0 = I A Z51 |
+ IB Z52 |
+ IC Z53 |
+ Ia Z54 + Ib (Z55 − Zb ) − Ic Z56 ; |
(9.34) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 = I A Z61 |
+ IB Z62 |
+ IC Z63 |
+ Ia Z64 + Ib Z65 − Ic (Z66 − Zc ) . |
(9.35) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При соединении обмоток двигателя в «звезду» фазные напряжения необходимо выразить через линейные, используя соотношения между ними (8.56) и уравнения токов (9.9). Из уравнений токов следует, что один ток статора и ротора может быть выражен через два других. Подставляя эти токи в уравнения (9.24)–(9.29), получают систему из четырёх уравнений с четырьмя неизвестными, которая решается известными методами.
Таким образом, задачу решают в следующей последовательно-
сти:
1.Задают ток фазы İА = 1 А при нулевых токах других фаз.
2.Решают уравнение (9.17) при заданных значениях токов и получают величины векторного потенциала во всех точках исследуемой области.
3.Рассчитывают величины фазных ЭДС всех фаз двигателя и ко-
эффициенты Z11 , Z21 , Z31 , Z41 , Z51 , Z61 как отношения соответствующих
ЭДС ктоку фазыА.
4. Поочерёдно задавая токи всех фаз равными 1 А при нулевых токах других фаз, решая уравнение магнитного поля, рассчитывая величины фазных ЭДС, определяют коэффициенты системы Zi , j
(9.24)–(9.29).
5.Решают систему уравнений (9.30)–(9.34) и определяют фазные токи статора и ротора.
6.Решают уравнение магнитного поля (9.17) при найденных величинах фазных токов. Полученные значения векторного потенциала дают возможность определения магнитной индукции в зазоре двигателя, значений электромагнитных усилий, действующих на проводники ротора, вращающего момента и других его параметров.
9.2. АСИНХРОННАЯ МАШИНА С ЗАТОРМОЖЕННЫМ РОТОРОМ
В ряде случаев асинхронная машина с фазным ротором может быть использована в качестве специальных устройств. Для этого ротор машины затормаживается при помощи червячной передачи, позволяющей осуществлять его поворот на произвольный угол. Обмотка ротора при этом может быть включена по различным схемам. Ктаким устройствам следует отнестифазорегуляторииндукционный регулятор.
9.2.1. Фазорегулятор
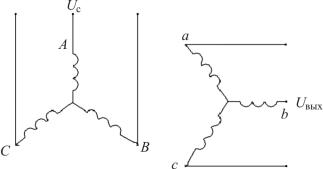
Фазорегулятор – это устройство, позволяющее изменять фазу выходного напряжения при неизменной его величине. Обмотка статора асинхронной машины включается в сеть, а с обмотки ротора снимается выходное напряжение (рис. 9.1).
Рис. 9.1. Схема обмоток фазорегулятора
При повороте ротора на произвольный угол изменяется пространственное положение осей его обмотки относительно осей обмотки статора. В результате ЭДС обмотки ротора оказывается сдвинутой по фазе относительно напряжения сети. Фазовый сдвиг выходного напряжения при нагрузке отличается на небольшую величину от угла поворота ротора вследствие падения напряжения в
обмотках статора и ротора. В отличие от трансформатора фазорегулятор позволяет получать при повороте ротора произвольную группу соединения обмоток.
Программа математической модели, реализующей режим работы фазорегулятора над нагрузкой:
n=144; del=0.90e-3; r0=92.25e-3; qq=254.0; hx=2.*pi/n; ws=4.5; wr=2.; pp=2.; ls=0.18; rs=0.362; xs=0.6486; rr=0.686; xr=0.805; mu0=4.*pi*1.e-7; nf=9; om0=pi*100.; me=0.+1.i; uab=380.; ucb=380.*(0.5+0.866i); fi0=0; nn=1; d1=me*om0*ls*ws; d2=me*om0*ls*wr; ds=mu0*ws*r0*hx/del; dr=mu0*wr*r0*hx/del;
zsa=rs+me*xs; zsb=zsa; zsc=zsa; zra=rr+me*xr; zrb=zra; zrc=zra; mm=1; if mm==1
rn=1.e6; xn=1.e6; zna=rn+me*xn; znb=zna; znc=zna; end
if mm==2
rn=10.; xn=10.; zna=rn+me*xn; znb=zna; znc=zna; end
while nf<45 m=1;
ias=1.; ibs=0.; ics=0.; iar=0.; ibr=0.; icr=0.; while m<8
f1(1:n)=0.; f2(1:n)=0.; f3(1:n)=0.; f(1:n)=0.0; f1(1:12)=ias; f1(13:24)=-ics; f1(25:36)=ibs;
for j=1:36
f1(j+36)=-f1(j); f1(j+72)=f1(j); f1(j+108)=-f1(j); end
f2(1:12)=iar; f2(13:24)=-icr; f2(25:36)=ibr;
f3(1:4)=iar; f3(5:16)=-icr; f3(17:28)=ibr; f3(29:36)=-iar; for j=1:36
f2(j+36)=-f2(j); f2(j+72)=f2(j); f2(j+108)=-f2(j); f3(j+36)=-f3(j); f3(j+72)=f3(j); f3(j+108)=-f3(j);
end
for j=1:n
j1=nf+j; if j1>n j1=j1-n; end f2(j1)=f2(j); f3(j1)=f3(j); end
a(1:n)=1.; b(1:n)=1.; c(1:n)=2.+qq*r0^2*hx^2; f(1:n)=ds*f1(1:n)+dr*(f2(1:n)+f3(1:n));
a(n+1)=a(1); b(n+1)=b(1); c(n+1)=c(1); f(n+1)=f(1); alf(2)=0.; bet(2)=0.; gam(2)=1.;
for j=2:n+1
r1=c(j)-alf(j)*a(j); alf(j+1)=b(j)/r1; r2=f(j)+a(j)*bet(j); bet(j+1)=r2/r1; gam(j+1)=gam(j)*a(j)/r1;
end
p(n)=bet(n+1); q(n)=alf(n+1)+gam(n+1); for j=n-1:-1:2
p(j)=alf(j+1)*p(j+1)+bet(j+1); q(j)=alf(j+1)*q(j+1)+gam(j+1); end
r3=bet(n+2)+alf(n+2)*p(2); r4=1.-alf(n+2)*q(2)-gam(n+2); y(1)=r3/r4; y(2:n)=p(2:n)+y(1)*q(2:n); eas=0.; ebs=0.; ecs=0.;
for j=1:12 eas=eas-d1*(y(j)-y(j+36)+y(j+72)-y(j+108));
end
for j=25:36 ebs=ebs-d1*(y(j)-y(j+36)+y(j+72)-y(j+108));
end
for j=13:24 ecs=ecs+d1*(y(j)-y(j+36)+y(j+72)-y(j+108));
end
e(1)=-d2*y(1); e(n)=-d2*y(n); e(2:n-1)=-d2*y(2:n-1); for j=1:n
j1=j+nf; if j1>n j1=j1-n; end e1(j1)=e(j); end
ear=0.; ebr=0.; ecr=0.; for j=1:12
ear=ear+e1(j)-e1(j+36)+e1(j+72)-e1(j+108); end
for j=25:36 ebr=ebr+e1(j)-e1(j+36)+e1(j+72)-e1(j+108);
end
for j=13:24 ecr=ecr-e1(j)+e1(j+36)-e1(j+72)+e1(j+108);
end
for j=1:4 ear=ear+e1(j)-e1(j+36)+e1(j+72)-e1(j+108);
end
for j=29:36 ear=ear-e1(j)+e1(j+36)-e1(j+72)+e1(j+108);
end
for j=17:28
ebr=ebr+e1(j)-e1(j+36)+e1(j+72)-e1(j+108); end
for j=5:16 ecr=ecr-e1(j)+e1(j+36)-e1(j+72)+e1(j+108);
end
if m==1
z11=eas/ias; z21=ebs/ias; z31=ecs/ias; z41=ear/ias; z51=ebr/ias; z61=ecr/ias; ias=0.; ibs=1.; ics=0.; iar=0.; ibr=0.; icr=0.;
end
if m==2
z12=eas/ibs; z22=ebs/ibs; z32=ecs/ibs; z42=ear/ibs; z52=ebr/ibs; z62=ecr/ibs; ias=0.; ibs=0.; ics=1.; iar=0.; ibr=0.; icr=0.;
end
if m==3
z13=eas/ics; z23=ebs/ics; z33=ecs/ics; z43=ear/ics; z53=ebr/ics; z63=ecr/ics; ias=0.; ibs=0.; ics=0.; iar=1.; ibr=0.; icr=0.;
end
if m==4
z14=eas/iar; z24=ebs/iar; z34=ecs/iar; z44=ear/iar; z54=ebr/iar; z64=ecr/iar; ias=0.; ibs=0.; ics=0.; iar=0.; ibr=1.; icr=0.;
end
if m==5
z15=eas/ibr; z25=ebs/ibr; z35=ecs/ibr; z45=ear/ibr; z55=ebr/ibr; z65=ecr/ibr; ias=0.; ibs=0.; ics=0.; iar=0.; ibr=0.; icr=1.;
end
if m==6
z16=eas/icr; z26=ebs/icr; z36=ecs/icr; z46=ear/icr; z56=ebr/icr; z66=ecr/icr; aa(1,1)=z21-z22-z11+z12+zsa+zsb; aa(1,2)=z23-z22-z13+z12+zsb; aa(1,3)=z24-z25-z14+z15; aa(1,4)=z26-z25-z16+z15; aa(2,1)=z21-z22-z31+z32+zsb; aa(2,2)=z23-z22-z33+z32+zsb+zsc; aa(2,3)=z24-z25-z34+z35; aa(2,4)=z26-z25-z36+z35; aa(3,1)=z51-z52-z41+z42; aa(3,2)=z53-z52-z43+z42; aa(3,3)=z54-z55-z44+z45+zra+zrb+zna+znb; aa(3,4)=z56-z55- z46+z45+zrb+znb;
aa(4,1)=z51-z52-z61+z62; aa(4,2)=z53-z52-z63+z62; aa(4,3)=z54-z55-z64+z65+zrb+znb; aa(4,4)=z56-z55- z66+z65+zrb+zrc+znb+znc;
bb=zeros(4,1);
bb(1,1)=uab; bb(2,1)=ucb; bb(3,1)=0.; bb(4,1)=0.; xx=aa\bb;
ias=xx(1,1); ics=xx(2,1); ibs=-ias-ics; iar=xx(3,1); icr=xx(4,1); ibr=-iar-icr; end
m=m+1; end
ua=-eas+ias*zsa; ub=-ebs+ibs*zsb; uc=-ecs+ics*zsc; uwa=ear-iar*zra; uwb=ebribr*zrb;
uwc=ecr-icr*zrc; fis=angle(eas)*180./pi; fir=-angle(uwa)*180/pi; dfi=fis-fir; fi0=fi0+360./72.;
if mm==1
n1(nn)=180.*nn/72.; n2(nn)=dfi; end
if mm==2 n3(nn)=dfi;
end
disp(fi0); disp(dfi); nn=nn+1; nf=nf+1; end
plot(n1,2*n1,n1,n2,n1,n3)
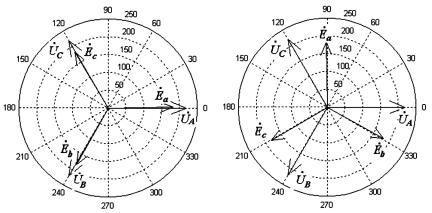
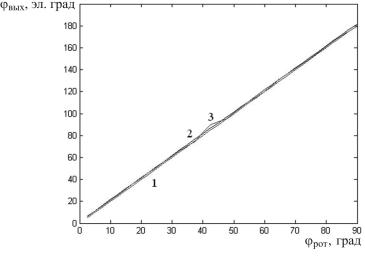
На рис. 9.2 представлены векторные диаграммы напряжения сети и ЭДС обмоток ротора для различных его угловых положений. На рис. 9.3 показаны зависимости фазового сдвига выходного напряжения фазорегулятора в режиме холостого хода и при актив- но-индуктивной нагрузке. Там же для сравнения представлен угол
Рис. 9.2. Векторные диаграммы фазорегулятора (U A , U B , U C – векторы фазных напряжений сети;
Ea , Eb , Ec – векторы выходных ЭДС)
Рис. 9.3. Зависимость фазы выходного напряжения фазорегулятора от угла поворота ротора (1 – угол поворота ротора; 2 – режим холостого хода; 3 – режим нагрузки)
поворота ротора в электрических градусах. Поскольку величина сопротивлений обмоток фазорегулятора весьма незначительна, кривые, изображённые на рисунке, практически не отличаются.
9.2.2. Индукционный регулятор
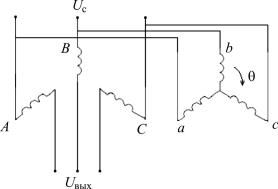
Индукционный регулятор (потенциал-регулятор) представляет собой асинхронную машину с заторможенным ротором, обмотки статора и ротора которой включены в сеть, а выходное напряжение снимается с концов статорных обмоток (рис. 9.4).
В качестве сетевой чаще используется обмотка ротора, поскольку при этом упрощается её подсоединение к сети. Под действием напряжения сети в обмотке ротора протекает ток и в воздушном зазоре создаётся вращающееся магнитное поле. Это поле наводит в обмотке статора ЭДС, которая суммируясь с напряжением сети Uc , образует
выходное напряжение Uвых.
297
Рис. 9.4. Схема индукционного регулятора
При повороте ротора на произвольный угол θ его ось сдвигается относительно оси обмотки статора на тот же угол. В результате ЭДС обмотки статора оказывается сдвинутой по фазе относительно ЭДС обмотки ротора, и соответственно напряжение сети, на угол, пропорциональный θ. Так как выходное напряжения равно сумме напряжения сети иЭДСобмоткистатора, топриэтомизменяютсяеговеличинаифаза.
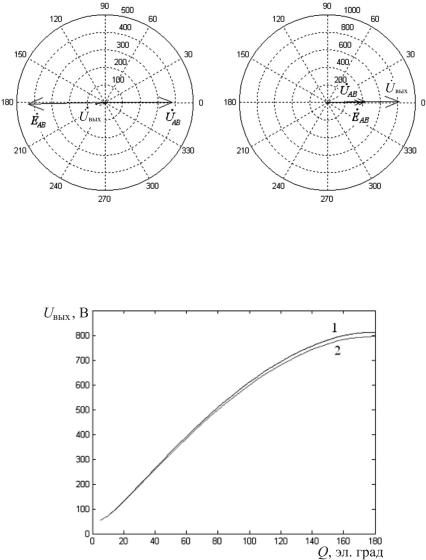
Максимальное значение выходного напряжения соответствует случаю совпадения напряжения сети и ЭДС обмотки статора по фазе, минимальное значение – случаю, когда эти величины находятся в противофазе (рис. 9.5).
Изменяя угловое положение ротора, можно регулировать величину выходного напряжения в широких пределах. В общем случае величина выходного напряжения зависит от коэффициента трансформации асинхронной машины, а также параметров её обмоток.
Программа математической модели индукционного регулятора может быть получена при незначительной коррекции программы фазорегулятора, учитывающей особенности схемы включения обмоток асинхронной машины.
На рис. 9.6 приведены зависимости выходного напряжения индукционного регулятора, полученные при моделировании режимов холостого хода и нагрузки, при использовании в качестве регулятора асинхронной машины с фазным роторам 4АК160S4У3. Линейное
298
а б
Рис. 9.5. Векторные диаграммы индукционного регулятора для двух угловых положений ротора (а – U вых = 57 В; б – U вых = 817 В)
Рис. 9.6. Зависимость выходного напряжения индукционного регулятора от углового положения ротора
299
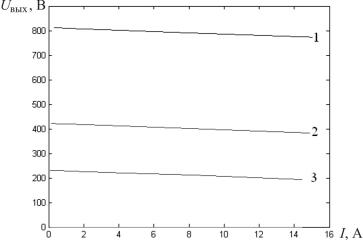
напряжение сети при расчёте принято равным 380 В. Кривая 1 на этом рисунке соответствует режиму, близкому к режиму холостого хода. Сопротивление нагрузки в этом случае принималось равным 106 Ом. Кривая 2 соответствует режиму нагрузки, близкому к номинальному, когда сопротивление нагрузки Zн = (50 + 50i) Ом.
На рис. 9.7 представлены внешние характеристики описанного индукционного регулятора при различных угловых положениях ротора. Для того чтобы величина тока при изменениях напряжения поддерживалась на одном уровне, сопротивление нагрузки снижалось пропорционально уменьшению напряжения. Внешние характеристики регулятора, представленные на рис. 9.7, обладают достаточной жёсткостью, что объясняется малой величиной сопротивлений обмоток статора и ротора. Это даёт возможность регулирования величины выходного напряжения в широких пределах.
Индукционный регулятор, выполненный по этой схеме, имеет два существенных недостатка. При протекании тока нагрузки по обмоткам асинхронной машины вследствие взаимодействия тока с её
Рис. 9.7. Внешние характеристики индукционного регулятора при различных угловых положениях ротора
(1 – ϕ = 180°; 2 – ϕ = 60°; 3 – ϕ = 30°)