

9. Преобразование сигналов и методы их передачи на расстояние
Прежде чем вести речь о передаче сигналов на расстояние отметим их необходимость преобразовать их в вид удобный для этой передачи. В технике низких температур, где изменения температур составляют довольно значительный диапазон и в нем возможны фазовые переходы рабочего вещества от газового и (или) парообразного состояния до жидкого (или) твердого, чаще всего используются электрические сигналы, поэтому в этой лекции будут рассмотрены наиболее распространенные из них:
1 – индукционная система передачи,
2 – дифференциально-трансформаторная система,
3 – сельсинная передающая система.
В каждой из них предполагается линейное или угловое перемещение указателя – плунжера или ротора из магнитомягкого материала, обеспечивающего заметное изменение потокосцепления при его смещении относительно катушки или катушек индуктивности преобразователя соединенных между собой тем или иным способом (последовательно, дифференциально, звездой и т.д.).
9.1. Индукционная система передачи
Эта система применяется для передачи показаний манометров, уровнемеров узкого диапазона и приборов другого типа.
Система индукционной передачи плунжерного типа представляет собой индукционный самобалансирующийся мост (рис.9.1).
Схема индукционного моста состоит из двух пар индукционных катушек 1–2 и 3–4, соединенных по схеме моста Уитстона. В диагональ (вг) подается питание напряжением 12 В от понижающего трансформатора, а диагональ (аб) обеспечивает передачу тока (сигнала) управляющего перемещением плунжера 6. Одна пара катушек 1–2 соединенных последовательно является датчиком, а вторая 3–4 приемником. В обеих парах катушек помещены сердечники 5 и 6 из материала с большой магнитной проницаемостью. Сердечник 5 допустим соединен рычажной передачей с чувствительным элементом первичного прибора, а сердечник 6 вторичного прибора рычажно-секторной передачей – с указывающей стрелкой вторичного прибора. При симметричном положении сердечников относительно катушек полные сопротивления всех четырех катушек одинаковы и следовательно мост находится в состоянии равновесия, потенциалы точек (а) и (б) равны и в диагонали моста (аб) тока нет. Перемещение сердечника 5 датчика изменяет величину реактивного сопротивления катушек 1 и 2, увеличивает сопротивление катушки, в которую входит сердечник и уменьшает сопротивление другой. Разность потенциалов точек (а) и (б) изменяется, и в этой диагонали возникает ток, вызывающий изменение магнитных полей катушек 3 и 4. В результате сердечник 6 втягивается в одну из катушек, повторяя движение сердечника первичного прибора.
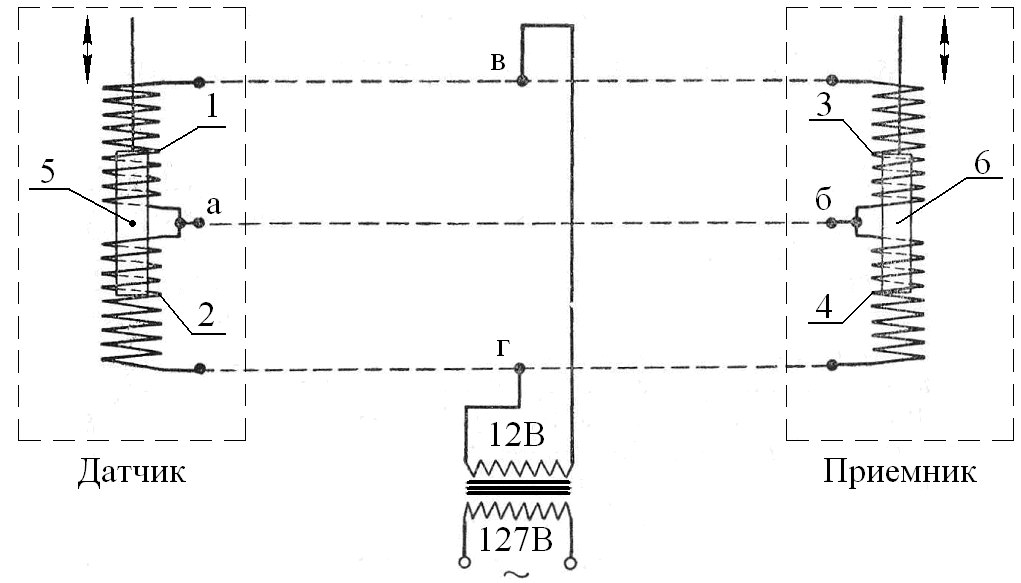
Рис.9.1. Схема индукционного мостика телепередатчика: 1–4– катушки; 5 и 6 – плунжеры из магнитомягкого материала
Индукционная система передачи проста и может применяться во всех тех случаях, когда допустима некоторая погрешность передачи, вызываемая трением в механизме вторичного прибора (приемника).
Сила трения создает сопротивление перемещению сердечника 6, из-за чего он останавливается до достижения строго синфазного положения с сердечником 5 датчика. При этом в диагонали (аб) продолжается течь ток (так называемый ток нечувствительности), магнитное поле которого в катушке не в состоянии преодолеть ситу трения. Кроме того, в цепях катушек должны протекать значительные токи, создающие сопротивление перемещению сердечника 5 в катушках датчика, что вызывает необходимость применения в качестве датчиков приборов, обладающих значительной передвигающей силой.
Эти недостатки в значительной мере устранены в дифференциально-трансформаторной системе передачи, работающей по компенсационной схеме.