

1329
.pdfγстS ст = lδ . Rст
Распределим обмотку ротора в воздушном зазоре:
Z 2 γстS ст = πDδ′γэ .
Из этого выражения можно определить эквивалентную электропроводность материала ротора:
γ э = |
Z2lδ |
|
= |
|
20 0,1 |
|
10 |
6 |
≈ 147 10 |
6 |
См/м. |
||
R |
π |
D |
′ |
7, 62 10−5 |
95 0, 45 |
1,329 |
|
|
|||||
|
2 |
δ |
|
|
π |
|
|
|
|
|
|
|
|
Индуктивные сопротивления обмоток статора и ротора приведены в справочнике [42] без учёта насыщения усиков пазов. При насыщении усиков паза индуктивные сопротивления статора и ротора уменьшаются в зависимости от токов статора и ротора. Для расчёта индуктивных сопротивлений с учётом насыщения в справочнике не хватает необходимой информации. Поэтому насыщение магнитопровода паза учтём приблизительно, принимая во внимание следующее.
Величина индуктивного сопротивления короткого замыкания в относительных единицах составляет
Xк = 0,055 + 0,099 = 0,154.
Та же величина при насыщении Хк.н = 0,11. Следовательно, при изменении тока статора от номинального значения до пускового индуктивное сопротивление уменьшается в 0,154/011 = 1,4 раза, т.е. насыщенное значение индуктивного сопротивления составляет Хк.н = 0,714 Xк. Кратность пускового тока для данного двигателя составляет Iп/Iн = 7,5. Будем считать, что при изменении тока двигателя от номинального до пускового индуктивные сопротивления изменяются пропорционально току. Тогда коэффициент уменьшения индуктивных сопротивлений запишется в виде
I |
|
|
K н =1 − 0,044 |
|
−1 . |
|
||
I ном |
|
|
При I = Iном коэффициент Kн = 1, при I = Iп |
Kн = 0,714. |
|
231
Таким образом, индуктивные сопротивления рассеяния обмоток двигателя рассчитываются с учётом насыщения
|
|
|
|
|
|
|
|
X A = X B = XC =1,5Kн; |
X 2′ = 2,667Kн . |
|
|
|
||||||||
Уравнение магнитного поля |
|
|
|
|
|
|
|
|||||||||||||
|
1 |
|
∂ |
2 |
|
|
|
|
∂ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
− µ |
γ ω(1 |
+ K σ2) |
A |
− |
|
0 |
γ |
(1+ K σ2 ) + q |
|
|
J |
|
||||
2 |
|
|
|
|
2 |
|
|
j |
|
A = −µ |
ст |
|||||||||
|
|
|
|
0 |
э |
|
∂ |
φ |
|
ω µ |
0 э |
|
0 |
|
||||||
|
R0 ∂ φ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
решается с граничными условиями периодического типа.
Для решения краевой задачи разобьём исследуемую область [0;2π] на N = 360 интервалов величиной
hϕ |
= |
2π |
= |
2 3,14 |
= 0, 01745 рад. |
N |
|
||||
|
|
360 |
|
||
Аппроксимируем дифференциальные операторы уравнения ко- нечно-разностными выражениями, в результате чего будем иметь
|
|
|
|
|
|
|
|
|
Ai+1 |
− 2 Ai |
+ Ai−1 |
− µ |
γ ω(1 |
+ K σ2) |
Ai+1 |
− Ai−1 |
− |
|
R02hφ2 |
2hφ |
||||||
|
0 |
э |
|
|
||||
− [ jω0µ0γ |
|
|
|
= −µ0 J ст. |
|
|
||
э(1+ K σ2) − q]Ai |
|
|
||||||
Выполняя преобразования, получим систему трёхчленных алгебраических уравнений:
|
− |
|
+ |
|
= − |
|
; |
i = 1, 2, …, |
N–1; |
|
= |
|
|||||||||
|
A0 |
|
AN ; |
||||||||||||||||||
ai Ai −1 |
|
ci Ai |
|
bi Ai+1 |
( |
|
F i |
= (∂ A ) . |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
∂ |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂ϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
∂ϕ |
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Коэффициенты уравнений этой системы: |
|
|
|
|
|
||||||||||||||||
ai =1 + µ |
γ ωR2 h (1 + K |
σ2 |
) / 2 ; |
bi |
=1 − µ |
γ ω R 2 h (1 + K |
|
σ2 |
) / 2 ; |
||||||||||||
|
0 |
э |
0 |
ϕ |
|
|
|
|
|
|
|
0 |
э |
0 |
ϕ |
|
|
||||
ci = ai + bi + jω0µ0γэ(1 + Kσ2 )R02hϕ2 + qR02hϕ2 ;
232
ω= ω0 (1− s) ; |
F i = µ0 J ст i R02hϕ2 ; |
J ст i |
= |
I iW i |
. |
|
R0hϕ δ ′ |
||||||
p |
|
|
|
|
Система трёхчленных алгебраических уравнений с учётом граничных условий решается методом циклической прогонки.
Решение дифференциального уравнения позволяет рассчитать значения векторного потенциала во всех точках исследуемой области.
Исходя из полученных значений векторного потенциала и схемы обмотки статора, рассчитываются величины потокосцеплений фаз и ЭДС фазных обмоток:
|
|
|
|
q |
|
|
|
|
Ψ ф = W кl δ ∑( Aн − Aк) , |
|
|
|
|
1 |
где |
|
Ψ ф – |
потокосцепление фазы; W к – число витков в катушке; |
|
|
и |
|
– |
значения векторного потенциала в точках расположения |
Aн |
|
Aк |
|
|
проводников данной катушки; q – число катушек в обмотке рассматриваемой фазы.
Для решения дифференциального уравнения необходимо задать фазные токи, которые определяются из уравнений Кирхгофа, записываемых для статорных обмоток двигателя (8.47)–(8.49).
Поскольку обмотка статора соединена по схеме «звезда» без нейтрального провода, то при асимметрии фаз фазные напряжения не определены. В данном случае система уравнений Кирхгофа должна быть дополнена соотношениями, позволяющими выразить фазные напряжения через линейные (8.56), (8.57). Совместное решение системы трёхчленных алгебраических уравнений, уравнений Кирхгофа и соотношений (8.56), (8.57) позволяет рассчитать значения векторного потенциала, потокосцеплений фаз и фазных токов при заданной системе линейных напряжений.
Рассчитав значения векторного потенциала, можно определить величины магнитной индукции в зазоре двигателя, плотности тока вторичной среды, электромагнитного усилия, действующего на него
233
со стороны магнитного поля, электромагнитный момент и другие параметры двигателя.
Программа расчёта рабочих характеристик асинхронного короткозамкнутого двигателя:
n=360; me=0.+1.0i; s=0.; ds=0.01; sk=1.05; om=100.*pi; pr=147.7e6; nn=1; hx=2.*pi/n; dli=0.1;
mu0=4.*pi*1.e-7; r0=47.5e-3; del=0.598e-3; tokn=7.89; uab=537.4; uca= -268.7+465.4i;
za=1.46+1.5i; zb=za; zc=za; q1=395,7.; x2s=2.667; xm=94.5; s3=q1*r0*r0*hx*hx; mm=1;
while s<sk
v=om*(1.-s); sig2=(xm+x2s)/xm;
s1=pr*v*mu0*r0*r0*hx*sig2/2.; s2=pr*om*mu0*r0*r0*hx*hx*sig2; cs=me*s2; a(1:n)=1.+s1; b(1:n)=1.-s1; c(1:n)=a(1:n)+b(1:n)+cs+s3; ia=1.; ib=0.; ic=0.; m=1;
while m<5 f(1:n)=0.;
if mm==1
w=2.5333333; dd=mu0*r0*w*hx/del; d2=dli*w; fa=dd*ia; fb=dd*ib; fc=dd*ic; for j=1:60
f(j)=fa; f(j+60)=-fc; f(j+120)=fb; end
for j=1:180 f(j+180)=-f(j);
end end if mm==2
w=1.26666665; dd=mu0*r0*w*hx/del; d2=dli*w; fa=dd*ia; fb=dd*ib; fc=dd*ic; f1(1:60)=fa; f1(61:120)=-fc; f1(121:180)=fb; f1(181:240)=-fa; f1(241:300)=fc; f1(301:360)=-fb;
f2(1:30)=fa; f2(31:90)=-fc; f2(91:150)=fb; f2(151:210)=-fa; f2(211:270)=fc; f2(271:330)=-fb;
f2(331:360)=fa; for j=1:n
f(j)=f1(j)+f2(j); end end
alf(2)=b(1)/c(1); bet(2)=f(1)/c(1); gam(2)=a(1)/c(1); for j=2:n
r=c(j)-alf(j)*a(j); alf(j+1)=b(j)/r; bet(j+1)=(a(j)*bet(j)+f(j))/r; gam(j+1)=a(j)*gam(j)/r; end
p(n-1)=bet(n); q(n-1)=alf(n)+gam(n);
234
for j=n-2:-1:1
p(j)=alf(j+1)*p(j+1)+bet(j+1); q(j)=alf(j+1)*q(j+1)+gam(j+1); end
r1=bet(n+1)+alf(n+1)*p(1); r2=1.-alf(n+1)*q(1)-gam(n+1); y(n)=r1/r2; for j=1:n-1
y(j)=p(j)+y(n)*q(j); end
if mm==1
pota=0.; potb=0.; potc=0.; for j=1:60
pota=pota+d2*(y(j)-y(j+180)); potb=potb+d2*(y(j+120)-y(j+300)); potc=potc+d2*(y(j+240)-y(j+60));
end end if mm==2
pota1=0.; potb1=0.; potc1=0.; pota2=0; potb2=0; potc2=0; for j=1:60
pota1=pota1+d2*(y(j)-y(j+180)); potb1=potb1+d2*(y(j+120)-y(j+300)); potc1=potc1+d2*(y(j+240)-y(j+60)); potb2=potb2+d2*(y(j+90)-y(j+270)); potc2=potc2+d2*(y(j+210)-y(j+30));
end
for j=1:30
pota2=pota2+d2*(y(j)-y(j+180)); pota2=pota2+d2*(y(j+330)-y(j+150));
end
pota=pota1+pota2; potb=potb1+potb2; potc=potc1+potc2; end
if m==1
d11=pota/ia; d21= potb/ia; d31=potc/ia; ia=0.; ib=1.; ic=0.;
end
if m==2 d12=pota/ib; d22=potb/ib; d32=potc/ib; ia=0.; ib=0.; ic=1.; end
if m==3 d13=pota/ic; d23=potb/ic; d33=potc/ic; end
m=m+1; if m==4
rr=sig2*(za+zb)+2.*me*x2s; t1=me*om*(d11+d22-d21-d12)+rr; rr=sig2*zb+me*x2s; t2=me*om*(d13+d22-d12-d23)+rr; rr=-sig2*za-me*x2s; t3=me*om*(d12+d31-d11-d32)+rr; rr=sig2*zc+me*x2s; t4=me*om*(d12+d33-d13-d32)+rr;
235
delt=t1*t4-t2*t3; delt1=sig2*(uab*t4-uca*t2); delt2=sig2*(uca*t1-uab*t3); ia=delt1/delt; ic=delt2/delt; ib=-ia-ic;
end end
edsa=-me*om*pota; edsb=-me*om*potb; edsc=-me*om*potc; cua=(-edsa+ia*(sig2*za+me*x2s))/sig2; ua=abs(cua/1.4142); cub=(-edsb+ib*(sig2*zb+me*x2s))/sig2; ub=abs(cub/1.4142); cuc=(-edsc+ic*(sig2*zc+me*x2s))/sig2; uc=abs(cuc/1.4142); toka=abs(ia/1.4142); tokb=abs(ib/1.4142); tokc=abs(ic/1.4142); bl(1)=(y(2)-y(n))/(2.*hx*r0); bl(n)=(y(1)-y(n-1))/(2.*hx*r0); r5=1./(2.*hx*r0); r6=del*dli*r0*hx; fm=0.;
for j=2:n-1 bl(j)=(y(j+1)-y(j-1))*r5;
end tr(1:n)=-pr*(me*om*y(1:n)+v*r0*bl(1:n));
fem(1:n)=real(r6*tr(1:n)*conj(bl(1:n))/2.); fm=fm+fem(1:n); em=fm*r0;
pema=-edsa*conj(ia)/2.; pemb=-edsb*conj(ib)/2.; pemc=-edsc*conj(ic)/2.; pem=pema+pemb+pemc;
p1a=ua*conj(ia)/2.; p1b=ub*conj(ib)/2.; p1c=uc*conj(ic)/2.; pa2=em*v; ss=ua*toka+ub*tokb+uc*tokc; ssk=(cua*conj(ia)+cub*conj(ib)+cuc*conj(ic))/2; pa1=real(ssk); kpd=pa2/pa1; cosf=pa1/ss;
disp(s); disp(abs(ia)/1.414); disp(abs(ib)/1.414); disp(abs(ic)/1.414); sp(pa1); disp(pa2);
disp(kpd); disp(cosf); disp(em); n1(nn)=s; if toka>tokn
kn=1.-0.0476666*(toka/tokn-1.); xa=1.5*kn; za=1.46+me*xa; zb=za; zc=za; x2s=2.667*kn;
end
if mm==1
n2(nn)=toka; n3(nn)=pa1; n4(nn)=pa2; n5(nn)=real(kpd); n6(nn)=cosf; n7(nn)=em;
end
if mm==2 n8(nn)=em;
end
s=s+ds; nn=nn+1; end plot(n1,n7,n1,n8);
236
Результаты расчёта рабочих характеристик асинхронного короткозамкнутого двигателя приведены в табл. 8.1.
Таблица 8 . 1
Результаты расчёта рабочих характеристик асинхронного короткозамкнутого двигателя
s |
I, А |
P1, Вт |
P2, Вт |
КПД |
cos ϕ |
М, Н·м |
0 |
3,1799 |
51,5195 |
4,6905 |
0,0910 |
0,0246 |
0,0149 |
0,0100 |
3,8578 |
1,4380e+003 |
1,3552e+003 |
0,9425 |
0,5664 |
4,3575 |
0,0200 |
5,3868 |
2,7767e+003 |
2,5892e+003 |
0,9325 |
0,7833 |
8,4098 |
0,0300 |
7,1748 |
4,0573e+003 |
3,7038e+003 |
0,9129 |
0,8593 |
12,1543 |
0,0400 |
9,0101 |
5,2722e+003 |
4,6994e+003 |
0,8914 |
0,8892 |
15,5820 |
0,0500 |
10,8219 |
6,4215e+003 |
5,5836e+003 |
0,8695 |
0,9017 |
18,7085 |
0,0600 |
12,5828 |
7,5058e+003 |
6,3636e+003 |
0,8478 |
0,9064 |
21,5490 |
0,0700 |
14,2798 |
8,5230e+003 |
7,0444e+003 |
0,8265 |
0,9070 |
24,1109 |
0,0800 |
15,9084 |
9,4750e+003 |
7,6335e+003 |
0,8057 |
0,9050 |
26,4112 |
0,0900 |
17,4675 |
1,0364e+004 |
8,1387e+003 |
0,7853 |
0,9016 |
28,4683 |
0,1000 |
18,9579 |
1,1194e+004 |
8,5675e+003 |
0,7654 |
0,8972 |
30,3012 |
0,1500 |
25,4671 |
1,4569e+004 |
9,8067e+003 |
0,6731 |
0,8693 |
36,7245 |
0,2000 |
30,6717 |
1,6954e+004 |
1,0033e+004 |
0,5918 |
0,8400 |
39,9190 |
0,2500 |
34,8982 |
1,8672e+004 |
9,7013e+003 |
0,5196 |
0,8130 |
41,1738 |
0,2800 |
37,0694 |
1,9476e+004 |
9,3495e+003 |
0,4801 |
0,7983 |
41,3337 |
0,3000 |
38,3910 |
1,9938e+004 |
9,0747e+003 |
0,4551 |
0,7892 |
41,2654 |
0,3500 |
41,3251 |
2,0895e+004 |
8,3013e+003 |
0,3973 |
0,7683 |
40,6520 |
0,4000 |
43,8259 |
,1633e+004 |
7,4649e+003 |
0,3451 |
0,7501 |
39,6028 |
0,4500 |
45,9845 |
2,2214e+004 |
6,6133e+003 |
0,2977 |
0,7341 |
38,2744 |
0,5000 |
47,8681 |
2,2679e+004 |
5,7732e+003 |
0,2546 |
0,7199 |
36,7535 |
0,5500 |
49,5274 |
2,3057e+004 |
4,9592e+003 |
0,2151 |
0,7074 |
35,0792 |
0,6000 |
51,0009 |
2,3365e+004 |
4,1786e+003 |
0,1788 |
0,6962 |
33,2526 |
0,6500 |
52,3177 |
2,3617e+004 |
3,4344e+003 |
0,1454 |
0,6859 |
31,2347 |
0,7000 |
53,4972 |
2,3815e+004 |
2,7268e+003 |
0,1145 |
0,6765 |
28,9323 |
0,7500 |
54,5396 |
2,3946e+004 |
2,0570e+003 |
0,0859 |
0,6672 |
26,1905 |
0,8000 |
55,3579 |
2,3941e+004 |
1,4577e+003 |
0,0609 |
0,6572 |
23,1997 |
0,8500 |
55,5915 |
2,3722e+004 |
1,1713e+003 |
0,0494 |
0,6484 |
24,8550 |
0,9000 |
56,0897 |
2,3926e+004 |
941,8350 |
0,0394 |
0,6482 |
29,9795 |
0,9500 |
56,9888 |
2,4223e+004 |
454,0222 |
0,0187 |
0,6459 |
28,9040 |
1,0000 |
57,6865 |
2,4369e+004 |
–5,5610 e–012 |
–2,28 e–16 |
0,6419 |
26,5731 |
237

На рис. 8.3 представлены зависимости электромагнитного момента от скольжения, рассчитанные для асинхронного двигателя 4А100S2У3. Кривая 1 изображает эту зависимость, которая получена в результате моделирования двигателя с однослойной обмоткой. Эффект вытеснения и насыщение усиков пазов статора и ротора не учитывались. Пусковой момент двигателя при этих условиях составлял M П = = 24,48 Н·м. Провал момента в зоне скольжений, близких к единице, обусловлен влиянием высшихпространственных гармоник МДС.
Рис. 8.3. Зависимость электромагнитного момента от скольжения для АД (1 – однослойная обмотка; 2 – двухслойная обмотка; 3 – аналитический расчёт)
Кривая 2 – это указанная зависимость для двигателя с укороченной обмоткой (шаг обмотки составлял 5/6 полюсного деления), с учётом насыщения усиков пазов [5]. Эффект вытеснения ввиду незначительной высоты пазов ротора не учитывался. Пусковой момент двигателя имеет повышенное значение и составляет M П = 28,35 Н·м. Провал в кривой момента практически отсутствует, вследствие уменьшения амплитуды высших пространственных гармоник. Та же
238
зависимость, но полученная в результате аналитического расчёта с использованием Г-образной схемы замещения двигателя, изображена в виде кривой 3. Насыщение усиков пазов и эффект вытеснения при этом в расчёт не принимались. Пусковой момент двигателя M П = 18,83 Н·м. Если же учитывать уменьшение пазового рассеяния двигателя, вследствие насыщения усиков, и эффект вытеснения, то по данным аналитического расчёта пусковой момент двигателя возрастёт до M П = 30,82 Н·м.
При использовании в асинхронных двигателях однослойных обмоток амплитуды высших пространственных гармоник МДС имеют значительные величины, что приводит к провалу в механической характеристике двигателя при скольжениях s = 0,7…0,9. Поэтому механическая характеристика двигателя определяется следующими точками: номинальным вращающим моментом при скольжении s = sном; максимальным моментом при критическом скольжении s = sкр; минимальным моментом при s = 0,7…0,9 ипусковым моментом при s = 1,0.
Следует отметить также, что наличие высших пространственных гармоник приводит к появлению отрицательного момента при скольжении, равном нулю. Это обстоятельство объясняется тем, что при высоких скоростях ротора моменты высших пространственных гармоник отрицательны, так как для них этот режим является генераторным. Момент основной гармоники при этом скольжении равен нулю. Величина отрицательного суммарного момента пренебрежительно мала и в расчёт может не приниматься.
Для устранения влияния высших пространственных гармоник обмотки статора выполняются укороченными и при рациональном выборе укорочения амплитуды МДС высших гармоник существенно уменьшаются.
На рис. 8.4 представлены зависимости потребляемой и полезной мощностей, от скольжения, полученные при моделировании двигателя с однослойной обмоткой. Эти зависимости имеют традиционный характер и приведены в других литературных источниках.
Традиционный характер также имеют зависимости тока двигателя, КПД и коэффициента мощности от скольжения, представленные на рис. 8.5.
239
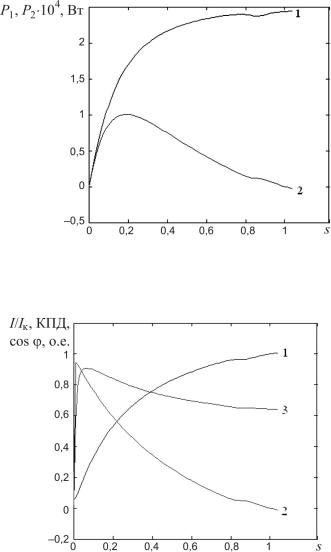
Рис. 8.4. Зависимости потребляемой и полезной мощностей от скольжения (1 – потребляемая; 2 – полезная мощность)
Рис. 8.5. Зависимости тока, КПД и коэффициента мощности двигателя от скольжения
(1 – I/Iк; 2 – КПД; 3 – cos ϕ ; Iк – пусковой ток)
240