

4.2. Источники энергии и преобразователи. Аналоги топологических уравнений
Условное графическое изображение источников энергии типа Е и I показано на рис. 4.5.
На рис. 4.6, а приведена схема трансформатора, имеющего математическую модель
![]() (4.7)
(4.7)
где Т – коэффициент трансформации.
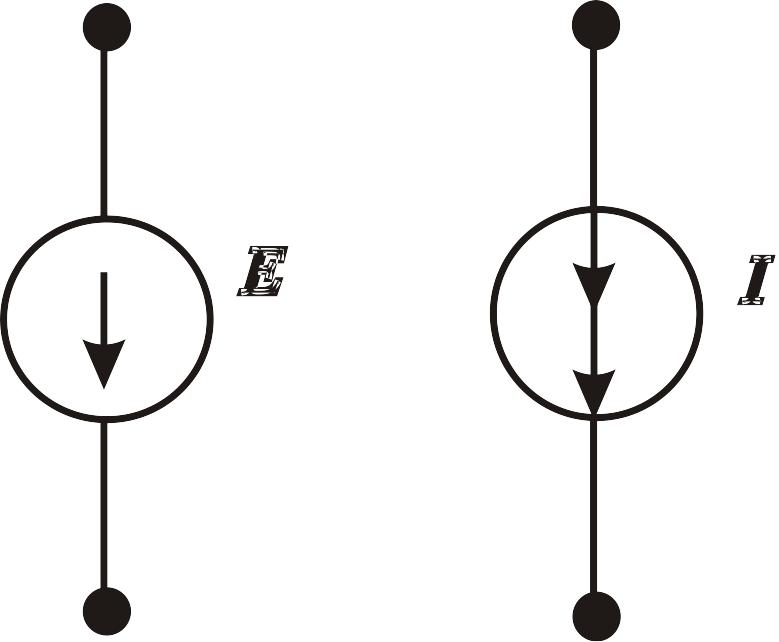
Рис. 4.5. Источники энергии
Примерами трансформаторов в механических подсистемах могут служить рычаги энергии и редукторы.
Гиратор (рис. 4.6, б) имеет модель
![]() (4.8)
(4.8)
где G – коэффициент гирации.
Примером гиратора может служить гидроцилиндр, в котором давление Р преобразуется в силу F, действующую на поршень.
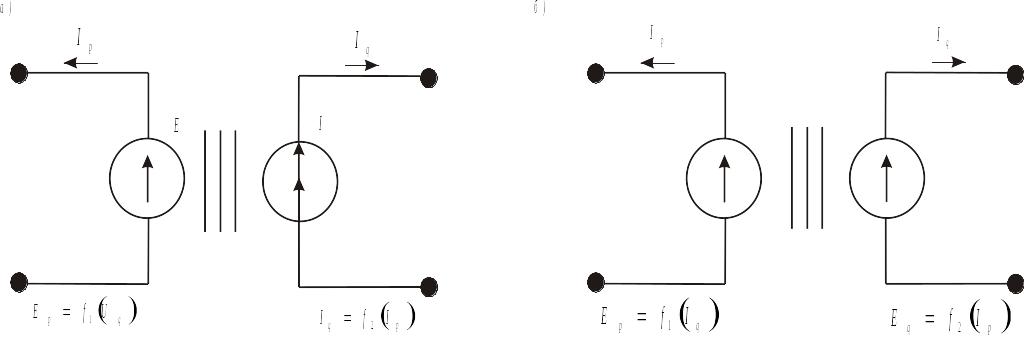
Рис. 4.6. Схемы трансформаторной (а) и гираторной (б) связи
Топологические уравнения типа (4.7), (4.8)
в большинстве физических подсистем
базируются на уравнениях равновесия и
уравнениях неразрывности. Ниже рассмотрены
аналогии топологических уравнений
в подсистемах различной физической
природы. Условимся снабжать индексом
i элементы, примыкающие
к данному узлу, а индексом j
– входящие в данный контур, при этом
в знаках суммы (∑) обозначения «![]() »
или «
»
или «![]() »,
где p, q
– соответственно множество ветвей,
примыкающих к узлу i
и входящих в контур j,
будем опускать.
»,
где p, q
– соответственно множество ветвей,
примыкающих к узлу i
и входящих в контур j,
будем опускать.
Электрическая подсистема
Уравнения равновесия определяют равенство нулю суммы токов в узлах сопряжения элементов; их находят по первому закону Кирхгофа:
![]() (4.9)
(4.9)
Уравнения неразрывности соответствуют второму закону Кирхгофа. Они выражают равенство нулю суммы падений напряжений на элементах схемы, образующих контур:
![]() . (4.10)
. (4.10)
Механическая подсистема
Уравнения равновесия отражают принцип Д' Аламбера: сумма сил, действующих на тело, включая инерционные, равна нулю:
![]() (4.9
а)
(4.9
а)
Для вращательных подсистем суммируются моменты сил, действующих относительно оси вращения.
Уравнения неразрывности определяются принципом сложения скоростей: абсолютная скорость является суммой относительной и переносных скоростей (которых может быть несколько: с первого тела на второе, со второго на третье и т. д.).
![]() . (4.10
а)
. (4.10
а)
Для вращательных подсистем следует суммировать угловые скорости.
Гидравлическая (пневматическая) подсистема
Уравнения равновесия определяют равенство нулю потоков Q, подтекающих к узлу или оттекающих от него:
![]() (4.9
б)
(4.9
б)
Уравнения неразрывности соответствуют сумме падений давлений при обходе по контуру:
![]() . (4.10
б)
. (4.10
б)
Тепловая подсистема
Уравнения равновесия определяют
равенство нулю суммы тепловых потоков
![]() ,
подтекающих или оттекающих от узла, т.
е.
,
подтекающих или оттекающих от узла, т.
е.
![]() (4.9
в)
(4.9
в)
Уравнения неразрывности соответствуют сумме разности температур Tj на участках, входящих в замкнутый контур:
![]() . (4.10
в)
. (4.10
в)
Источники энергии типа потока J и разности потенциалов Е делят на независимые и зависимые.
Независимые источники используют для моделирования постоянных воздействий на объект, например, сила тяжести может быть отражена постоянным источником силы F, напряжение питания электрической схемы – источником типа разности потенциалов.
Зависимые источники делят на две группы: источники, зависимые от времени, и источники, зависимые от фазовых переменных. Первые используют для моделирования внешних воздействий, вторые – для отражения нелинейных свойств объекта, а также для отражения взаимосвязей между подсистемами различной физической природы.
Примером взаимной зависимости двух подсистем p и q различной физической природы может служить трансформаторная связь этих подсистем (см. рис. 4.6). Зависимый источник разности потенциалов в одной подсистеме зависит от разности потенциалов на зависимом источнике потока другой подсистемы, который, в свою очередь, зависит от потока через первый источник.
Эквивалентные схемы технических объектов строят путем объединения в ансамбль всех элементов подсистем (в том числе различной физической природы), образующих данный технический объект. В эквивалентной схеме отражаются элементы и свойства реального объекта, оказывающие существенное влияние на его функционирование.
Двухполюсники (рис. 4.2...4.6), моделирующие элементы и (или) компоненты подсистем, соединяют между собой в соответствии со структурой подсистемы и с учетом функциональных связей между компонентами. В первую очередь рекомендуется объединять наиболее существенные элементы. Так, при моделировании механических подсистем вначале выделяют компоненты типа массы. Один из полюсов двухполюсника (рис. 4.2, б) соединяют с базовым узлом, отражающим инерциальную систему отсчета, второй полюс характеризует воздействие этой массы на некоторые элементы объекта, поэтому его следует соединить с полюсами этих элементов. Далее в механической подсистеме выделяют элементы трения и упругости. Элементы трения (рис. 4.4) включают между контактирующими телами, элементы упругости (рис. 4.3) – между телами, соединенными упругой связью. Внешние силы отображают включением источника силы между базисным и тем узлом, к которому подключен элемент массы, подверженной действию этой силы.
Построение эквивалентных схем рассмотрим на конкретных примерах.
Муфта сцепления автомобиля (рис. 4.7)
служит для регулирования плавного
соединения коленчатого вала
![]() двигателя с первичным валом
двигателя с первичным валом
![]() коробки передач.
коробки передач.
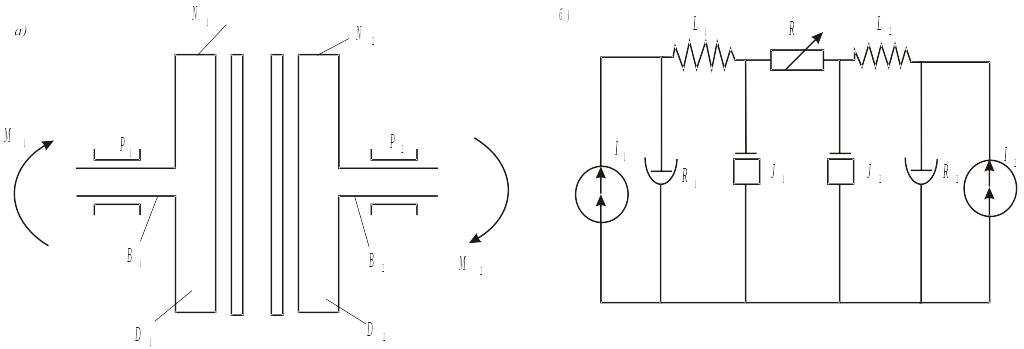
Рис. 4.7. Муфта сцепления (а) и её эквивалентная схема (б)
Крутящий момент
![]() через
вал
имеющий
крутильную жесткость
через
вал
имеющий
крутильную жесткость
![]() передается
на маховик и диск
передается
на маховик и диск
![]() с фрикционной накладкой
с фрикционной накладкой![]() .
Суммарный момент инерции ведущего диска
равен
.
Суммарный момент инерции ведущего диска
равен
![]() .
Небольшая часть крутящего момента
теряется в подшипнике
.
Небольшая часть крутящего момента
теряется в подшипнике
![]() с коэффициентом трения
с коэффициентом трения
![]() .
Когда диски прижаты друг к другу, крутящий
момент через фрикционные накладки
.
Когда диски прижаты друг к другу, крутящий
момент через фрикционные накладки
![]() передается на ведомый диск
передается на ведомый диск
![]() и далее через вал
,
на коробку передач.
и далее через вал
,
на коробку передач.
Эквивалентная схема полностью отражает
механизм передачи крутящего момента
от двигателя до коробки передач. Момент
моделируется током
![]() трение
в подшипнике
– резистором
,
гибкость вала
– индуктивностью
,
масса ведущего диска – моментом инерции
.
Работу фрикционных накладок отражает
резистор R. Дальнейшая передача
момента от диска
до коробки передач аналогична
рассмотренной.
трение
в подшипнике
– резистором
,
гибкость вала
– индуктивностью
,
масса ведущего диска – моментом инерции
.
Работу фрикционных накладок отражает
резистор R. Дальнейшая передача
момента от диска
до коробки передач аналогична
рассмотренной.
Примером механической поступательной
системы (рис. 4.8) служит автомобиль массой
![]() ,
который перевозит груз массой
,
который перевозит груз массой
![]() и
прицеп массой
и
прицеп массой
![]() .
В прицепе находится подпружиненный
груз массой
.
В прицепе находится подпружиненный
груз массой
![]() .
.
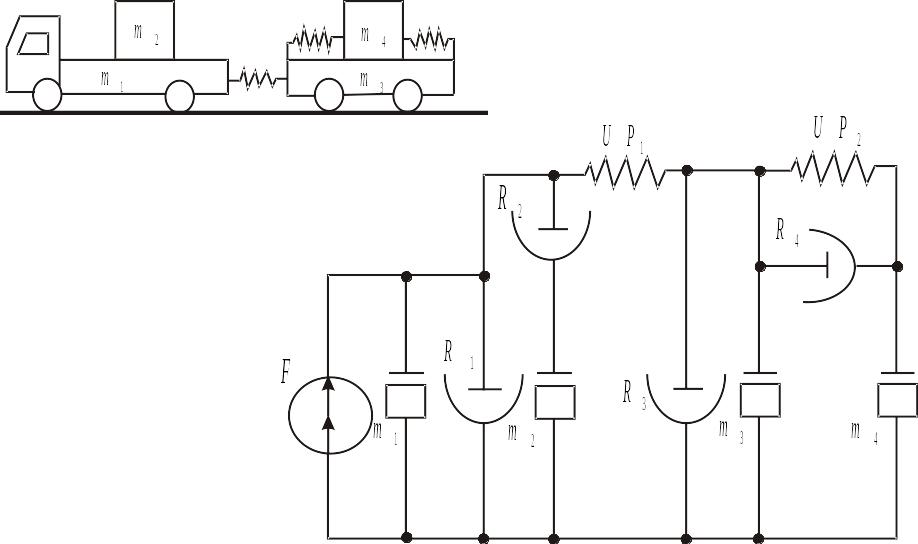
Рис. 4.8. Поступательная механическая система и её
эквивалентная схема
На рисунке F –
тяга автомобиля;
![]() и
и
![]() – приведенные коэффициенты трения
между грузами и кузовами автомобиля и
прицепа;
– приведенные коэффициенты трения
между грузами и кузовами автомобиля и
прицепа;
![]() и
и
![]() – упругости сцепления и пружины крепления
груза к прицепу.
– упругости сцепления и пружины крепления
груза к прицепу.
В качестве примера системы, состоящей из электрической, механической и пневматической подсистем, рассмотрим вибронасос (рис. 4.9). Под воздействием переменного магнитного поля, возникающего в зазоре электромагнита, приходит в движение груз массой т. Этот груз, шарнирно связанный через рычаг с насосом, действует на сильфон S, который, пульсируя, прокачивает воздух через клапаны k.
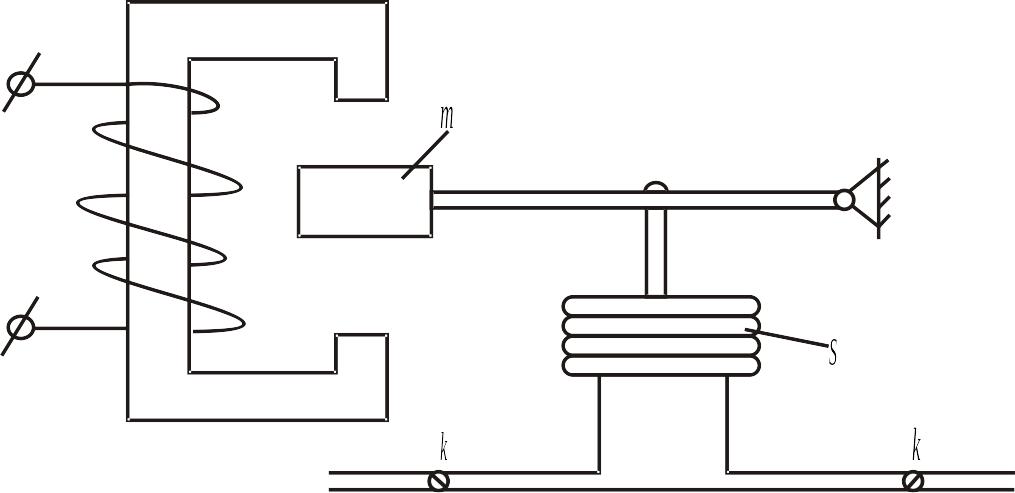
Рис. 4.9. Схема вибронасоса
В устройстве можно выделить конструктивно самостоятельные простые подсистемы, доказанные на эквивалентной схеме замещения (рис. 4.10): обмотку электромагнита 1, электромагнит 2, рычажный механизм 3, сильфон и воздушную магистраль с клапаном 4. Связи этих подсистем осуществляются гираторами для пар 1-2 и 3-4 и трансформатором – для пары 2-3.
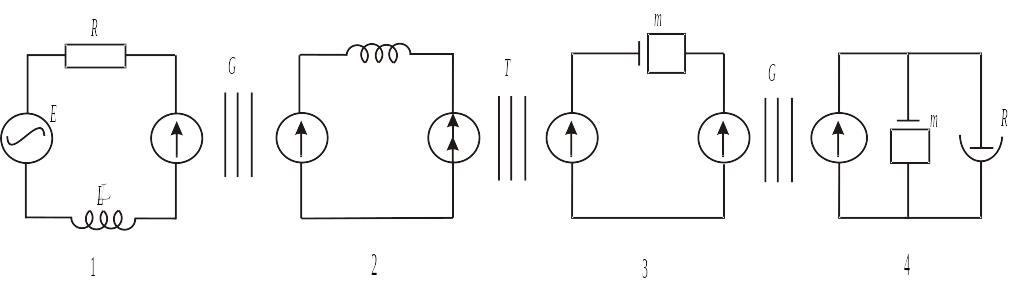
Рис.4.10. Эквивалентная схема замещения вибронасоса