

2799.Теория механизмов и механика систем машин в задачах и решениях учебно
..pdfРис. 2.10. Механизм коромысла
Из построений на рис. 2.10 следует: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
ψ |
|
|
|
|
ψ |
|
|
|
|
|
|
|
Smax |
= E2b + E1b = bCtg( |
|
− β ) + bCtg( |
|
|
+ β ), |
|
||||||||||||||||
|
|
2 |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
ψ |
|
|
ψ |
|
|
|
|
l |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
tg( |
|
− β ) − tg( |
|
+ β ) = |
|
= K. |
|
|
|
|
|
|
|||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
2 |
|
|
|
|
|
|
bC |
|
|
|
|
|
|
|||||||
Произведя преобразования, получим выражение |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
Ktg2β tg2 |
ψ |
+ 2(1 + tg2β )tgψ |
|
|
− K = 0. |
|
||||||||||||||
|
|
|
|
2 |
|
||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Следовательно, сохраняя положительное значение |
ψ |
, |
|
|
|||||||||||||||||||
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||
tg |
ψ |
|
= |
−2(1 + tg2β ) + |
4(1 + tg2β )2 + 4K 2 − tg2β |
|
|
||||||||||||||||
|
|
2Ktg2β |
|
|
|
|
|
. |
(2.19) |
||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Длина bC определяется из треугольника OdC:
dO = R − bC = OCsinβ ,
откуда bC = R − OC sinβ , а
41

K = |
ln |
|
|
. |
|
R − OC sin β |
||
Для определения крайних положений коромысла используем вспомогательный механизм (рис. 2.11), который представляет собой часть СЕD основного механизма станка, к которой присоединены двухповодковые группы C0/ E0/С и С0 GC0/ .
Группа С0 GC0/ обеспечивает симметричное расположение коромыс-
ла С0С и С0/С относительно линии GC. Между точками E и E0/ звена ED
сохраняется постоянное расстояние EE0/ .
Звено ED перемещается в заданном направлении под углом β к линии центров ОС.
Рис. 2.11. Вспомогательный механизм
Перемещая звено ED в направляющих, построим траекторию точки G. Пересечение этой траектории с направлением, перпендикулярным ли-
42

нии центров ОС, определит положение точки G, при котором коромысла С0С и С0/С занимают крайние положения колебателя основного проектируемого механизма.
2.7. Проектирование механизма манипулятора
Исходными данными для проектирования механизма манипулятора (рис. 2.12) являются: угол поворота φ4 лепестка из одного крайнего положения в другое, межосевое расстояние ОС и ВС диска 3.
В заданиях предусмотрено проектирование механизма по двум схе-
мам (рис. 2.13, а, б).
Должны быть определены: угол размаха диска – φ3, длина кривошипа ОА, длина шатуна АВ, расстояние СЕ от оси диска до оси лепестка. Для механизма по схеме рис. 2.13, б необходимо определить размер CD.
Рис. 2.12. Механизм манипулятора
43

Рис. 2.13. Заменяющий механизм: а – первая схема; б – вторая схема
Определение недостающих размеров производится следующим образом: они задаются расположением точек D и Е внутри диска, причем ось Е вращения лепестка 4 в существующих затворах обычно располагается на расстоянии около 3/4 радиуса диска 3 от оси С; начальное положение пальца D лепестка должно быть взято таким, чтобы размах лепестка был симметричным относительно линии ЕС (см. рис 2.13, б).
Затем вычерчивают крайние положения лепестка, отложив угол φ4, и по ним графически находят угол размаха диска φ3.
От вертикали, проведенной через точку С, симметрично откладыва-
ют углы ϕ 3 и определяют крайние положения шарнира В на окружности
2
радиуса ВС (точки В0 и В0′ ). Через найденные точки В0 и В0′ проводят
нормаль к вертикали, которая определит направление шатуна АВ, и делают засечку на этом направлении из центра шарнира С радиусом ОС.
Радиус кривошипа и длина шатуна определяются из следующих условий:
O1В0′ = O1 A0′ + A0′B0′,
O1B0 = A0 B0 − O1 A0 . |
(2.20) |
||
|
|||
Таким образом, длина кривошипа |
|
||
O1 A0′ = |
O1B0′ − O1В0 |
. |
(2.21) |
|
|||
2 |
|
|
|
44

Задачи по синтезу рычажно-шарнирных механизмов
2.1. Для центрального криво- шипно-ползунного механизма найти минимальную длину lBC
шатуна ВС, при которой звено АВ может совершать полный оборот около своей оси А.
2.2.Для дезаксиального кри- вошипно-ползунного механизма найти минимальную длину ВС, при которой звено АВ может совершать полный оборот около своей оси А.
2.3.В механизме шарнирного четырехзвенника известны длины
всех его звеньев: lАВ = 20 мм,
lВС = 100 мм, lСD = 60 мм, lAD = = 120 мм. Указать, сможет ли звено АВ совершать полный оборот около своей оси А?
2.4. В механизме шарнирного четырехзвенника известны длины
всех его звеньев: lAB = 20 мм, lBС = = 90 мм, lСD = 40 мм, lAD
Указать, существует ли в этом механизме кривошип?
2.5. Построить два крайних положения коромысла 3 механизма шарнирного четырехзвен-
ника при lAB = 30 мм, lBC = lAD = = 80 мм, lCD = 70 мм.
45

2.6.Для кулисного механизма Витворта указать, какой размер должно иметь звено АВ, чтоб кулиса 3 не проворачивалась на полный оборот при повороте звена АВ на угол 360°?
2.7.Для кулисного механизма муфты Ольдгейма указать, на какой угол повернется кулиса 3 при повороте звена 1 на угол 360°?
2.8.В кулисном механизме Витворта размер звена АВ больше расстояния АС. Указать, на какой угол повернется кулиса 3, если звено АВ совершит полный оборот около своей оси А?
2.9.Указать, может ли существовать кривошип втангесном механизме, если размерh неравеннулю?
46

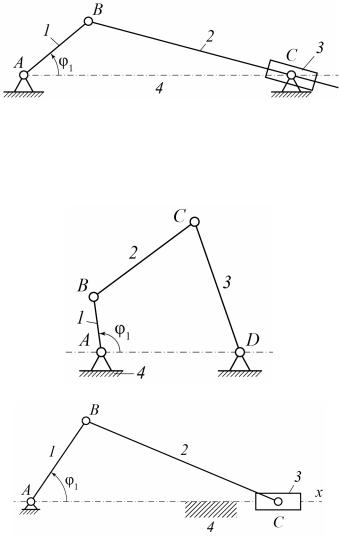
2.10. Для данного четырёхзвенного четырёхшарнирного механизма построить положения, включающие крайние, одно из них изображено на рисунке. Дано: угловая скорость кривошипа АВ постоян-
на иравна ω1 = const, lАВ = = 100 мм, lBC = lCD = 400 мм,
отрезки АВ иВС располагаются на одной прямой, а угол
BCD = 90°.
2.11. Для данного четырёхзвенного четырёхшарнирного механизма построить три положения механизма, согласно конфигурации. Дано: угловая скорость кривошипа АВ постоянна, lАB = = 100 мм, lBC = lCD = 400 мм,
ABC = BCD= 90° .
2.12.Для данного криво- шипно-ползунного механизма определить крайние положения ползуна. Дано: угловая скорость кривошипа AB по-
стоянна, lАB = 100 мм, lBC = = 200 мм,
CAB= CDB= °90 .
2.13.Для кривошипноползунного механизма построить шесть положений, включающих крайние. Дано: lAB =
= 50 мм, lBC = 150 мм, φ1 = 90°.
47

2.14. Для четырёхшарнирного четырёхзвенного механизма построить крайние положения, одно из которых принять за начальное. Дано: lAB = 70 мм, lCD = 150 мм, lAD = = lBC = 200 мм, φ1 = 15°, угло-
вая скорость кривошипа AB постоянна.
2.15. Для кривошипного механизма с качающимся ползуном построить положение согласно размерам и определить существование кривошипа. Дано: lAB = 40 мм, lAС = = 80 мм, φ1 = 30°, угловая скоростькривошипаAB постоянна.
2.16. Построить положение кривошипного механизма с качающимся ползуном при
φ1 = 90°, если lAB = 40 мм, lAC = 120 мм.
2.17. Для шестизвенного механизма найти мгновенный центр вращения скоростей звена 4 в его движении относительно стойки (звена 6). Да-
но: lAB = 40 мм, lBC = 66 мм, lBE = 33 мм, lCD = 60 мм, lAD = = 120 мм, Н = 40 мм, lEF = = 80 мм, lFG = 50 мм, φ1 = 60°.
48
2.18. Для кривошипного механизма с качающимся ползуном построить центроиду вдвижении звена 2 относительно стойки (звена 4). Дано:
lAB = 50 мм, lAC = 150 мм. По-
строение провести для значения угла φ1 поворота кривошипаAB впределахот0 доْ 30°.
2.19. Построить положение шарнирного четырехзвенника при φ1 = 30°, если
lAB = 30 мм, lBC = lAD = 80 мм, lCD = 70 мм.
2.20. Построить положение кривошипно-ползунного механизма, если φ1 = 45°, lAB = 50 мм, lBC = 150 мм.
49

3. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
Одним из основных средств снижения сроков создания новой техники является разработка систем автоматического проектирования (САПР). Теория механизмов и машин призвана обеспечить методическое и математическое содержание САПР, т.е. теорию, методы проектирования и математические модели механизмов, машин и систем машин. При этом возникает необходимость в создании надежных и устойчивых алгоритмов по всем разделам теории механизмов и машин.
3.1. Кинематика групп Ассура
При кинематическом анализе механизмов обычно выделяют три задачи: задачу о положениях, задачу о скоростях и задачу об ускорениях.
Эти задачи решаются последовательно, нельзя, например, решить сразу третью задачу, не решив предварительно две первых. Рассмотрим решение трёх задач кинематики для групп Ассура второго класса.
Вводимые обозначения. Рассмотрим рис. 3.1, на котором изображены группы 2-го класса пяти видов. Каждая группа включает в себя два звена и три кинематические пары. Одно из звеньев группы обозначим номером i, а второе – номером k. Внешние кинематические пары обозначим B и D, а внутреннюю – C. Для того чтобы группа была кинематически определима, должны быть известны положения, скорости и ускорения внешних кинематических пар в неподвижной системе координат X0Y0Z0. Например, при решении задачи о положениях должны быть известны: для внешних вращательных пар – координаты центров этих пар, для внешних поступательных пар – координаты произвольной точки на оси пары и проекции единичного вектора оси пары. При аналитическом расчете упомянутые координаты и проекции единичных векторов являются входами в группы. Поскольку каждая группа 2-го класса имеет две внешние кинематические пары и одну внутреннюю, то для каждой группы необходимо задавать два входа.
Максимальное число элементов входов зафиксировано в группе 4-го вида, так как она включает в себя две внешние поступательные пары (см. рис. 3.1). При решении задач о скоростях и ускорениях должны быть известны первые и вторые производные от входов, используемые в задаче о положениях. Обозначая буквой u первые производные, а цифрой 2 вторые, составим еще две таблицы входов. Такое обозначение производных наиболее удобно при написании программ для вычислительных машин.
50