

Основы биомеханики
..pdfГЛАВА 3. ОСТАТОЧНЫЕ НАПРЯЖЕНИЯ И ПЕРЕСТРОЙКА
Остаточные напряжения имеются во всех органах и тканях человека (кости, сосуды, аорта, мозг, даже клетки эмбриона и т.д.). Можно ожидать, что без остаточных напряжений тело человека или животного как конструкция распалось бы на отдельные блоки (например, как конструкция из кубиков). Нарушение взаимодействия между различными органами и тканями ведет к появлению нежелательных остаточных напряжений и различным патологиям.
Остаточные напряжения имеются также в коже человека. Впервые, по-видимому, это обнаружил французский врач Дюрюитрен, (Париж, 1836). Однажды его вызвали по поводу самоубийства студента, который ударил себя круглым кинжалом. Прибыв на место происшествия, он обнаружил, что рана была не круглая, а эллиптической формы (это было следствием анизотропно распределенных остаточных напряжений в коже).
Детальное исследование распределения остаточных напряжений в коже человека провел врач из Вены Карл Лангер (1861). С тех пор линии наибольших нормальных напряжений в коже называют линиями Лангера.
3.1. ПОСТАНОВКА КРАЕВОЙ ЗАДАЧИ ОПРЕДЕЛЕНИЯ ОСТАТОЧНЫХ НАПРЯЖЕНИЙ
Рис. 3.1. Свободноетело состаточными напряжениями
По определению, остаточные напряжения в живой ткани − это самоуравновешенные напряжения, существующие в теле без действия каких-либо сил (объемных и поверхностных).
Краевая задача определения остаточных напряжений ρ в системе (живой
илинеживой) имеет вид (для сравнения
61

полезно посмотреть постановку задачи определения ростовых деформаций в подразд. 2.2)
|
ρ = 0, |
r V , или |
|
∂ρij |
|
= 0, i =1, 2,3, |
(3.1) |
|||||||||
|
∂x j |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
n ρ = 0, |
r S, |
или |
n j ρji |
= 0, i =1, 2,3, |
(3.2) |
||||||||||
|
|
|
|
|
|
|
ρ = C (ε−ε ), |
|
|
(3.3) |
||||||
|
|
|
|
|
ε = |
1 |
( u +u ), r V |
, |
(3.4) |
|||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂ρij |
= |
∂ρ |
ix + |
∂ρiy |
|
+ |
∂ρ |
iz , |
n j ρji = nxρxi + nyρyi + nz ρzi |
, |
|||||
|
|
|
|
|
|
|||||||||||
|
∂x j |
|
∂y |
|
|
|||||||||||
|
|
∂x |
|
|
|
∂z |
|
|
|
|
|
|
||||
т.е. повторяющийся индекс означает суммирование в диапазоне от 1 до 3, x1 = x, x2 = y, x3 = z.
Всоотношении (3.3) ε , вообще говоря, означает любую неупругую (или собственную) деформацию (пластическую, температурную, ростовую и др.).
Вживых тканях, по-видимому, неупругие (или собственные) деформации совпадают с ростовыми деформациями.
Далее покажем, что причиной появления остаточных напряжений в живой системе является несовместность ростовых деформаций (в более общем случае – несовместность собственных деформаций).
Напомним, что деформация называется совместной, если она может быть выражена через перемещения, т.е. может быть реализована в реальном процессе деформирования. С математической точки зрения деформация совместна, если существует такое поле перемеще-
ний точек системы u(x1 , x2 , x3 ) , что компоненты тензора деформации
можно выразить через перемещения. Другими словами, имеют место соотношения
|
|
1 |
|
∂u |
i |
|
∂u j |
|
|
|
|
|
|
|
|||||||
εij |
= |
|
|
|
+ |
|
, r V . |
|||
2 |
∂x |
|
∂x |
|||||||
|
|
|
j |
|
|
|||||
|
|
|
|
|
|
i |
|
|||
62
Полные деформации ε всегда совместны, а ростовые деформации могут быть совместными или несовместными.
Итак, мы рассматриваем свободное твердое тело, имеющее ростовые деформации.
В соответствии с ранее изложенной теорией Хсю (Hsu) ростовых деформаций полная деформация есть сумма упругой деформации и ростовой деформации.
ε |
|
= εe |
+ εg |
= C −1 |
σ |
|
|
|
. |
(3.5) |
ij |
kl |
+ εg , r V |
||||||||
|
ij |
ij |
ijkl |
|
ij |
|
||||
Здесь индекс «e» означает упругие деформации, индекс «g» −
ростовые деформации, |
Cijkl−1 − компоненты тензора податливости, |
|||||||||||||
обратного тензору Cijkl |
− компоненты коэффициентов упругости, |
|||||||||||||
ρij − остаточные напряжения. |
|
|
|
|
|
|
|
|
|
|
|
|
||
Если остаточные напряжения равны нулю, ρij |
= 0 , то εij = εijg . |
|||||||||||||
Но полные деформации, реализуемые в реальном процессе |
||||||||||||||
деформации, всегда совместны, т.е. |
|
|
|
|
|
|
|
|||||||
|
|
1 |
|
∂u |
|
|
|
∂u j |
|
|
|
|
|
|
u(r) εij = |
i |
|
|
r V . |
|
|||||||||
|
|
|
+ |
|
|
, |
(3.6) |
|||||||
2 |
∂x |
|
∂x |
|||||||||||
|
|
|
j |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
В результате получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
∂u |
|
|
∂u j |
|
|
|
|
|
|
|
ρij = 0 εijg = |
|
|
|
r V . |
|
|||||||||
|
|
|
i |
|
+ |
|
|
, |
(3.7) |
|||||
2 |
∂x |
|
|
∂x |
|
|||||||||
|
|
|
j |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
Таким образом, при отсутствии в живой системе остаточных напряжений ростовые деформации совместны, а причиной появления остаточных напряжений является несовместимость ростовых деформаций.
Еще раз заметим, что согласно (3.5) полная деформация всегда совместна, но ее составляющие ростовые деформации εijg и упругие
деформации εije могут быть и несовместными, т.е. в общем случае их нельзя выразить через перемещения по формулам Коши (3.6).
63

Примеры возникновения остаточных напряжений, вызванные несовместностью неупругих деформаций, представлены ниже.
В эксперименте используются различные механические и немеханические методы определения остаточных напряжений. Эти методы делятся на разрушающие методы и неразрушающие методы. Неразрушающие методы обычно связаны с различными электромагнитными полями (например, метод рентгеновских лучей).
Во многих случаях для экспериментального определения остаточных напряжений in vitro (т.е. на неживой ткани) применяются методы разрезания.
Идея этих методов заключается в следующем.
Пусть мы хотим экспериментально определить остаточные напряжения в сечении S тела (рис. 3.2).
Рассмотрим нижнюю часть I тела (см. рис. 3.2) после мысленного разрезания тела на две части I и II (рис. 3.3).
Сила p от части II на часть I действует в каждой точке поверхности S (под силой p понимается вектор напряжений, т.е. сила на единицу площади поверхности).
Рис. 3.2. Иллюстрация к методу |
Рис. 3.3. Нижняя часть тела |
экспериментального определения |
с остаточными напряжениями |
остаточных напряжений |
|
Далее, пусть тело действительно разрезано на части I и II. В этом случае на поверхности S после разрезания p = 0. Это эквивалентно приложению к нижней части I силы (–p) и это вызовет неко-
64
торые деформации части I. Для вычислений более предпочтительно, если эта деформация является упругой.
Из решения соответствующей краевой задачи теории упругости можно найти соотношения между силой (–p) (ее компоненты представляют нормальные pn и касательные pτ напряжения в сечении S) и перемещениями точек сечения S, которые могут быть измерены экспериментально. Таким способом из эксперимента можно определить остаточные напряжения в сечении S. Имеются различные модификации описанного метода разрезания.
Как например аналогичных экспериментов в живых тканях сошлемся на результаты, полученные всемирно известным биомехаником Ю. Фангом [1].
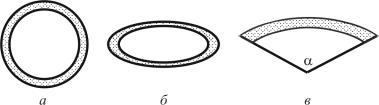
Образец легочной артерии крысы (рис. 3.4) изображен в трех состояниях: а – при кровяном давлении р = 15 мм Hg = 2 кПa; б – состояние при отсутствии кровяного давления; в – состояние после поперечных разрезаний и удаления продольной силы в кольце для получения плоского сегмента (состояние без напряжений).
Измеряя угол α, возможно рассчитать окружные остаточные напряжения.
Аналогичные результаты были получены американским ученым Дж. Воссуги, измерившим остаточные напряжения в различных фруктах (например, в яблоках).
Заметим в заключение, что вместо ростовых деформаций остаточные напряжения могут быть вызваны деформациями перестройки.
Рис. 3.4. Образец легочной артерии крысы
65
Процессы роста и перестройки связаны с развитием остаточных напряжений.
Возможно, и наоборот, остаточные напряжения являются стимулом процессов перестройки. Это может касаться как внешней, так и внутренней перестройки.
Возможным критерием роста и перестройки является развитие остаточных напряжений, приводящих при нагружении к равнонапряженной системе.
3.2. ПЕРЕСТРОЙКА КОСТИ С УЧЕТОМ ОСТАТОЧНЫХ НАПРЯЖЕНИЙ: ЭКСПЕРИМЕНТ И ТЕОРИЯ
3.2.1. Остаточные напряжения в большеберцовой и малоберцовой костях кролика (эксперимент)
Остаточные напряжения в данной структуре были определены с помощью метода разрезания [10]. Деформации, возникающие при разрезании, были определены с использованием датчиков деформации, прикрепленных к боковой поверхности вдоль оси кости с помощью акрилового клея. Температура 26 °C. Разрешение измерения составляет 1 микродеформацию = 10–6.
Системы большеберцовая кость−малоберцовая кость вырезались у 12 белых японских кроликов весом 2,5 ± 0,1 кг (среднее ± дисперсия). Система большеберцовая кость−малоберцовая кость является статически неопределенной, так как соединение костей осуществлено статически неопределенным образом (рис. 3.5). Поэтому в структуре могут существовать остаточные напряжения, даже если все внешние силы отсутствуют. Три датчика деформации А, В и С прикреплены к поверхности большеберцовой кости вдоль продольного направления. Места расположения датчиков показаны на рис. 3.5, а крестиком. Малоберцовая кость отделена в положении, отмеченном стрелкой (см. рис. 3.5, а). Наблюдаемая деформация является положительной (деформациярастяжения) на передне-внешней стороне А и задне-внешней
66

Рис. 3.5. Исследование остаточных напряжений в большеберцовой и малоберцовой костях
стороне С, но она отрицательна (деформация сжатия) на внутренней стороне В (рис. 3.5, б). Эти результаты показывают, что внутренняя сторона растянута, так что напряжение растяжения ожидается в малоберцовой кости.
3.2.2. Остаточные напряжениявкопчиковых позвонках быка
Копчиковые позвонки вырезаются из хвоста быка возрастом два года. Каждый позвонок имеет кортикальную кость во внешней части и трабекулярную кость – внутри. Два датчика деформации R и L прикреплены вокруг средней точки, они отмечены крестиками на рис. 3.6, а вдоль направления от головы к хвосту. Сначала концевые пластинки удаляются с использованием ручной пилы, при этом удаляются черепная и хвостовая пластинки роста (рис. 3.6, а).
Затем с помощью вращающейся дрели высверливается трабекулярная костная ткань внутри позвонка. Положительные (растягивающие) деформации возникают при этом в обоих датчиках R и L, установленных в местах, показанных на рис. 3.6, а. Эти деформации
67

на правом и левом датчиках примерно равны друг другу, и усредненная полная деформация равна 34 10–6. Это означает, что существуют сжимающие напряжения во внешней кортикальной кости и растягивающие напряжения во внутренней трабекулярной кости в направлении голова–хвост как самоуравновешенные напряжения.
Рис. 3.6. Остаточные напряжения в копчиковых позвонках быка: а – места датчиков и ростовые пластинки (вид сверху); б – вид с головы после удаления концевых пластинок; в – наблюдаемая деформация в направлении от головы к хвосту после удаления концевых пластинок и внутренней трабеку-
лярной кости
Копчиковый позвонок моделируется как сплошной цилиндр, заполненный в центральной части трабекулярной тканью (рис. 3.7). В организме сила Р действует вдоль оси цилиндра. Мы имеем статически неопределимую (избыточную) систему, состоящую из двух частей: 1 – трабекулярная кость, 2 – кортикальная кость.
Пусть упругие модули и площади поперечного сечения тканей равны E1 , E2 и A1 , A2 соответственно (рис. 3.8).
68

Можно заметить, что кортикальная |
|
|
кость 2 более жесткая, чем трабекулярная |
|
|
кость 1, и поэтому линии σ (ε) в кортикаль- |
|
|
ной кости проходят более круто, чем в тра- |
|
|
бекулярной кости. |
|
|
Предположим, что каждая ткань име- |
|
|
ет ростовую деформацию ε1* и ε*2 . Можно |
|
|
считать, что каждая часть позвонка как |
|
|
стержень имеет первоначально одинаковую |
|
|
длину, но после ростовой деформации дли- |
|
|
ны этих стержней различны. |
Рис. 3.7. Модель |
|
Соотношение σ−ε для каждого стерж- |
||
копчикового позвонка |
||
ня имеет вид |
|
|
σ1 = E1 (ε1 −ε1* ), |
(3.8) |
|
σ2 = E2 (ε2 −ε*2 ). |
(3.9) |
Рис. 3.8. Схема образования остаточных напряжений в позвонке: 1 – трабекулярная кость, 2 – кортикальная кость
69
Эти стержни соединяются пластинами и имеют одинаковую длину. Деформация в этом состоянии может быть названа остаточной деформацией εr . Напряжения в этом состоянии – самоуравно-
вешенные остаточные напряжения ρ1 и ρ2 . Наконец, сила Р сжимает эти стержни и создает дополнительную сжимающую деформацию, величина которой обозначена как ∆. Напряжения в этом состоянии равны σp1 и σp 2 .
Для вычисления мы должны ввести коэффициенты Ar1 и Ar 2 – коэффициенты заполнения костной ткани. Эти коэффициенты учи-
тывают существование пор в костной ткани, |
0 ≤ Ar1 ≤1. Из экспери- |
|||||
ментов на |
образцах известно, |
что |
для |
трабекулярной |
кости |
|
Ar1 ≈ 0, 28 ; для кортикальной кости Ar 2 |
≈1 . |
|
|
|||
Также из эксперимента известно, что модуль Юнга кортикаль- |
||||||
ной ткани E2 |
= 20 ГПа = 2 104 MПa . |
|
|
|
||
Тогда для трабекулярной костной ткани согласно эксперимен- |
||||||
тальному закону |
|
|
|
|
|
|
E1 = ( Ar1 )3 E2 = (0, 28)3 2 104 |
MПa = 0,044 104 MПa. |
(3.10) |
||||
Площади поперечных сечений |
|
|
|
|
||
|
A1 = 2,11 10−4 м2 , |
A2 |
=1,16 10−4 м2 . |
(3.11) |
||
Остаточные напряжения в позвонке можно найти из экспериментальных данных: деформация после удаления трабекулярной ткани ∆ε = 34 10−6 . Как видно из рис. 3.9,
|
|
∆ε = ε*2 −εr , |
(3.12) |
|
ρ2 = −∆ε E2 = −34 10−6 2 104 MПa = −0,68 MПa. |
(3.13) |
|||
Из условия равновесия можно получить |
|
|||
|
|
ρ1 A1 + ρ2 A2 = 0, |
|
|
ρ1 = −ρ2 A2 |
= |
0, 68 1,.16 |
MПa = 0,37 MПa. |
(3.14) |
|
||||
A1 |
2,11 |
|
|
|
70