

Определение ускорения свободного падения при помощи оборотного физического и математического маятников
изучение колебаний математического и физического маятников, определение с их помощью величины ускорения свободного падения.
экспериментальная установка, включающая математический и оборотный маятники, фотодатчик, миллисекундомер и счетчик колебаний.
Краткая теория
В данной работе изучаются свободные незатухающие гармонические колебания, подчиняющиеся следующему закону:
![]() , (3.1)
, (3.1)
В
этом уравнении: А
– амплитуда колебаний, т.е. наибольшее
отклонение маятника из положения
равновесия,
![]() – циклическая или круговая частота
колебаний,t
– время,
– циклическая или круговая частота
колебаний,t
– время,
![]() – начальная фаза колебания,
– начальная фаза колебания,
![]() – фаза колебания в момент времени t
с.
Периодом колебания маятника Т называют
время, в течение которого маятник
совершает одно полное колебание.
Циклическая частота и период связаны
соотношением:
– фаза колебания в момент времени t
с.
Периодом колебания маятника Т называют
время, в течение которого маятник
совершает одно полное колебание.
Циклическая частота и период связаны
соотношением:
![]() . (3.2)
. (3.2)
М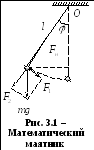 атематический
маятник
атематический
маятник
Математическим маятником называют идеальную систему, состоящую из невесомой и нерастяжимой нити, на которой подвешена масса, сосредоточенная в одной точке.
Отклонение маятника от положения равновесия можно характеризовать углом , образованным нитью с вертикалью (рис. 3.1).
При
отклонении маятника от положения
равновесия возникает вращающий момент
М,
созданный силой
![]() ,
являющейся составляющей силы тяжести
,
являющейся составляющей силы тяжести![]() .
Численное значение вращающего момента
равно:
.
Численное значение вращающего момента
равно:
![]() , (3.3)
, (3.3)
где m– масса,
l– длина маятника.
Уравнение динамики для вращательного движения имеет вид:
![]() , (3.4)
, (3.4)
где I– момент инерции маятника, равныйml2(для материальной точки),
![]() – угловое ускорение, равное второй
производной угла отклонения
– угловое ускорение, равное второй
производной угла отклонения![]() по времени
по времени
![]() . (3.5)
. (3.5)
Приравняв выражения (3.3) и (3.4), получим
![]() .
.
Приведем уравнение к виду
![]() . (3.6)
. (3.6)
В случае
малых колебаний
![]() и, если ввести обозначение
и, если ввести обозначение
![]() , (3.7)
, (3.7)
то получим дифференциальное уравнение второго порядка:
![]() . (3.8)
. (3.8)
Оно имеет решение (сравните с 3.1)
![]() . (3.9)
. (3.9)
Из формул (3.2) и (3.7) выразим период колебаний математического маятника
![]() , (3.10)
, (3.10)
где l– длина математического маятника.
Полученное соотношение (3.10) может быть использовано для определения ускорения свободного падения g. Для этого необходимо измеритьТ, иlи выразить через нихgс помощью формулы (3.10).
Физический маятник
Физическим маятником называют тело массой mпроизвольной формы и размеров, свободно колеблющееся вокруг оси, не проходящей через центр тяжести (рис. 3.2).
При
отклонении маятника на небольшой угол
он начнет
колебаться около положения равновесия
под действием составляющей![]() силы тяжести маятника
силы тяжести маятника![]() .
Составляющая силы тяжести маятника,
направленная вдоль ОС, уравновешивается
реакцией оси. Вращательный момент,
стремящийся вернуть маятник в положение
равновесия, равен:
.
Составляющая силы тяжести маятника,
направленная вдоль ОС, уравновешивается
реакцией оси. Вращательный момент,
стремящийся вернуть маятник в положение
равновесия, равен:
![]()
где m– масса,
 l– расстояние от точки подвеса до центра
тяжести.
l– расстояние от точки подвеса до центра
тяжести.

Рис. 3.2 – Физический маятник
Используя
основной закон динамики вращательного
движения (![]() )
имеем:
)
имеем:
![]() ,
,
где – угловое ускорение (см. 3.3),
I0– момент инерции маятника относительно оси качанияО.
При
малых углах отклонения маятника от
положения равновесия
![]()
Приведем уравнение (3.9) к виду
![]()
и введя обозначение
![]() , (3.11)
, (3.11)
имеем,
![]() , (3.12)
, (3.12)
или
![]() . (3.13)
. (3.13)
Частным решением дифференциального уравнения (3.13) является:
![]() , (3.14)
, (3.14)
где ![]() -
циклическая частота колебаний, равная
-
циклическая частота колебаний, равная
![]() . (3.15)
. (3.15)
Период колебания
![]() . (3.16)
. (3.16)
П олученное
соотношение (3.16) также может быть
использовано для определения ускорения
свободного паденияg.
Для этого необходимо измеритьТ,I0иlи выразить через нихgс помощью формулы (3.16). Оказывается,
однако, что с высокой точностью можно
измерить только период колебанияТмаятника, а величиныI0иlдостаточно точно
измерить не удается. Для этой цели
удобно использовать оборотный маятник,
т.е. маятник, представляющий собой
массивный стержень (1), с двух концов
которого закреплены параллельные друг
другу опорные призмы (ножи) (2), за которые
маятник может поочередно подвешиваться.
Вдоль стержня могут перемещаться и
закрепляться тяжелые грузы (3) (см. рис.
3.3).
олученное
соотношение (3.16) также может быть
использовано для определения ускорения
свободного паденияg.
Для этого необходимо измеритьТ,I0иlи выразить через нихgс помощью формулы (3.16). Оказывается,
однако, что с высокой точностью можно
измерить только период колебанияТмаятника, а величиныI0иlдостаточно точно
измерить не удается. Для этой цели
удобно использовать оборотный маятник,
т.е. маятник, представляющий собой
массивный стержень (1), с двух концов
которого закреплены параллельные друг
другу опорные призмы (ножи) (2), за которые
маятник может поочередно подвешиваться.
Вдоль стержня могут перемещаться и
закрепляться тяжелые грузы (3) (см. рис.
3.3).
Достоинством метода оборотного физического маятника для определения ускорения свободного падения является то, что I0иlне входят в расчетную формулу дляg. Перейдем к обсуждению этого метода.
Согласно теореме Штейнера, момент инерции относительно оси качания О
![]() , (3.17)
, (3.17)
где Iс– момент инерции маятника, относительно оси, параллельной оси качания и проходящей через центр массСмаятника.
Подставляя (3.17) в (3.16), получаем
![]() (3.18)
(3.18)
Попробуем найти такие два положения l1иl2(l1l2) опорных призм по разные стороны от центра масс, чтобы периоды колебаний маятника совпадали:
Т(l1) = Т(l2).
Как видно из (3.18), для этого необходимо выполнение равенства
![]() ,
,
которое имеет место либо при l1=l2, либо при
![]() . (3.19)
. (3.19)
В последнем случае период колебаний маятника
 . (3.20)
. (3.20)
Следовательно, ускорение свободного падения может быть определено по формуле:
![]() . (3.21)
. (3.21)
Как видно из (3.21), для нахождения gдостаточно измерить только две величины: расстояние (l1+l2) между опорными ребрами призм, период колебаний маятника в положенииl1и в «перевернутом» положенииl2, при которомl1l2. При этом периоды колебаний должны совпадать, т.е. должно выполняться равенство:
Т(l1)=Т(l2)=Т.
Из
формул (3.8) и (3.16) видно, что математический
маятник с длиной
![]() будет иметь такой же период, что и
физический маятник.
будет иметь такой же период, что и
физический маятник.
Величина lпрназываетсяприведенной длиной физического маятника. Значит, приведенная длина физического маятника – это длина такого математического маятника, у которого период совпадает с периодом колебаний данного физического маятника.