

Основные понятия
1.1. Структура сау
Автоматика – отрасль науки и техники, охватывающая теорию и принципы построения систем управления техническими процессами.
Технический процесс – это устройство или реализованный технологический процесс. Автоматика изучает системы управления, действующие без непосредственного участия человека.
Принята следующая классификация параметров технического процесса.: входные воздействия, внешние воздействия, внутренние параметры и выходные параметры (координаты выходного сигнала или управляемые величины).
В системе автоматического управления (САУ) изменение управляемой величины по определенному закону без вмешательства человека выполняет управляющее устройство (УУ). САУ состоит из УУ и объекта управления (ОУ).
САУ – это такая система, которая обеспечивает комплекс операций по управлению любым техническим, в том числе производственным процессом без участия человека с помощью автоматического управляющего устройства.
Каждый процесс управления в любой момент времени характеризуется одним или несколькими показателями, которые отображают физическое состояние объекта управления (ОУ). Эти показатели в процессе управления должны изменяться по некоторому закону или же оставаться низменными при изменяющихся внешних условиях и режимах работы УУ, их называют параметрами управления процесса.
Таким образом, автоматическое управление - это совокупность воздействий, направленных на улучшение функционирования объекта управления. При этом управляющее воздействие выбирается из множества возможных воздействий на основе необходимой информации.
Обобщенная структура САУ изображена на рис. 1.1.

Рис.1.1
Схема функционирования САУ приведена на рис. 1.2.
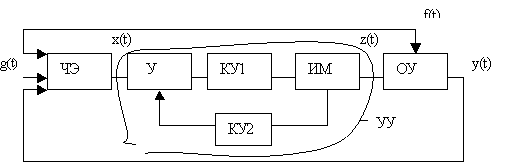
Рис. 1.2
На рис. 2 приведены следующие обозначения
y(t)– выходной сигнал
g(t)–задающее воздействие, поступает на вход УУ и содержит информацию о требуемых значениях выходных параметров y(t)
z(t)– управляющее воздействие, поступает от УУ на вход ОУ для обеспечения в нем желаемого процесса
f(t)–возмущающее воздействие (вызывает отклонение управляемого параметра y(t) от заданного значения)
x(t)– это сигнал, поступающий с выхода чувствительного элемента,
x(t)=F(g(t), y(t), f(t)) (1.1)
x(t) – характеризует ошибку САУ.
Для элементов САУ использованы обозначения ЧЭ – чувствительный элемент, У – усилитель, КУ1, КУ2 – последовательное и параллельное корректирующие устройства, ИМ – исполнительный механизм. Функционирование САУ осуществляется следующим образом.
Задающее воздействие g(t) является входным сигналом САУ и определяет требуемый закон измененения выходного сигнала. g(t) поступает на чувствительный элемент, кроме того, на ЧЭ подаются сигналы обратной связи y(t) и возмущающего воздействия f(t). ЧЭ вырабатывает сигнал ошибки x(t). Характеризующий ошибку САУ сигнал x(t) усиливается усилителем У и поступает на ИМ, который вырабатывает и подает на ОУ управляющее воздействие. Иногда, кроме сигнала x(t), учитывают его производные и интегральные характеристики.
Для обеспечения требуемых статических и динамических характеристик системы используют корректирующие устройства КУ1- последовательное и КУ2- параллельное.
Кроме того, в состав САУ могут входить специальные элементы для согласования отдельных частей системы и вычислительное устройство для реализации алгоритма работы УУ.
В САУ рассматриваются два типа ошибок, статическая и динамическая.
Статическая ошибка – это установившееся значение разности между заданным и текущим значениями y(t) при постоянных значениях задающего g(t) или возмущающего воздействия f(t).
Динамическая ошибка – это значение разности между заданным и текущим значением управляющих воздействий при произвольных y(t) и f(t). Величины ошибок зависят от структуры УУ.
Система, в которой статическая ошибка не равна нулю, называется статической. Система с нулевой статической ошибкой называется астатической (нестатической).
Параметры САУ могут быть постоянными или переменными. Если параметры САУ постоянные, или изменяются по линейному закону, САУ называется линейной.