

7.4 Расчет направляющих с циркуляцией тел качения
Нагрузочная способность роликовой опоры характеризуется допускаемой по контактной прочности длительно действующей на нее нагрузкой, значения которой при работе в паре со стальными направляющими твердостью 58 НRCэ приведены в таблице 12.
При большей скорости
узлов, особенно при наличии перекосов
опор и неравномерном нагружении роликов,
нагрузочная способность роликовой
опоры характеризуется нагрузкой,
допускаемой по контактной выносливости
поверхностных слоев. Эта нагрузка
обуславливается требуемым числом циклов
нагружений каждой точки ее рабочих
поверхностей, которое пропорционально
пути S, проходимому
рабочим органом станка. Базовая нагрузка
Р![]() ,соответствующая
базовому пути S
= 250 км, при твердости рабочих поверхностей
направляющих не ниже 60 НRCэ
приведена ниже:
,соответствующая
базовому пути S
= 250 км, при твердости рабочих поверхностей
направляющих не ниже 60 НRCэ
приведена ниже:
Типоразмер опоры |
Р ,Н |
Р88-101 |
31000 |
Р88-102 |
55000 |
Р88-103 |
110000 |
Р88У-101 |
19000 |
Р88У-102 |
38000 |
Р88У-103 |
80000 |
Р88Ш-101 |
37000 |
Р88Ш-102 |
63000 |
Р88Ш-103 |
110000 |
Допускаемую нагрузку Р для расчетного пути S определяют по зависимости
![]() ,
(98)
,
(98)
которая следует из соотношения
P10/3 S=Рδ10/3Sδ.
Если на опору действует переменная нагрузка, причем пути Si соответствует нагрузка Рi, а Р1 – наибольшая из них, то в зависимость (100) вместо Р вводят кР1. Коэффициент долговечности
![]() .
(99)
.
(99)
Сопротивление
движению опоры характеризуется силой![]() ,
требуемой для перемещения опоры, которая
нагружена нормальной силой Р:
,
требуемой для перемещения опоры, которая
нагружена нормальной силой Р:
![]() ,
(100)
,
(100)
где
![]() - начальная итоговая сила (
=5-15
Н);
- начальная итоговая сила (
=5-15
Н);
![]() - коэффициент
трения качения (
- коэффициент
трения качения (![]() =0,0004-0,0006);
=0,0004-0,0006);
d – диаметр ролик, см.
Упругая деформация опоры
![]() ,
,
где
![]() - начальная деформация;
- начальная деформация;
j – жесткость опоры.
Для опор типоразмеров Р88-101, P88-102 и Р88-103 экспериментальным путем получили соответственно =2; 3; 4 мкм;
j = 8, 5; 12; 18 Н/мкм.
Незамкнутые направляющие с роликовыми опорами применяются только для горизонтального перемещения и не могут воспринимать больших опрокидывающихся моментов. Замкнутые направляющие сложнее незамкнутых и могут быть применены для горизонтального и вертикального движений. Наиболее технологичны прямоугольные направляющие.
Чтобы исключить изгибные деформации, замкнутые направляющие монтируют так, чтобы каждая роликовая опора взаимодействовала с противостоящей опорой.
С помощью предварительного натяга повышают жесткость направляющих и не допускают отрыва подвижного узла под действием разных по направлению и значению нагрузок. При создании натяга пружинами и винтом достигаются наилучшая самоустановка опоры и минимальное сопротивление движению, но жесткость почти в 3 раза ниже по сравнению с регулировкой клиньями. При установке опор Р88 первого, второго и третьего габаритов рекомендуется натяг δн, равный 5,7 и 10 мкм на сторону. Сила предварительного натяга определяется по формуле
![]() .
(101)
.
(101)
Для смазывания направляющих жидкий смазочный материал подводится через сверления в корпус на направляющую впереди роликовой опоры. Пластичный материал наносится на опоры при сборке. Для предохранения направляющих от загрязнений применяют телескопические щитки, раздвижные меха или скребки, прикрепленные к торцу опоры.
Нагрузки на опоры определяют следующим образом. Составляют расчетную схему узла с указанием всех сил: составляющих силы резания; силы тяжести стола и установленных на нем узлов; сил, действующих со стороны тягового механизма, а также реакций опор, (см. п. 7.2). Принимают систему координат, располагая оси в плоскостях, проходящих через середины опор. Составляют уравнения равновесия подвижного узла и по ним находят нагрузки на каждую пару встречно расположенных опор. Затем распределяют каждую из нагрузок между двумя опорами. При этом учитывают, что одна опора закреплена в корпусе, а другая соединена с элементом, предназначенным для регулирования натяга. При отсутствии внешней нагрузки обе опоры нагружены одинаковыми силами, равными силе предварительного натяга РН. Внешняя сила А приводит к возрастанию нагрузки на неподвижную опору на величину А1 и к уменьшению нагрузки на подвижную – на А2, причем. (рис. 52) А1+А2=А.
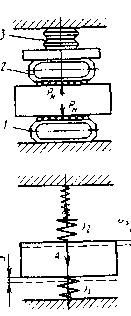
Рисунок 54 - Схема к расчету направляющих с роликовыми
опорами
Если жесткость
роликовой опоры 1 равна j1,
а жесткость опоры 2 с регулировочным
элементом 3-j2,
из условия равенства упругих перемещений
стола δ в местах контакта с обеими
опорами следует, что суммарная жесткость
системы из двух опор j
= j1 + j2
и А1 = А![]() ,
А2 = А(1 -
),
,
А2 = А(1 -
),
где = j1 / (j1 + j2), Значение є найдены экспериментальным путем = 0,95 для опор с тарельчатыми пружинами; є = 0,6 для опор с винтом, имеющим сферическую головку; є = 0,5 для опор с клиньями.
С учетом натяга нагрузка на опору 1 равна РН+А1, нагрузка на опору 2 составляет РН - А2 (должно быть РН > А2). Вычислив нагрузки на каждую опору, выбирают их типоразмер.
Если стол установлен на четырех роликовых опорах, в центре нагружен моментом М, создаваемым силой резания, с учетом податливости опоры с = 1/j и жесткости самого стола можно определить оптимальное расстояние между опорами. Угол поворота стола на опорах, установленных на расстоянии L0
![]() ,
,
где Е – модуль упругости материала стола;
I – момент инерции его поперечного сечения.
Из этого уравнения следует зависимость для вычисления оптимального расстояния между роликовыми опорами:
L0опт
=
![]() ,
(102)
,
(102)
После выполненного
расчета направляющие комплектуются
выбранными унифицированными опорами.
