90°
5.20.Определить реакции в кинематических парах А, В, С и D кулисного механизма Витворта и уравновешивающий
момент МУ, приложенный к звену АВ, от нагрузки, приложенной к звену 3 (кулисе), если IАВ =
=300 мм, углы φ1 = 90 °, φ3 = 90°,
момент, приложенный к звену 3, равен М3 = 60 Нм.
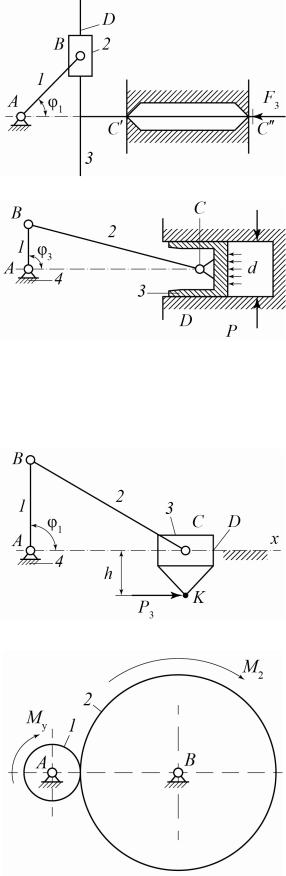
5.21. Определить реакциивкинематических парах А, В и D, и точках С' и С" синусного механизма и уравновешивающий момент Му, приложенный к звену АВ, от нагрузки Р3, приложенной к звену 3 (кулисе), если
IАB = 100 мм, IС'C" = 5,0 мм, угол φ1 =
=45°исилаF3 = 100 Н.
5.22.Определить реакции в кинематических парах А, В, С и D кри- вошипно-ползунного механизма от нагрузки, приложенной к днищу поршня 3, и уравновешивающий момент Му, приложенный к звену АВ,
если IАВ = 100 мм, IВC = 400 мм, угол φ1 = 90°, диаметр цилиндра d =
= 100 мм, давление газа в цилиндре p = 5 нcм–2.
5.23. Определить реакции в кинематических парах А, В, С и D криво- шипно-ползунного механизма и уравновешивающий момент Му, приложенный к звену АВ, от силы F3, приложенной горизонтально к точке К
звена 3, если IАВ= 100 мм, IВC = 5,0 мм, h = 58 м, φ1 = 90° исилаF3 = 100 Н.
5.24. Определить реакции в кинематических парах А, В и С кулачкового механизма и уравновешивающий момент Му от нагрузки Р2, приложенной к толкателю 2 под углом β, если IАO = 30 мм и прямая АО горизонтальна, радиус диска и кулачка R = 60 мм, β = 30°, сила
F2 = 100 Н.
5.25. Определить реакции в кинематических парах А, В
иточках С' и С" кулачкового механизма и необходимый уравно-
вешивающий момент Му, приложенный к кулачку, от нагрузки
Р2, приложенной к толкателю 2,
если φ1 = 45°, h = a = b = 100 мм
исила F2 = 100 Н.
5.26. Определить реакции вкинематических парах А и В одноступенчатой зубчатой передачи, если кколесу 2 приложен момент М2 = 5 нм, акколесу 1 – уравновешивающий момент Му. Модуль зацепления m = 10 мм, числа зубьев колес z1 = 5 иz2 = 80, угол зацепле-
нияα0 = 5°.
5.27.Определить реакцию
вкинематической паре В и урав-
новешивающий момент Му, приложенный к колесу 1 планетарного одноступенчатого редуктора, если к водилу Н приложен
момент МН = 18 Нм. Модуль зацепления m = 5 мм, числа зубьев
колес zl = 16, z2 = 5, z3 = 56, угол зацепления α0 = 5.







