

3.3.2 Проектирование привода с многоскоростным электродвигателем
В курсовом проекте графоаналитический расчет в полном объеме выполняется для модернизируемого привода станка. В соответствии с выбранным направлением модернизации, если в результате ее проведения изменяется кинематика привода, то компоновочная схема привода, структурные построения и аналитические расчеты выполняются в двух вариантах: для базовой модели и модернизированного. Отличие может быть по длине кинематических цепей, в использовании и размещении редуцирующих передач, по типам электродвигателей и др.
Допустим, ранее рассмотренный пример представляет конструкцию ПГД станка базовой модели. Требуется модернизировать ПГД с целью повышения его к.п.д. Одним из путей решения поставленной задачи может быть сокращение механической части привода за счет использования многоскоростного асинхронного электродвигателя.
Исходные данные те же: φ =1,26; Z = 18, и nmax = 2000мин-1, nmin = 40 мин-1.
Число ступеней частот вращения электродвигателя считается как группа передач со знаменателем ряда:
φ =
![]() ,
,
где э- характеристика электрогруппы.
Число скоростей коробки передач должно быть кратно э, т.е.:
Z![]() =
K
э,
=
K
э,
где К-целое число.
Общее число частот вращения привода равно
Z = Zэ· Z = Zэ э K .
Отсюда следует, что общее число частот вращения должно быть кратно характеристике электродвигателя и числу скоростей электродвигателя, которых может быть 2 или 3 для соблюдения геометрического ряда.
Для рассматриваемого
примера
э
=
![]() KZэ=
KZэ=![]() возможны два варианта K=2; Zэ
= 3 или K = 3;
Zэ
= 2.
возможны два варианта K=2; Zэ
= 3 или K = 3;
Zэ
= 2.
Для двухскоростного электродвигателя и девятискоростной коробки передач структурная формула имеет вид:
Z = 2(3) ·3(1) · 3(6) =18.
Для трехскоростного электродвигателя и шестискоростной коробки передач структурная формула следующая:
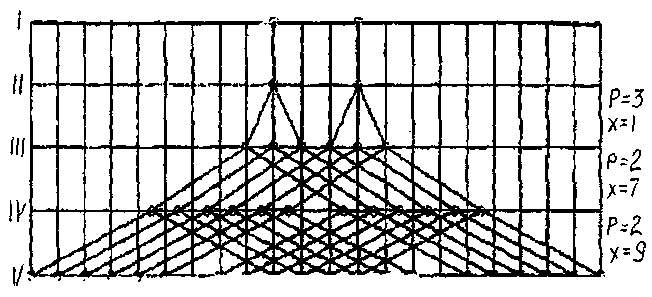
Z = 3(3) ·3(1) · 2(9) = 18.
Для знаменателя геометрического ряда φ =1,26 хmax = 9. В первом случае последняя группа передач имеет 3 ступени и характеристику 6, значит хmax = 2 · 6 = 12 - ограничение не соблюдается, следовательно, возможен только вариант с трехскоростным двигателем.
Структурная сетка привода представлена на рисунке 7.
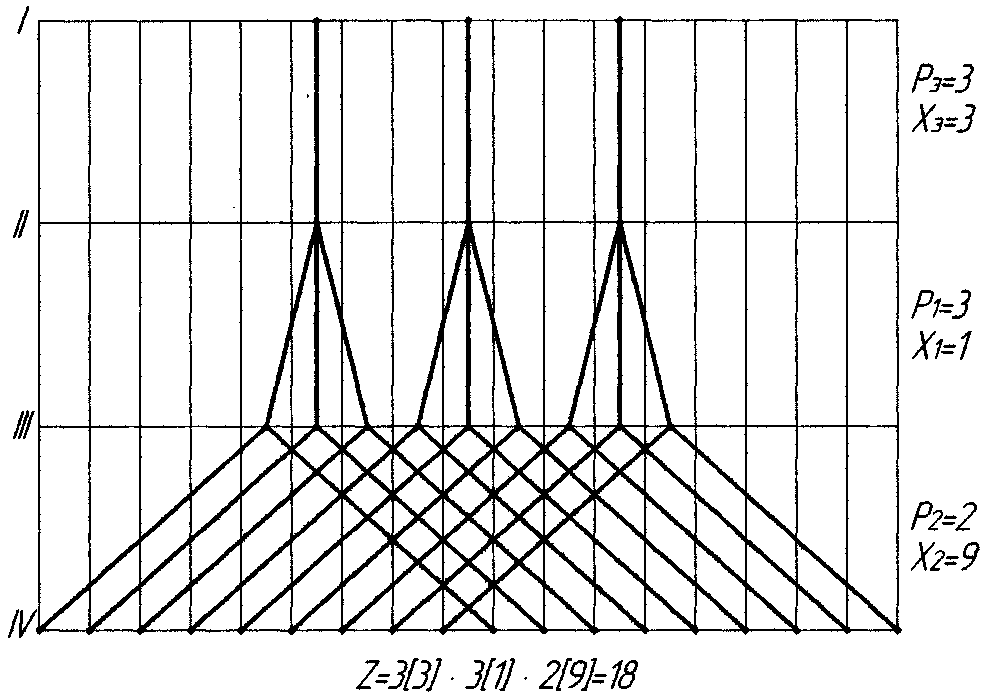
Рисунок 8 - Структурная сетка с 3-х скоростным
электродвигателем Z = 3(3) ·3(1) · 2(9)
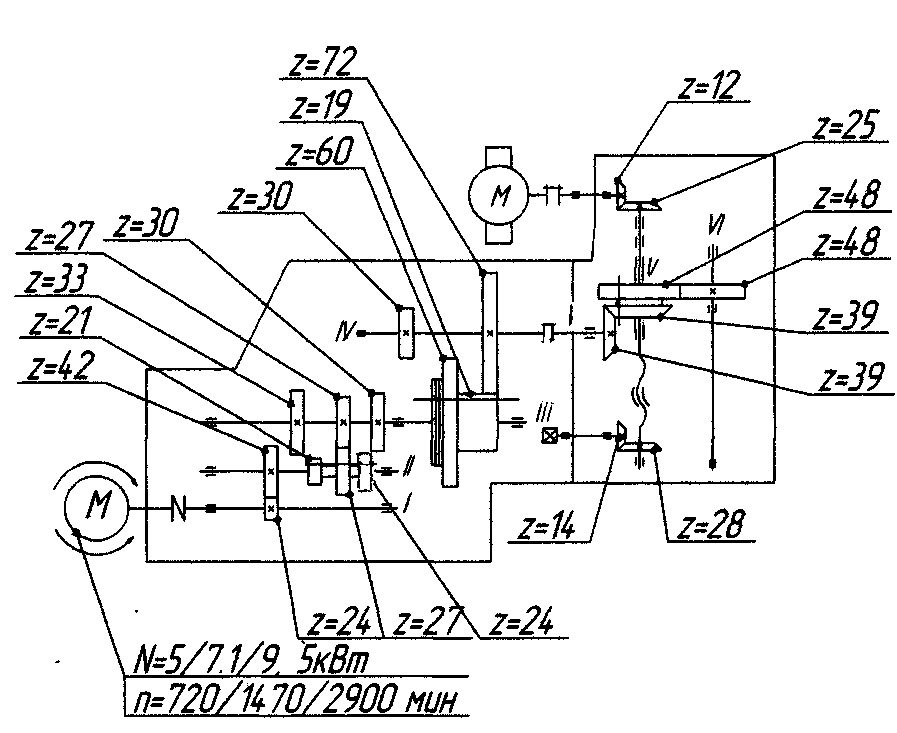
Компоновочную схему привода оставляем прежнюю и
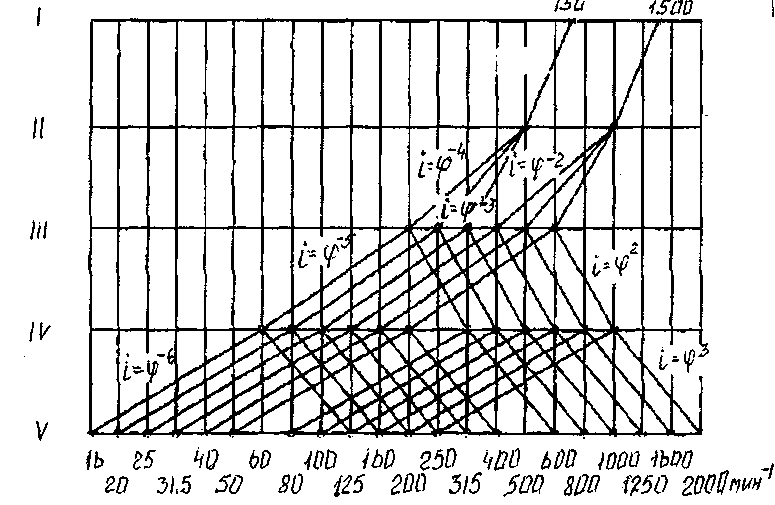
строим график частот вращения (рис. 9).
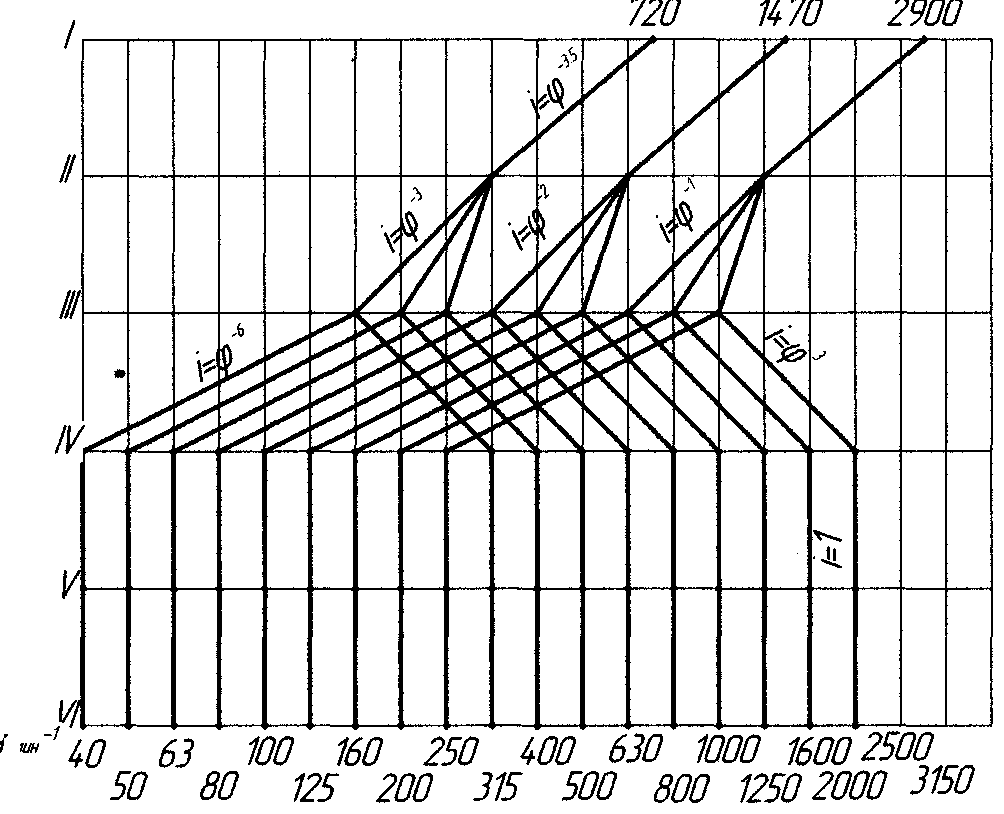
Рисунок 9 - График частот вращения привода с 3-х
скоростным электродвигателем
Дальнейший кинематический расчет по ранее изложенной методике.
скоростным электродвигателем
В результате применения 3х скоростного электродвигателя в коробке скоростей сокращено число валов и групповых зубчатых передач.
3.3.3 Проектирование привода сложенной структуры.
Корректировка структур
Структуры с последовательным включением групповых передач (множительные) имеют ограниченный диапазон регулирования скоростей. Для получения большего числа скоростей в широком диапазоне частот привод компонуется из двух и более определенным образом соединенных множительных структур, одна из которых называется основной, остальные дополнительной. Обычно эти структуры имеют короткую кинематическую цепь с большим числом редуцирующих передач на средних и низких частотах. [5].
Структурную формулу и сетку для основной структуры строят по ранее разобранной методике. Характеристика дополнительной структуры равна числу ступеней частоты вращения основной или ее части. Для каждой структуры строят отдельную структурную сетку и общий график частот вращения.
Рассмотрим пример построения привода сложенной структуры со следующими параметрами:
- источник движения асинхронный односкоростной электродвигатель nд = 1500мин-1;
число частот вращения шпинделя Z = 24;
максимальная частота вращения nmax = 3150 мин-1;
минимальная частота вращения nmin = 16 мин-1.
Диапазон регулирования
привода R
=
![]() .
.
Знаменатель ряда
частот φ =
![]() .
.
Формула привода множительной структуры:
Z = 2 · 3 · 2 · 2 = 2(1) · 3(2) · 2(6) · 2(12) = 24.
Для коробки передач
со знаменателем ряда φ = 1,26 не допускается
значение характеристики группы больше
9. В таком случае возможно применение
привода сложенной структуры Z
= Z0
· Zдоп
= 2(1) ·3(2) ·
2(6)
![]() ,
характеристика дополнительной группы
хд=6
обозначает, что она подключена в приводе
к третьему валу основной структуры.
,
характеристика дополнительной группы
хд=6
обозначает, что она подключена в приводе
к третьему валу основной структуры.
Допустим, по условию
технологии обрабатываемых деталей
достаточно иметь диапазон регулирования
частот вращения шпинделя от Zmin=
16мин-1
до Zmax
= 2000мин-1
при знаменателе ряда φ =1,26. В этом случае
R
=
![]() ,
,
соответственно
Z
= 1+![]()
Такие параметры привода можно, получить корректировкой первоначальной структуры занижая характеристику последней группы основной структуры.
В этом случае в последней группе передач создается частичное (две ступени) перекрытие частот вращения и общее число частот вращения уменьшается на
Z = х (рm-1), (25)
где Z - число совпадающих ступеней частот вращения;
- величина корректировки характеристики;
pm - число частот вращения в корректируемой группе передач.
В рассмотренном примере Z = 2(2-1) = 2.
Число скоростей скорректированного привода
Z1= Z - Z = 24-2 =22.
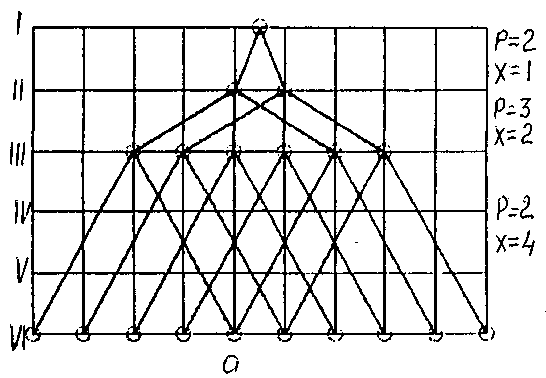
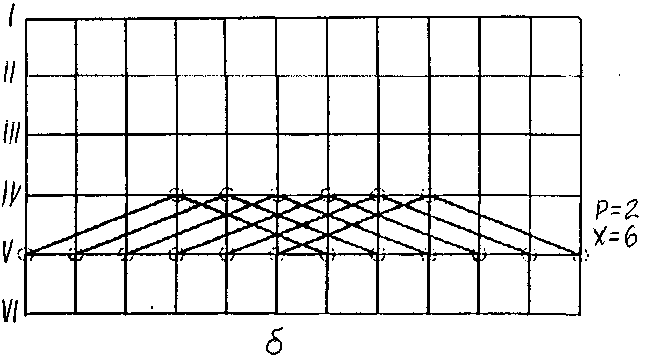
Структурная сетка привода структуры
Z
= 2(1) · 3(2) · 2(6-2)
![]() = 22 представлена на рисунке 11.
= 22 представлена на рисунке 11.
а – основная структура |
б – дополнительная структура |
Рисунок 11 - Структурная сетка привода
Z
= 2(1) · 3(2) · 2(6-2)
|
|
На рисунке 12 график частот вращения привода разработанной структуры.
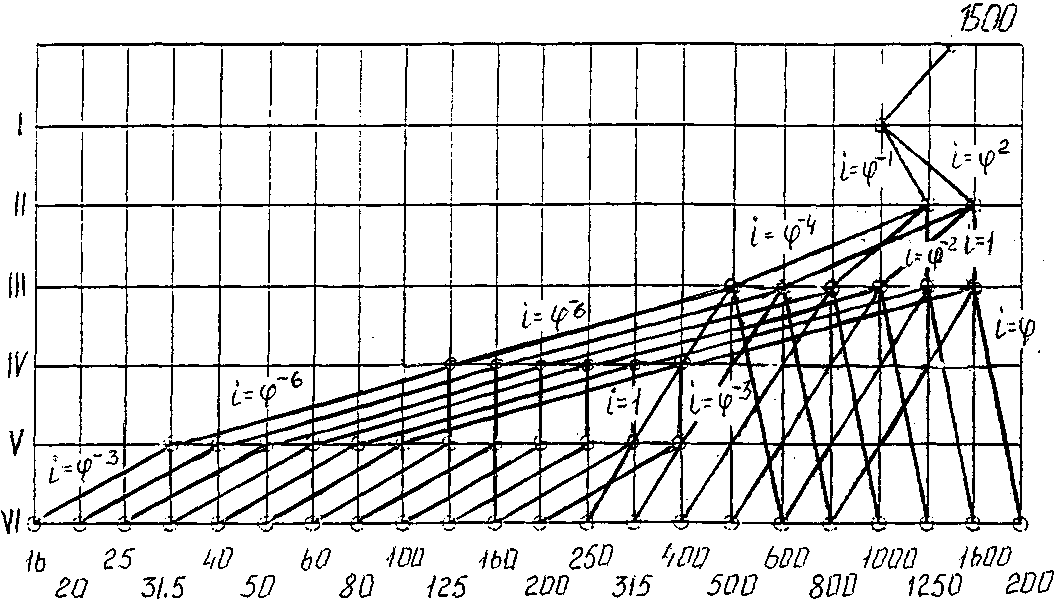
Рисунок 12 - График частот вращения привода сложенной структуры.
Корректировку структуры можно выполнять и в сторону расширения диапазона передачи, т.е. завышая характеристику группы передач. В этом случае получаем пропуск (выпадение) частот вращения, но диапазон частот увеличивается.
Допустим, поставлена задача модернизировать рассмотренный привод сложенной структуры с сокращением механических кинематических цепей. Параметры привода: nmin=16; nmax = 2000; φ = 1,26.
Одним из путей решения этой задачи может быть использование двухскоростного двигателя, а для сохранения диапазона частот вращения скорректировать характеристики групповых передач привода.
Z = 2(3) ·3(1) · 2(6+1) · 2(12-3) = 24-4 = 20.
На выходе получим 24 скорости с тремя перекрываемыми и двумя пропусками.
Z = 2(3) · 3(1) ·2(6+1) · 2(12-3)
Структурная сетка привода представлена на рисунке 13.
График частот вращения – на рисунке 14.
Z = 2(3) ·3(1) · 2(6+1) ·2(12-3)
На основе разработанного графика частот вращения выполняется кинематический расчет (см. 3.3.1).