

5.4. Угломерные следящие системы
Системы автоматического слежения за направлением прихода радиосигнала используются в радиолокации, радионавигации, радиоуправления для измерения угловых координат источника сигнала. Поэтому их называют угломерными следящими системами (УCC). При использовании антенн с узкими диаграммами направленности рассматриваемые системы осуществляют также пространственную фильтрацию полезного сигнала на фоне помех.
Функциональная схема системы углового сопровождения показана на рисунке 5.18, в её состав входят: пеленгационное устройство (ПУ), ФНЧ, усилитель (У) и исполнительное устройство (ИУ).
Пеленгационное устройство, играющее роль углового дискриминатора, состоит из антенны и приемника, в котором проводится обработка принятого радиосигнала. При отклонении источника сигнала (ИС) от некоторого направления РН, называемого равносигнальным, на выходе ПУ появляется напряжение Uд(t), зависящее от величины и знака этого отклонения. Напряжение Uд(t), далее фильтруется, усиливается и воздействует на исполнительное устройство.
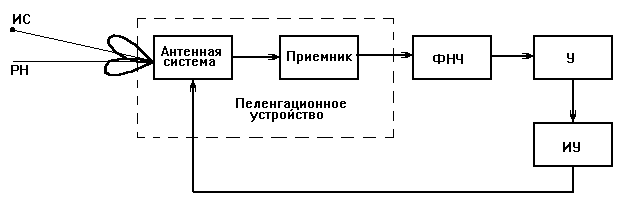
Рис. 5.18
Исполнительное устройство изменяет положение антенны или состояние ее отдельных элементов так, что РН смещается в пространстве и исходное угловое рассогласование между ним и направлением на источник сигнала уменьшается.
Угловое положение источника сигнала в пространстве обычно оценивается углами и1 и и2, отсчитываемыми в двух взаимно перпендикулярных плоскостях: горизонтальной (плоскости азимута) и вертикальной (плоскости угла места). В этих же плоскостях измеряется угловое рассогласование между РН и направлением на источник сигнала и осуществляется управление положением антенны.
Составим уравнения, описывающие работу УСС, рассматривая для простоты случай движения в одной плоскости. Обозначим угловые положения источника сигнала и равносигнального направления антенны, измеренные в некоторой опорной системе координат, соответственно через и и а. Тогда угловое рассогласование между ними, выявляемое угловым дискриминатором (пеленгатором), равно
=и-а. (5.25)
Пеленгатор, как правило, является устройством безынерционным по отношению к изменению угла . Напряжение на его выходе, содержащее детерминированную составляющую М[uд(t)]=F() и флюктуационную составляющую (t,), можно записать в виде
uд(t)= F()+(t,). (5.26)
Зависимость F() детерминированной составляющей выходного напряжения пеленгатора от рассогласования , являющуюся дискриминационной характеристикой
пеленгатора, часто называют также пеленгационной характеристикой.
Преобразование напряжения uд(t) фильтром с операторным коэффициентом передачи Кф(р) описывается выражением
uф=Kф(p)uд(t). (5.27)
В случае необходимости к фильтру может быть отнесено звено, учитывающее инерционные свойства пеленгатора.
Исполнительное устройство, изменяющее положение РН УСС, может быть электромеханическим, гироскопическим или электронным. Если смещение РН достигается изменением положения зеркала антенны, то в качестве ИУ часто используется электродвигатель. При электрическом управлении диаграммой направленности антенны, например, фазированной антенной решетки, применяются электронные фазовращатели.
При установке антенны на подвижном объекте исполнительное устройство иногда делают гироскопическим с тем, чтобы при отсутствии управляющего напряжения обеспечить постоянство положения диаграммы направленности антенны в пространстве независимо от изменения положения объекта.
Элементы ИУ могут иметь в общем случае нелинейные характеристики, связанные с наличием зоны нечувствительности, люфтом, ограничением, нелинейностью регулировочных характеристик. Без учета указанных нелинейностей, которые обычно стремятся сделать малыми, ИУ можно считать линейным и описать уравнением
а(t)=Kиу(p)uф(t), (5.28)
где Kиу(p) - операторный коэффициент передачи.
При использовании электродвигателя коэффициент Kиу(p) часто записывается в виде Kиу(p)=k/p(l+pTдв), где k - крутизна зависимости угловой скорости вращения антенны в установившемся режиме от величины управляющего напряжения uф(t), постоянная времени Тдв учитывает инерционные свойства двигателя.
Структурная схема системы УСС, соответствующая уравнениям (5.25) - (5.28), показана на рис. 5.19
Рис. 5.19