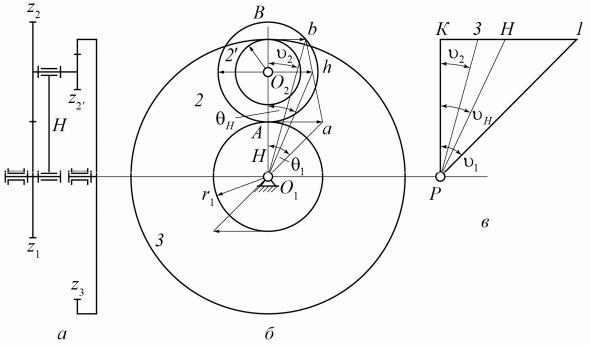
Угловые скорости остальных звеньев:
ω2 = (Р2) ω; ω3 = (Р3) ω; ωН = (РН) ω.
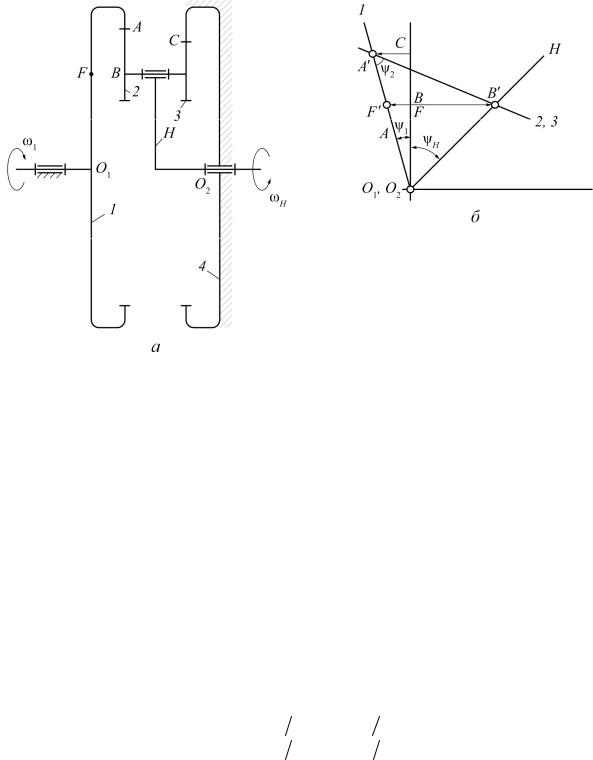
Используя план угловых скоростей, можно поределить направления относительных и абсолютных угловых скоростей, а также их значения.
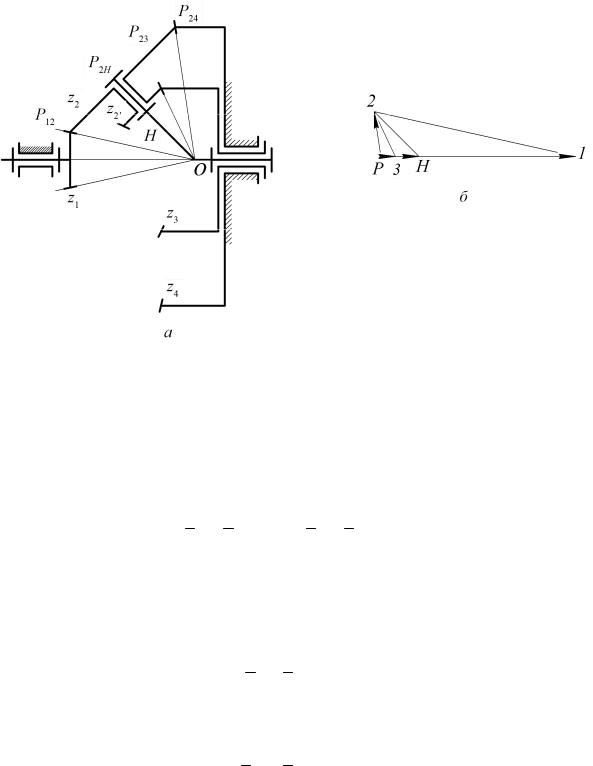
8.7. Специальные передаточные (планетарные) механизмы
Планетарным называется механизм, имеющий в своем составе хотя бы одно звено с подвижной геометрической осью в пространстве.
Звено, имеющее подвижную геометрическую ось в пространстве, на-
зывается сателлитом.
Звено, накотороеустанавливаютосьсателлитов, называетсяводилом(Н). Зубчатые колеса, имеющие неподвижную геометрическую ось в прос-
транстве, называются центральными.
Центральное колесо, имеющее внешние зубья, называется солнечным. Центральное колесо, имеющее внутренние зубья, называется корон-
ной шестерней (опорным колесом). Достоинства планетарных передач:
1.Малые габариты и вес, обусловленные тем, что поток мощности, подводимый к центральному колесу, распределяется по k сателлитам (k – количество сателлитов). Затем поток мощности собирается на выходном звене. На одной планетарной передаче можно поставить до 24 сателлитов.
2.Очень высокий КПД, в среднем 0,99.
Недостаток планетарных передач – необходимость специального механизма (если число сателлитов не равно 3), который бы выравнивал нагрузку между сателлитами. Этот механизм утяжеляет и удорожает конструкцию.
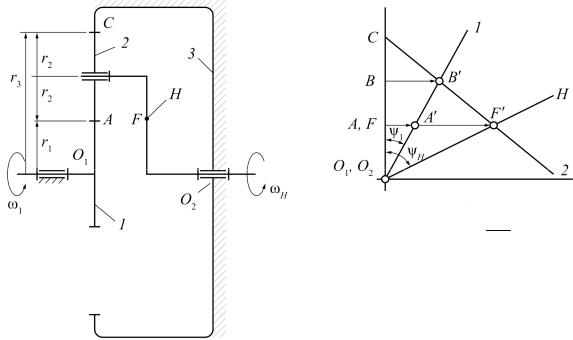
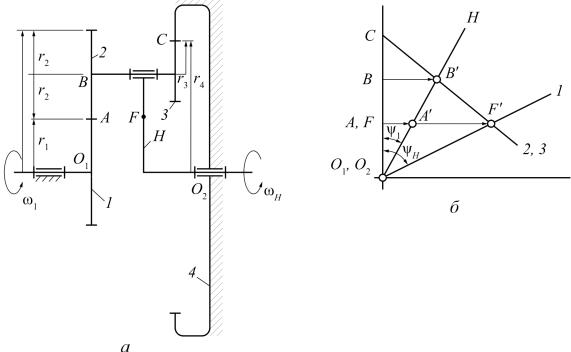
8.8.Сравнительный анализ передачи с неподвижными осями
ипланетарной передачи
Сравнительный анализ передачи с неподвижными осями и планетарной передачи представлен на рис. 8.13.
Черезчислозубьев u1−H записатьнельзя, таккакосьВ– подвижнаяось.