Рис. 8.23. Зависимость электромагнитного момента от скольжения для асинхронного короткозамкнутого двигателя 4А315S2У3
(1 – без учёта вытеснения; 2 – с учётом вытеснения)
Точность расчётов может быть повышена, если учитывать изменение индуктивного сопротивления при насыщении мостика закрытого паза потоками рассеяния [5].
8.6. РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ
АСИНХРОННЫХ КОРОТКОЗАМКНУТЫХ
ЭЛЕКТРОДВИГАТЕЛЕЙ
Наиболее совершенным способом регулирования частоты вращения короткозамкнутых асинхронных двигателей является частотный способ. Изменение частоты питания приводит к уменьшению индуктивных сопротивлений двигателя. При постоянной величине напряжения это вызывает изменение тока двигателя и его
261
момента. Для сохранения перегрузочной способности вместе с изменением частоты пропорционально изменяют и величину напряжения с таким расчётом, чтобы их отношение оставалось постоянным. Указанный закон регулирования называют «регулированием при постоянном потоке», поскольку отношение указанных величин приблизительно пропорционально магнитному потоку. Максимальный момент двигателя при этом должен оставаться неизменным. Однако неизменность момента наблюдается лишь при частотах, близких к номинальной частоте.
Реально величина максимального момента уменьшается из-за влияния активного сопротивления обмоток. При выводе указанного закона регулирования активным сопротивлением обмотки статора пренебрегали, что справедливо, если индуктивные сопротивления значительно превышают величину активного сопротивления обмотки статора. При малых частотах величины индуктивных сопротивлений уменьшаются и становятся соизмеримыми с активным сопротивлениями статора. Это вызывает нарушение закона регулирования, и величина максимального момента снижается.
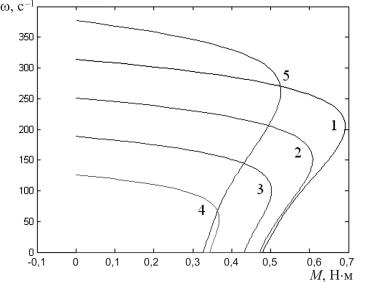
Если увеличивать частоту напряжения питания, то обороты двигателя также увеличиваются. Однако увеличивать напряжение при этом не допускается вследствие возможности пробоя изоляции. При постоянстве напряжения и увеличения частоты максимальный момент уменьшается (рис. 8.24).
Величина момента асинхронного двигателя пропорциональна квадрату напряжения. Следовательно, изменяя напряжение сети, можно изменять величину момента и, следовательно, регулировать частоту вращения. Однако такой способ регулирования для двигателей нормального исполнения используется очень редко, ввиду ограниченного диапазона регулирования (см. рис. 8.9). Для реализации этого способа регулирования изменяют конструкцию двигателя, значительно увеличивают сопротивление ротора и повышают интенсивность теплоотвода. При этом уменьшается жёсткость механических характеристик, но расширяется диапазон регулирования.
Рис. 8.24. Механические характеристики асинхронного короткозамкнутого двигателя при частотном управлении
(1 – f = fн ; 2 – f = 0,8 fн ; 3 – f = 0, 6 fн ; 4 – f = 0, 4 fн ; 5 – f = 1, 2 fн , U = Uн )
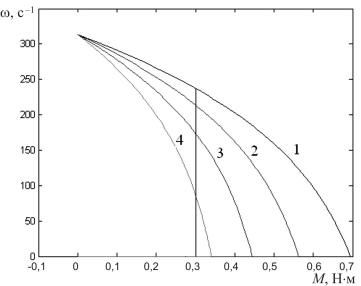
На рис. 8.25 представлены механические характеристики двигателя с повышенным сопротивлением ротора (Rр.доб = 2Rр ) и различ-
ными величинами питающего напряжения. Вертикальная линия соответствует постоянному по величине моменту нагрузки.
Широко распространённым способом регулирования частоты вращения является изменение числа полюсов двигателя. Для реализации этого способа используется несколько вариантов:
1)на статоре укладывается единственная обмотка, схема которой позволяет изменять число полюсов;
2)на статоре выполняется две обмотки, каждая из которых имеет определённое число полюсов;
3)на статоре выполняются две обмотки, каждая из которых позволяет изменять число полюсов.
263
Рис. 8.25. Механические характеристики асинхронного двигателя при регулировании частоты вращения
за счёт изменения напряжения
(1 – U = Uн ; 2 – U = 0, 9Uн ; 3 – U = 0,8Uн ; 4 – U = 0, 7Uн )
Рассмотренные варианты двигателей легко моделируются с использованием рассмотренных ранее методов. При этом основная часть программы сохраняет свою структуру, отличается лишь способ задания токовой нагрузки статора. Для реализации этой части программы необходимо иметь схему обмотки статора, соответствующую способу изменения числа полюсов. Если же на статоре укладываются две обмотки, то токовая нагрузка статора задаётся в соответствии с характером распределения проводников обеих обмоток. При расчёте рабочих характеристик двигателя необходимо учитывать, что эти обмотки должны работать раздельно.
264

8.7. НЕСТАЦИОНАРНЫЙ РЕЖИМ КОРОТКОЗАМКНУТОГО АСИНХРОННОГО ДВИГАТЕЛЯ
Нестационарные электромагнитные поля асинхронного короткозамкнутого двигателя описываются уравнением в частных производных параболического типа (8.12):
1 |
|
∂ 2A |
− µ |
0γ(1 |
+ K σ 2 )ω |
∂ A− |
µ0γ(1+ |
K σ2 )∂ |
A− qA= − µ |
0 J ст . |
|
|
R02 ∂ φ2 |
|
|
∂ φ |
|
∂ t |
|
Помимо указанного уравнения должны быть заданы условия: краевые, периодического типа и начальные, определяющие значения векторного потенциала в момент коммутации.
Для решения краевой задачи должна быть известна правая часть дифференциального уравнения – плотность стороннего тока, равномерно распределённого по высоте зазора J ст .
В отличие от стационарного режима эта величина определяется мгновенными значениями фазных токов статора, и при известной схеме обмотки статора может быть рассчитана с использованием выражения (8.46):
J ст(φ0) = ∑ iδ(φ′ 0) δ(φ− φ0 ) ,
где i(φ0) – мгновенное значение фазного тока, принадлежащего рас-
сматриваемому интервалу разбиения пространственной координаты. Поскольку величины фазных токов зависят от питающих напряжений и параметров асинхронной машины, для определения мгновенных значений фазных токов используется система уравнений Кирхгофа, которая для нестационарного режима записывается
в виде:
u A = |
d Ψ |
A |
+ L A |
diA |
+ i A R A ; |
(8.81) |
dt |
|
dt |
|
|
|
|
|
u B = |
d Ψ |
B |
|
+ L B |
diA |
|
+ i B R B ; |
(8.82) |
dt |
|
|
dt |
|
|
|
|
|
|
|
|
|
uC = |
|
d Ψ |
C |
|
+ LC |
diC |
|
+ iC RC , |
(8.83) |
|
dt |
|
|
dt |
|
|
|
|
|
|
|
|
|
где Ψ AΨ, ΨB, C – мгновенные значения потокосцеплений; |
L A, L B, LC – |
индуктивности рассеяния; R A, R B, RC – |
|
активные сопротивления ста- |
торных обмоток двигателя.
Так же как и для стационарных режимов, при соединении обмоток статора в «звезду» необходимо фазные напряжения выразить че-
рез линейные: |
|
|
u AB = u A − u B ; u BC = u B − uC ; i A + i B + iC = 0. |
(8.84) |
Потокосцепления фаз, как и при стационарном режиме, могут |
быть выражены через значения векторного потенциала: |
|
p |
q |
|
Ψ ф = l δ∑∑W к( Aн − Aк) , |
(8.85) |
1 |
1 |
|
где l δ – активная длина витка обмотки; p – число полюсов; q – число пазов на полюс и фазу; W к – число витков в катушке обмотки;
Ан и Ак – значения векторного потенциала в точках, соответствующих координатам сторон витка.
Система уравнений (8.12), (8.45), (8.81)–(8.85) является замкнутой, определённой и позволяет рассчитать мгновенные значения фазных токов и векторного потенциала в зазоре асинхронной машины при известных величинах питающих напряжений. Значения составляющих магнитной индукции рассчитываются по найденным значениям векторного потенциала с использованием приведённых ранее выражений.
При расчёте нестационарного процесса должны быть заданы начальные условия: начальные значения векторного потенциала для уравнения электромагнитного поля, начальные значения фазных то-
ков в уравнениях Кирхгофа и токов рабочего тела. Если, например, исследуется пуск асинхронного двигателя, то эти величины должны иметь нулевые значения. В этом случае временные производные потокосцеплений, пропорциональные значениям производных векторного потенциала, отличны от нуля и могут быть определены исходя из начальных значений напряжения сети. Расчёт временных производных векторного потенциала связан с решением стационарной задачи, что приводит к усложнению решения системы уравнений, описывающей переходный процесс.
Для упрощения решения рационально от Т-образной схемы замещения асинхронной машины перейти к схеме замещения асинхронной машины с полым немагнитным ротором, вынеся индуктивное сопротивление ротора в статорную цепь (см. подразд. 8.1). Указанный переход для нестационарного режима асинхронной машины может быть осуществлён следующим образом.
Электромагнитные процессы Т-образной схемы замещения асинхронной машины описываются известной системой уравнений:
для цепей статора
|
|
di |
|
di |
|
di′ |
|
|
|
u = L1 |
1 |
+ i1R1 |
+ Lm |
1 |
+ |
2 |
; |
(8.86) |
|
dt |
dt |
dt |
|
|
|
|
|
|
|
для цепей ротора
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
2 |
di′ |
+ 2 i′2 + |
|
di |
+ |
di′ |
|
|
|
|
2 |
m |
1 |
2 |
|
|
|
0 |
|
L′ |
dt |
R′ |
L |
dt |
|
dt |
. |
(8.87) |
|
|
|
|
|
|
|
|
Запишем приведённый ток ротора в следующем виде:
где σ – параметр, требующий определения.
Подставляя это выражение в уравнение роторной цепи и преоб-
разуя полученное выражение, представим его в виде |
|
|
|
|
= |
R′ |
i′′ |
+ |
|
di |
+ |
L |
|
di′′ |
+ |
L′ |
|
di′′ |
+ |
|
di′′ |
− |
|
di′′ |
|
0 |
2 |
L |
1 |
m |
|
2 |
2 |
|
2 |
L |
2 |
L |
2 |
. |
(8.89) |
σ |
|
σ dt |
σ dt |
|
|
|
2 |
m dt |
m dt |
m dt |
|
Для определения параметра σ потребуем, чтобы выполнялось соотношение
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L2′ |
1 |
|
di2′′ |
+ |
Lm |
|
di2′′ |
− Lm |
di2′′ |
= 0 , |
(8.90) |
σ |
|
|
|
|
|
|
dt σ |
|
|
dt |
|
dt |
|
откуда |
|
|
σ = |
Lm + L2′ |
, |
|
|
(8.91) |
|
|
|
|
|
|
|
|
Lm
а уравнение роторной цепи принимает следующий вид:
|
|
R′ |
d |
i1 |
|
di′′ |
|
0 = |
2 |
i2′′ + Lm |
|
+ |
2 |
. |
|
σ |
dt |
dt |
|
|
|
|
|
Подставим выражение (8.88) в уравнение статорной цепи:
|
d i1 |
|
d i1 |
|
1 di2′′ |
u = L1 |
|
+ R1i1 |
+ Lm |
|
+ |
|
|
|
. |
dt |
dt |
σ |
|
|
|
|
|
|
dt |
Преобразуя полученное выражение с учётом (8.91), запишем его в окончательном виде:
|
|
L′2 |
d i1 |
|
|
|
Lm d i1 |
|
di2′′ |
|
u = L1 |
+ |
|
|
|
+ R1i1 |
+ |
|
|
|
|
+ |
|
. |
(8.94) |
σ |
|
σ |
dt |
|
|
|
dt |
|
|
|
|
dt |
|
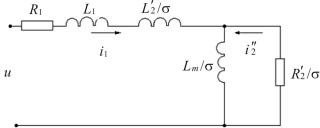
Уравнениям (8.92) и (8.94) соответствует схема замещения асинхронной машины с индуктивным сопротивлением ротора, вынесенным в статорную цепь(рис. 8.26).
Рис. 8.26. Схема замещения асинхронной машины с полым немагнитным ротором
Аналогичную схему замещения имеет асинхронная машина с полым немагнитным ротором, у которой индуктивное сопротивление ротора очень мало и им можно пренебречь.
Схема асинхронной машины с полым немагнитным ротором удобна для моделирования нестационарных процессов. При исследовании пускового режима начальные значения плотности токов статора и ротора равны нулю. Плотность тока ротора будет равна нулю лишь в том случае, если равна нулю временная производная векторного потенциала ∂ A /∂ t . Последнее условие позволяет непосредственно определять из уравнений Кирхгофа (8.81)–(8.83) производные фазных токов по известным начальным значениям напряжений и заданным параметрам асинхронной машины.
Если нестационарный режим рассчитывается при начальных условиях, отличных от нулевых, то при t = 0 должны быть заданы значения векторного потенциала и фазных токов. В этом случае, исходя из начальных значений векторного потенциала, рассчитываются начальные значения потокосцеплений фаз, а из уравнений Кирхгофа – временные производные фазных токов. Таким образом, расчет нестационарного процесса асинхронных короткозамкнутых двигателей производится в следующей последовательности:
1. С помощью начальных условий рассчитываются временные
производные фазных токов: |
diA |
, |
diB |
, |
diC |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
dt dt |
|
|
|
|
2. Рассчитываются значения фазных токов на первом временном |
интервале ∆ t: |
|
|
|
|
|
|
|
|
|
|
|
|
i A = iA0 + |
diA |
∆ t ; iB |
= iB 0 |
+ |
diB |
∆ t ; iC |
= iC 0 |
+ |
diC |
∆ t . |
|
|
|
|
dt |
|
|
|
dt |
|
|
dt |
3. С учётом схемы статорной обмотки (пространственное распределение фазных токов) и мгновенных значений токов рассчитывается плотность сторонних токов (8.47) в уравнении (8.12), которое решается при периодических граничных условиях методом циклической прогонки.

4.По найденным значениям векторного потенциала, с учётом пространственного расположения проводников обмотки статора, определяются по формуле (8.85) потокосцепления фаз.
5.С помощью уравнений Кирхгофа (8.81)–(8.83) и соотношений (8.85) рассчитываются значения временных производных фазных токов на втором временном интервале.
В дальнейшем расчёт повторяется до тех пор, пока не будет достигнуто конечное время переходного процесса.
Для расчёта электромеханического переходного процесса приведённая выше система уравнений должна быть дополнена уравнением механического движения, записываемого в виде
J |
dω |
= M − M наг . |
(8.95) |
|
|
dt |
|
где J – суммарный момент инерции двигателя и рабочего механизма; М и Мнаг – момент двигателя и момент нагрузки.
Момент двигателя
|
|
|
|
|
M = ∫ f эмR0 dV . |
(8.96) |
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
эм = |
|
P × |
|
= |
eZ J PZ× |
eR BR= − |
|
|
(8.97) |
|
f |
J |
B |
|
eφJ P BR . |
или |
|
|
|
|
|
|
|
|
|
M = l δ δ ′2∫π |
J P B R R0 dφ. |
(8.98) |
0 |
|
|
|
|
|
Интегрирование в этом выражении выполняется численными методами, а значение радиальной компоненты магнитной индукции рассчитывается через значения векторного потенциала. На каждом временном интервале интегрированием выражения (8.95) определяется частота вращения, и решение уравнения электромагнитного поля (8.12) производится при переменной частоте вращения ротора.