

3.1. Интегрирующее звено
Интегрирующим называется звено, выходная величина которого пропорциональна интегралу по времени от входной величины:
 .
.
Продифференцируем левую и правую части этого уравнения
![]() .
(3.2)
.
(3.2)
Из выражения (3.2) видно, что скорость изменения выходной величины интегрирующего звена пропорциональна входной величине. При этом коэффициент К численно равен скорости изменения выходной величины при единичном значении входной.
Вообще выходная величина может неограниченно нарастать или убывать при неизменном значении входной величины. Но в отличие от апериодического и колебательного звеньев в интегрирующем нет определенного соотношения между Хвх и Хвых, а есть лишь определенное соотношение между значениями входной величины и скоростью изменения выходной величины.
Примеры интегрирующих звеньев приведены на рис. 3.2. На всех этих примерах получается изменение выходной величины при единичном скачке входной величины, как показано на рис. 3.1в. В случае объекта регулирования в виде резервуара входной величиной служит поток поступающей жидкости (рис. 3.2а), а выходной – высота столба жидкости; в случае электродвигателя (рис.3.2б) за входную величину принимается напряжение на якоре, а выходной – служит угол поворота якоря (или ротора); в поршневом сервоприводе, как объекте регулирования, что видно из рис.3.2в, в качестве входной величины принимается поток масла q, а выходной величины ход поршня Z и, наконец, рис. 3.2г Хвх и Хвых – напряжение.
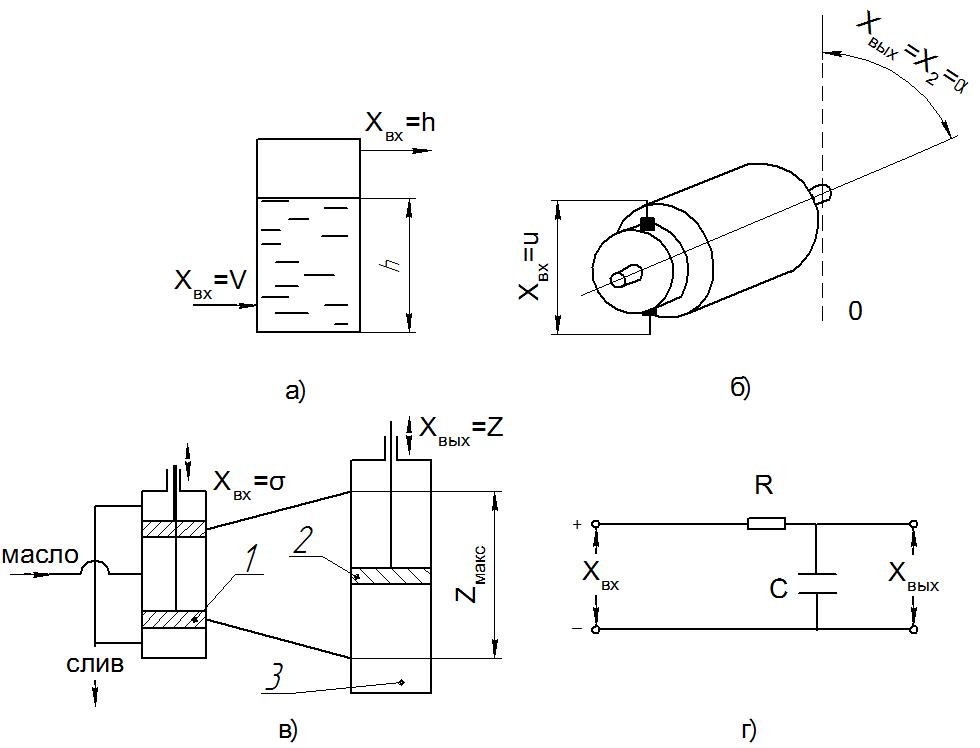
Рис.3.2. Примеры систем автоматического регулирования (объект регулирования), которые замещаются интегрируемым звеном: а) резервуар, заполняемый жидкостью, б) электродвигатель постоянного тока, в) поршневая система Ползунова: 1 – золотник, 2 – поршень; г) RC - цепочка.
Рассмотрим случай показанный на рис.3.2в. Будем считать, что профиль окна у золотника закрывается поршнем и при его смещении от среднего положения допустим вниз, обеспечивает поток масла q, поступающего в цилиндр 3. Поршень 2 под его действием перемещается вверх на пропорциональную величину Z. Уравнение движения запишем
![]() ,
(3.3)
,
(3.3)
где К1 – коэффициент движения, зависящий от параметров передаточного механизма.
Введя значения Хвх и Хвых, запишем
![]() .
(3.4)
.
(3.4)
Это есть уравнение интегрирующего звена в общем виде, из него видно, что оно характеризуется одним параметром К1 который иначе называется передаточный коэффициент – представляет отношение скорости изменения выходной величины к входной величине.
3.1.1. Переходная функция
Полагая, что входная величина в уравнении (3.4) является единичной ступенчатой функцией, получим выражение для переходной функции интегрирующего звена
h(t) = Кt. (3.5)
Эта зависимость показана на рис. 3.1в.
3.1.2. Частотные характеристики
Для этого составим уравнение передаточной функции
![]() .
(3.6)
.
(3.6)
Заменим s на jω и получим выражение
 .
(3.7)
.
(3.7)
При изменении ω от 0 до бесконечности конец вектора W(jω) движется по отрицательной части мнимой оси от –∞ до нуля (рис.3.3). Интегрирующее звено создает отставание выходной величины на 900 при всех частотах. Амплитуда выходной величины тем меньше, чем больше частота.

Рис.3.3. Амплитудно-фазовая характеристика интегрирующего звена