

Нерекурсивный фильтр
Разностное уравнение для нерекурсивного фильтра первого порядка имеет вид:
![]() (4.66)
(4.66)
Z-передаточная функция, соответствующая (4.67):
![]() (4.67)
(4.67)
Схема ДЛС, соответствующая (4.68), приведена на рис. 4.17.
Рис. 4. 17
Координаты нуля находятся из уравнения:
![]() =0,
(4.68)
=0,
(4.68)
откуда
![]() .
(4.69)
.
(4.69)
Нули и полюсы D(Z) связаны со спектральными свойствами ДЛС: полюсы определяют максимумы спектра (резонансные частоты), а нули связаны с минимумами амплитудного спектра (антирезонансы).

Рис. 4. 18 Рис. 4. 19
Фильтр является абсолютно устойчивым, так как полюс находится в нуле. Признаком устойчивости фильтра является расположение его полюсов внутри единичной окружности (рис. 4. 18). Отклик системы на единичный импульс, описываемый выражением:
 ,
(4.70)
,
(4.70)
изображен на рис. 4.19.
Комплексный коэффициент передачи аналогового прототипа фильтра:
![]() ,
(4.71)
,
(4.71)
Рис. 4.20
Для АЧХ фильтра из (4.71): найдем
 (4.72)
(4.72)
Рассмотрим некоторые частные случаи для АЧХ (4.72), представленные на рис. 4.20.
1.![]() .
.
Ход xарактеристики
при изменении относительной частоты
от 0 до![]() напоминает
дифференцирующую цепь.
напоминает
дифференцирующую цепь.
2.![]() .
.
Ход характеристики при тех же значениях частоты напоминает плохой интегратор.
Характерно, что фильтр имеет значение «чистого нуля» на некоторых частотах.
При высокой крутизне Spy РХ и большой инерционности ФНЧ можно считать, что система АРУ поддерживает постоянной суммарную мощность сигнала и шума на выходе усилителя.
Это свойство усилителя с АРУ используется анализе характеристик дискриминаторов радиотехнических следящих систем [1].
5. Описание систем радиоавтоматики
5.1. Системы частотной автоподстройки
Системы частотной автоподстройки применяются в возбудителях (синтезаторах частоты) радиопередатчиков для стабилизации несущей (средней) частоты, в радиоприемниках для поддержания постоянства промежуточной частоты,
используются в качестве перестраиваемых узкополосных следящих фильтров и демодуляторов сигналов с частотной модуляцией в приемниках с обратной связью по частоте.
Рассмотрим часть упрощенной функциональной схемы супергетеродинного приемника (рис. 5.1).
Для стабилизации промежуточной частоты сигнала в приемнике используется система ЧАП. Входной сигнал Uc(t) преобразуется в смесителе (СМ) на промежуточную частоту, усиливается усилителем промежуточной частоты (УПЧ) и поступает на последующие каскады приемника (детектор, усилитель низких частот).
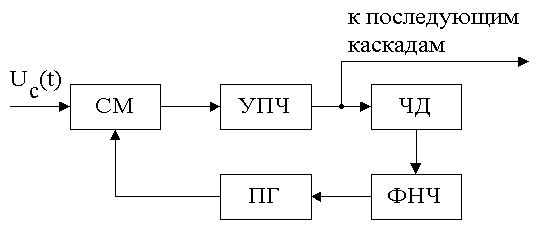
Рис. 5.1
При отсутствии системы автоподстройки нестабильность частот входного сигнала и гетеродина (ПГ) приводит к уходу промежуточной частоты сигнала за пределы полосы пропускания УПЧ и нарушению нормальной работы приемника. Система ЧАП, включаемая в состав приемника для устранения этого явления, работает следующим образом. Напряжение с выхода УПЧ подается на частотный дискриминатор (ЧД). При появлении отклонения промежуточной частоты сигнала от ее номинального значения, совпадающего с центральной частотой УПЧ, на входе ЧД возникает напряжение, зависящее от величины и знака отклонения . Выходное напряжение ЧД, пройдя через фильтр низких частот (ФНЧ), поступает на подстраиваемый генератор (ПГ) и изменяет его частоту, а следовательно, и промежуточную частоту сигнала так, что исходное рассогласование уменьшается.
Таким образом, в результате работы системы ЧАП промежуточная частота сигнала поддерживается близкой к центральной частоте УПЧ, что позволяет сузить полосу УПЧ и повысить качество приема.
Системы ЧАП применяются и в доплеровских измерителях скорости движения объектов в качестве фильтра, отслеживающего изменения частоты отраженного объектом (радиолокационного) сигнала. В этом случае параметры системы ЧАП выбираются так, чтобы колебания ПГ отслеживали медленные изменения частоты полезного сигнала и слабо реагировали на сравнительно быстрые изменения его частоты, обусловленные действием помех.
При выполнении этих требований частота колебаний ПГ изменяется в соответствии с изменением частоты полезного сигнала. В то же время колебания ПГ имеют значительно меньшую глубину шумовой частотной модуляции (ЧМ) и более узкий спектр, чем результирующее колебание на входе и могут поэтому рассматриваться как результат фильтрации системой ЧАП полезного сигнала из смеси с помехами. Полоса пропускания построенного таким способом автоматически перестраиваемого по частоте фильтра зависит от быстродействия системы ЧАП и может составлять единицы и доли герц. Дальнейшее сужение полосы пропускания ограничивается появлением ошибок в воспроизведении изменений частоты полезного сигнала.
Однако в данном случае теряется информация об амплитуде и начальной фазе сигнала. Частота колебаний ПГ при безошибочной работе системы ЧАП отличается от
частоты сигнала на постоянную величину, равную номинальному значению промежуточной частоты пр0; этот сдвиг при измерении частоты полезного сигнала не играет роли, поскольку заранее известен и может быть легко учтен при обработке результатов измерения.
Система ЧАП, изображенная на рис. 5.1, является замкнутой системой автоматического управления. Ее можно рассмотреть как систему стабилизации промежуточной частоты сигнала, в которой задающим воздействием является номинальное значение этой частоты, или как следящую систему, в которой задающим воздействием является значение частоты входного сигнала. При анализе поведения системы ЧАП последний подход оказывается более удобным.
Для анализа свойств системы ЧАП (устойчивости, быстродействия, точности слежения и др.) необходимо располагать ее математическим описанием. Для его получения нужно подробнее познакомиться с отдельными элементами системы ЧАП.
Во многих случаях скорость протекания переходных процессов в резонансных контурах СМ, УПЧ, ЧД, а также в нагрузке ЧД много выше, чем в ФНЧ. При этом СМ, УПЧ и ЧД можно считать безынерционными элементами по отношению к изменению частоты сигналов, поступающих на их входы.
Преобразование частоты описывается соотношением:
пр = с - г, (5.1)
где пр - промежуточная частота на выходе смесителя, с - частота сигнала, г - частота подстраиваемого генератора.
Отклонение промежуточной частоты от ее номинального значения пр0 составляет величину
= пр - пр0 . (5.2)
При условии безынерционности УПЧ частоты сигналов на его входе и выходе совпадают.
В качестве ЧД системы ЧАП используются дискриминаторы с расстроенными контурами, с фазовым детектированием и другие, которые применяются и для демодуляции ЧМ колебаний.
Различие терминов частотные детекторы и частотные дискриминаторы связано с их применением либо для демодуляции ЧМ колебаний, либо в составе систем ЧАП и не является принципиальным.
Выходное напряжение ЧД при действии на его входе сигнала и внутреннего шума приемника можно представить в виде суммы математического ожидания (среднего значения) и центрированной случайной составляющей
Uд(t) = M[Uд(t)] + (t, ) = F() + (t,), (5.3)
где M[Uд(t)] = F() - математическое ожидание выходного напряжения, зависящее от расстройки ; М - обозначение операции вычисления математического ожидания; (t, ) - флюктуационная составляющая напряжения Uд (t); = пр - п - расстройка промежуточной частоты пр сигнала по отношению к переходной (центральной) частоте п дискриминатора.
Зависимость F() математического ожидания выходного напряжения ЧД от расстройки называют дискриминационной характеристикой (ДХ). Типичная ДХ ЧД показана на рисунке 5.2.
Вид функции F(), а также характеристики случайного процесса t, зависят от типов и параметров УПЧ и ЧД, отношения сигнал-шум в полосе УПЧ, наличия и характера флюктуаций сигнала и от других факторов.
При малых рассогласованиях дискриминационная характеристика линейна и F() = Sд (Sд – крутизна). Переходную частоту п стремятся сделать равной пр0 для того, чтобы на выходе дискриминатора формировалось напряжение, зависящее от величины отклонения промежуточной частоты от ее номинального значения пр0.
Рис. 5.2
При этом, как следует из (5.2) и (5.4), выполняется равенство однако изменение источника напряжений, температуры, давления, влажности приводят к тому, что часто-ты пр0 и п могут различаться на некоторую величину, харак-теризующую нестабильность переходной частоты дискримина-тора. Тогда
п = пр0 + . (5.5)
Из (5.2), (5.4), (5.5) следует, что связь между расстройками и определяется равенством:
= пр - п = - , (5.6)
ФНЧ, включаемый на выходе ЧД, является, как правило, линейным устройством и описывается линейным дифференциальным уравнением, которое для однозвенного RC-фильтра имеет вид:
86
![]() ,
(5.7)
,
(5.7)
где Тф = RC - постоянная времени фильтра, Uф(t) - напряжение на выход фильтра.
Уравнение (5.7) можно записать в операторной форме (p=d/dt):
(Тф p +1) Uф(t) = Uд(t), или
![]() ,
(5.8)
,
(5.8)
где Кф(p) - операторный коэффициент передачи фильтра (ОКП).
Вид ОКП Кф(p) и параметры ФНЧ системы ЧАП зависят от ее назначения.
ФНЧ систем ЧАП радиолокационных приемников обычно содержат интеграторы.
Довольно часто используют фильтры, содержащие два интегратора. ОКП таких фильтров Кф(p)=Ru2(1+T1p)/p2. Вид ОКП ФНЧ существенно влияет на свойства системы ЧАП.
Типичным примером ПГ является транзисторный LC – автогенератор с варикапом в колебательном контуре. Перестройка частоты осуществляется за счет изменения барьерной емкости варикапа под действием напряжения смещения Uф, поступающего с выхода ФНЧ.
Зависимость частоты ПГ (рис. 2.3) от управляющего напряжения, поступающего с выхода ФНЧ системы, называют регулировочной характеристикой (РХ).
гмакс - величина максимально возможного изменения частоты генератора под действием управляющего напряжения.
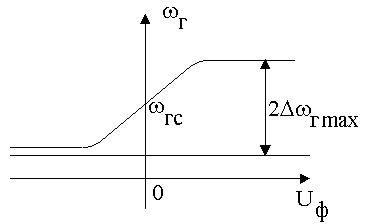
При малых величинах напряжения Uф регулировочная характеристика линейна и описывается выражением:
г = гс + Sp Uф, (5.9)
где Sp - крутизна, гс - значение собственной частоты генератора при отсутствии управляющего напряжения.
Собственная частота генератора гс с учетом ее нестабильности гс определяется выражением:
гс = г0 + гс = с0 - пр0 + гс (5.10)
где г0, с0 - номинальные значения частот ПГ (гетеродина) и сигнала.
Соотношения (5.1)-(5.10) описывают процесс управления в системе ЧАП.
Структурная схема системы автоматического управления - такая схема, в которой каждой математической операции, описывающей процесс управления, соответствует определенное звено. Структурная схема является формой представления математического описания системы и удобна для ее анализа.
Структурная схема системы ЧАП, построенная на основании (5.1)- (5.10) имеет вид, показанный на рис. 5.4.
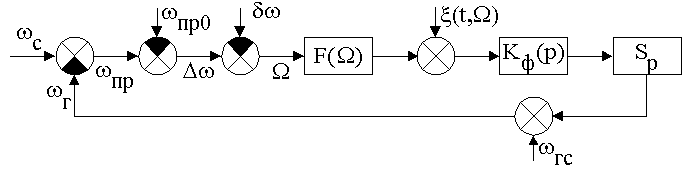
Рис. 5.4
Сумматор изображен в виде кружка, разделенного на секторы. Затененный сектор сумматора отображает операцию вычитания. Если при исследовании системы ЧАП ввести в рассмотрение отклонения с, г частот сигналов и гетеродина от их номинальных значений, c = c - c0, г = г - г0, а также положить нестабильность переходной частоты дискриминатора равной нулю гс=0, то структурная схема системы ЧАП упрощается (рис. 5.5).

Рис. 5.5