

3.3.1 Графоаналитический расчет привода
с последовательным включением передач
Рассмотрим методику расчета и построения на примере привода содержащего односкоростной электродвигатель и коробку передач с числом скоростей Z = 18. Допустим, структура коробки передач состоит из трех групп: Z = 3 · 3 · 2 = 18.
В качестве основной группы определяем первую, последующие переборные в порядке записи,
тогда Z =3(1) · 3(3) · 2(9).
Проводим проверку правильности разработанной структуры коробки передач по ограничению на хmах (см. табл. 3).
Если проектируемый станок имеет значение знаменателя геометрического ряда φ = 1,06 или 1,12 или 1,26, то разработанная структуру правомерна. Если значение φ = 1,41 и выше – разработанную структуру необходимо видоизменить. Допустим, что значение φ = 1,26; следующий шаг - строим структурную сетку.
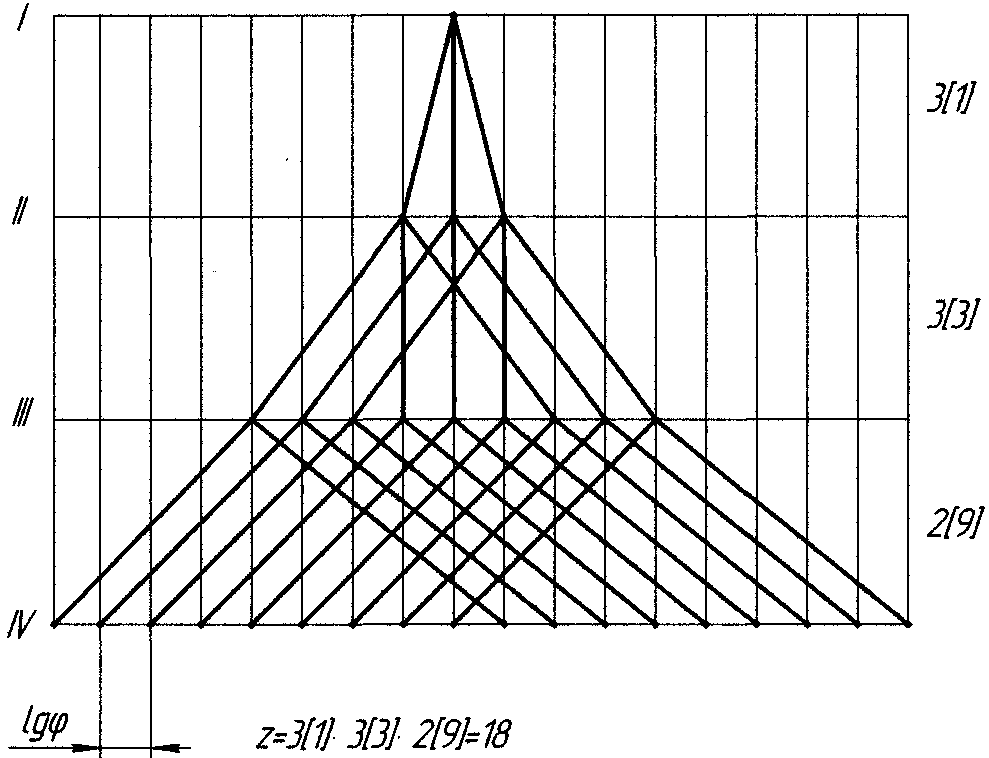
Рисунок 4 - Структурная сетка привода (Z = 18)
Разработанной структурной сетке соответствует схема размещения групповых передач (рисунок 5).
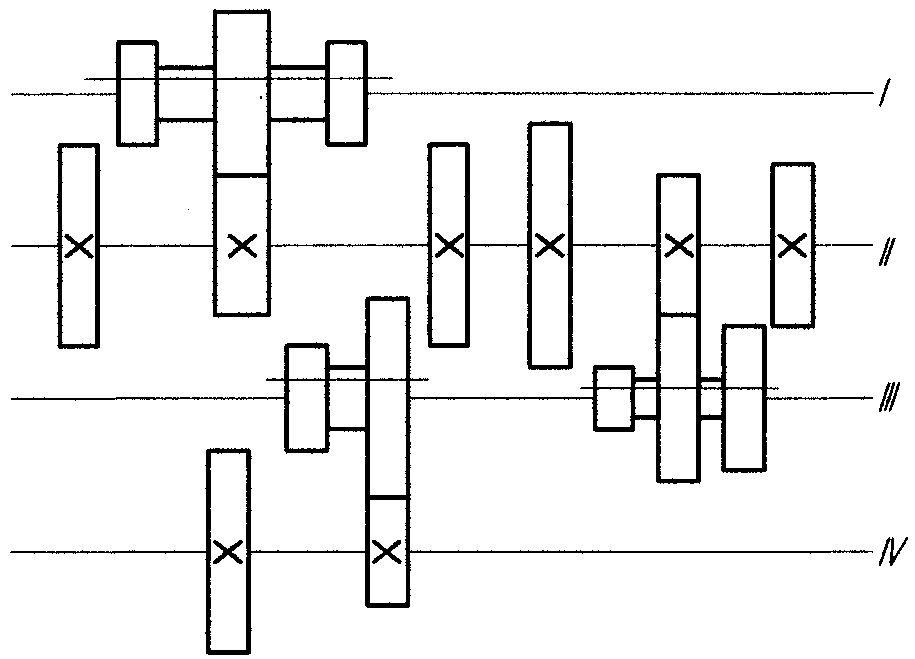
Рисунок 5 - Схема размещения групповых передач
Допустим, что графоаналитический расчет выполняется для ПГД вертикально-фрезерного станка с компоновкой привода с подвижным ползуном шпиндельной бабки.
Следующим этапом расчета ПГД является построение графика частот вращения.
Исходные данные Z =18, nmin = 40, nmax= 2000, φ = 1,26,
nд = 1460 мин-1.
График частот вращения строится в той же логарифмической координатной сетке, что и структурная сетка, только добавляются линии валов двигателя и редуцирующих передач, и является основанием для аналитического расчета передач используемых в приводе. Промежуточные значения частот вращения шпинделя определяются по таблице предпочтительных чисел [4]. При построении графика частот вращения структурная сетка может быть деформирована при условии сохранения основной закономерности расположения групп и их характеристики. Наклон луча в графике частот вращения определяет величину передаточного отношения ведущего и ведомого колес:
![]() =
φ
=
φ![]() ,
(19)
,
(19)
где
![]() -
число интервалов координатной сетки,
пересекаемых лучом.
-
число интервалов координатной сетки,
пересекаемых лучом.
Знак перед k определяет характер передачи: (+) ускоряющая; (-) - замедляющая.
Размещение
ускоряющих и замедляющих передач
выполняется с учетом ограничений
величины передаточных отношений: для
ПГД
![]() ,
для коробок подач
,
для коробок подач
![]() .
.
Таблица 4 - Допустимые числа интервалов для коробок скоростей
передачи |
число пересекаемых интервалов при |
||||||
1,06 |
1,12 |
1,26 |
1,41 |
1,58 |
1,78 |
2 |
|
понижающие |
24 |
12 |
6 |
4 |
3 |
2 |
2 |
повышающие |
12 |
6 |
3 |
2 |
1 |
1 |
1 |
Для ПГД контролировать значение передаточных отношений в зависимости от величины φ можно по рекомендациям табл. 3. Для рассматриваемого примера график частот может иметь вид, приведенный на рис. 6.

Рисунок 6 - График частот вращения привода (Z = 18)
Достоинством разработанного графика является многократная повторяемость значения передаточных отношений, что сокращает номенклатуру зубчатых колес при изготовлении станка и, повышает технологичность конструкции.
Следующим этапом проектирования является кинематический расчет коробки передач и разработка кинематической схемы станка.
Полученные по графику частот вращения значения передаточных отношений представляют в виде простых дробей
=
![]() .
(20)
.
(20)
Каждая группа
передач размещается между двумя валами
и обычно колеса имеют одинаковый модуль,
поэтому сумма зубьев, сопрягаемых колес
групповой передачи, одинакова, обозначим
ее 2Zо.
Число зубьев ведущего колеса обозначим
Z![]() ,
ведомого Z1
.
,
ведомого Z1
.
Z
= 2Z0![]() .
(21)
.
(21)
Сумма чисел зубьев сопряженных колес
2Z0
=
Z
+Z![]() =KE
, (22)
=KE
, (22)
где К - наименьшее
кратное сумм f![]() +q
группы передач;
+q
группы передач;
Е - целое число
тогда
Z
= KE![]() и
E=
и
E=![]() ,
(23)
,
(23)
В станкостроении принято ограничение по минимальному числу зубьев колес Zmin= 17. В таком случае
Emin
=![]() (24)
(24)
при значениях
![]() и q
по минимальному передаточному отношению
группы передач. Полученное значение
Emin
округляют
до целого числа. Делается проверка и
уточнение значения 2Z
и q
по минимальному передаточному отношению
группы передач. Полученное значение
Emin
округляют
до целого числа. Делается проверка и
уточнение значения 2Z![]() = KE
([4] П. 6.)
= KE
([4] П. 6.)
Рассмотрим пример расчета чисел зубьев колес основной группы передач проектируемого привода.
1
=
![]()
![]() 1+q1
= 4+5 = 9 = 3· 3
1+q1
= 4+5 = 9 = 3· 3
2
=![]() 2+q2
= 7+11 = 18 = 3·
3· 2
2+q2
= 7+11 = 18 = 3·
3· 2
3
=
![]() 3+q3
= 1+2 = 3.
3+q3
= 1+2 = 3.
Наименьшее краткое суммы ( +q ) K = 3 ·3 ·2 = 18.
Определяем Emin для минимального i3.
Emin
=
![]() .
.
Сумма чисел зубьев сопряженных колес
2Z0 = KE = 18 · 3 = 54.
Уточняем по принятым в станкостроении значениям сумм чисел зубьев сопрягаемых колес [4].
Сумма чисел зубьев сопряженных колес 54 возможна при модуле 5.
Для модулей 2; 2,5; 3 и 4 следует принять 2Z0 = 60.
Числа зубьев сопряженных колес расчетной группы передач определяются по следующим зависимостям (при модуле 5).
Z1
= 2Z0![]()
![]() ;
;
![]()
Z2
= 54![]() ;
;
![]()
Z3
= 54![]() ;
;
![]() .
.
Остальные группы передач рассчитывают аналогично. Числа зубьев редуцирующих передач с передаточным отношением равным 1 принимают из конструктивных соображений, руководствуясь нормализованными значениями сумм чисел зубьев и межосевых расстояний. (Для косозубых колес рекомендации в [4] П. 7). После расчета чисел зубьев строится кинематическая схема привода (рис. 7).
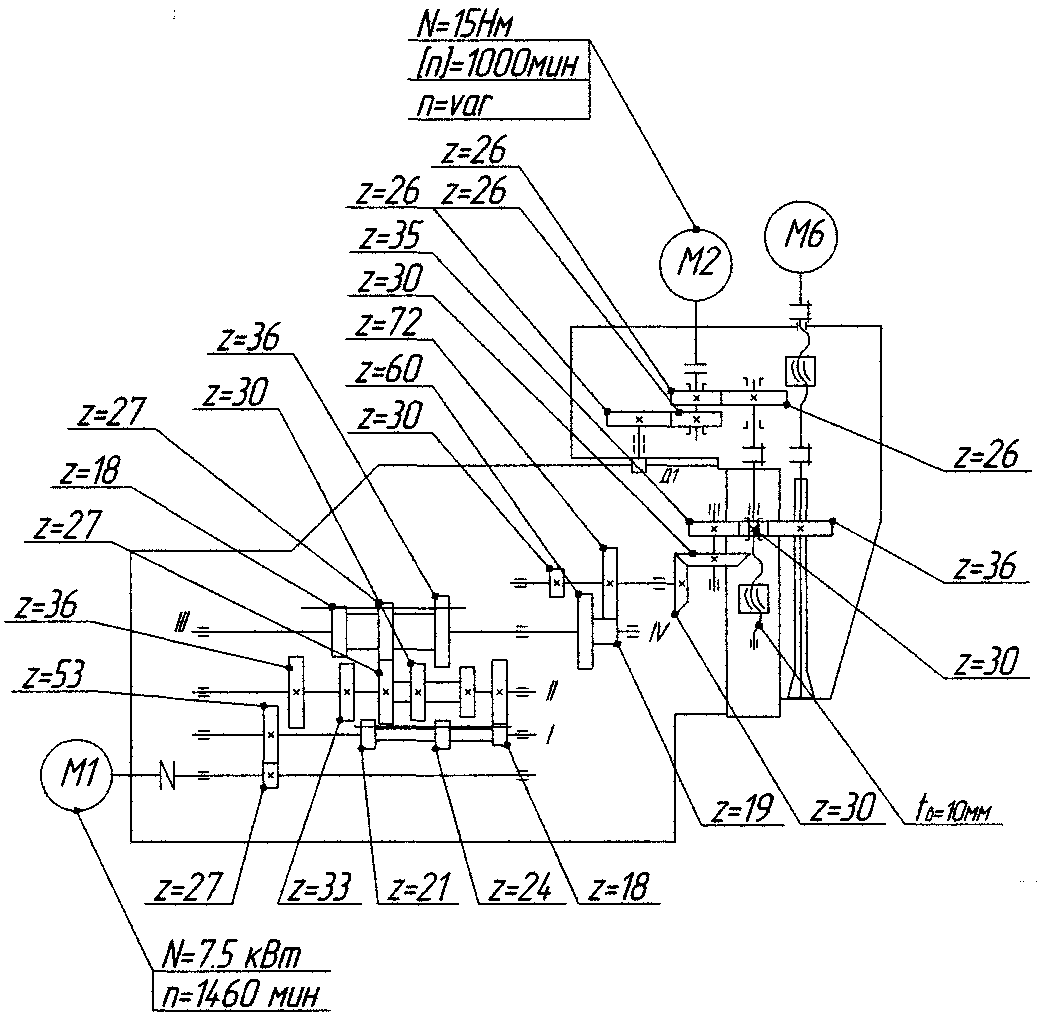
Рисунок 7 - Кинематическая схема привода (Z = 18)