

Классификация основных элементов система автоматического регулирования по назначению
В качестве примера рассмотрим поэлементно общую схему САР, которая показана на рис.1.3.
Основные элементы САР:
1 – управляющий или задающий элемент, который участвует в создании входного сигнала;
2 – элемент сравнения, в котором происходит сравнение по величине и знаку задающего сигнала и сигнала главной обратной связи;
3 – усилительный элемент, предназначенный для увеличения чувствительности системы;
4 – последующий преобразующий управляющий элемент для придания системе необходимых динамических свойств;
5 – исполнительный элемент (сервопривод), вырабатывающий воздействие, прикладываемое к объекту регулирования (ОР). Он включает и регулирующий орган (РО), как элемент самого воздействия на ОР;
6 – корректирующий элемент, который воздействует на сигнал прямой связи, и играет роль местной обратной связи;
7 – объект регулирования (ОР), как основной технологический аппарат, параметры которого подлежали регулированию;
8 – элемент главной обратной связи, который вырабатывает сигнал пропорциональный регулируемой величине.
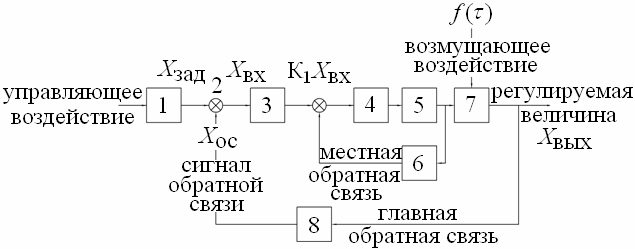
Рис.1.3. Полная схема системы автоматического регулирования
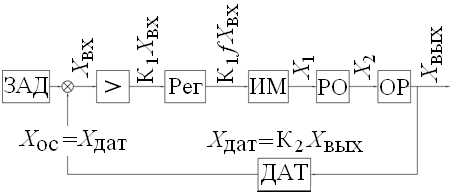
Рис.1.4. Функциональная схема САР: ЗАД – задатчик; > – усилитель с коэффициентом усиления К1; Рег – регулятор с установленным законом регулирования f(у)Хвх; ИМ – исполнительный механизм (иногда сервопривод); РО – регулирующий орган (может быть вентиль, клапан и др.); ОР – объект регулирования, ДАТ – датчик (включает чувствительный элемент и преобразователь)
2. Передаточные и переходные функции основных звеньев систем автоматического регулирования
Элементы САР имеют в своей основе функции:
определения регулируемой величины;
выяснения ее отклонения от заданной величины;
формирования по определенному закону управляющего сигнала; усиления его с целью перемещения регулирующего органа.
Несмотря на то, что элементы системы автоматического регулирования имеют самое разнообразное конструктивное оформление, и разный принцип действия, но они описываются в зависимости от их назначения, в системе схожими или одинаковыми дифференциальными уравнениями и, следовательно, имеют одинаковые передаточные функции. Таким образом, элементы систем автоматического регулирования могут быть заменены (представлены) ограниченным числом простейших звеньев, следовательно, при условии их экспериментально исследованных переходных процессов или составления дифференциальных управлений, как правило, имеющих порядок не выше второго. При этом следует иметь в виду, что не всегда один элемент системы заменяется одним звеном или наоборот.
Необходимо помнить, что САР являются системами направленного действия, в которых воздействия могут проходить только в одном направлении (пример в системе с тепловым объектом регулирования (котел), где регулируемым параметром является температура, которая измеряется термопарой (чувствительный элемент) ее изменяемая э.д.с. зависит от объекта регулирования, но не наоборот. Такое действие называется детектирующим и звено, как мы отмечали, имеет вход (Хвх) и выход (Хвых), а входная величина не зависит от изменения выходной величины.
Прежде чем переходить к классификации звеньев вспомним из математики, что уравнения установившихся режимов, т.е. уравнения статики это обычно уравнения алгебраические, а уравнения переходных процессов это уравнения динамики, которые являются дифференциальными или интегро-дифференциальными (это для систем сосредоточенными параметрами), а для систем с распределенными параметрами (например, колонна разделения воздуха) получаются уравнениями в частных производных. Они определяют поведение системы автоматического регулирования в переходном процессе при действии возмущающих сил или после прекращения их действия. Обычно задачу составления дифференциальных уравнений процесса регулирования облегчает применение уравнений Лагранжа второго рода, составленных для обобщенных координат системы. Например, этот метод целесообразно использовать тогда, когда составление выражений кинетической и потенциальной энергий системы, а также диссипативной функции не является затруднительным.
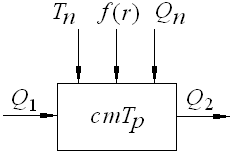
Рис.2.1. Схема к расчету тепловых процессов холодильника
Преобразования Лапласа для простейших функций:
1) Единичная ступенчатая функция, которая графически показана на рис.2.2 и записывается в виде:
f(t) = [1],
где [1] обозначена функция, удовлетворяющая условиям (показано на рис.)
[1] =1; t > 0,
[1]=0; t < 0.
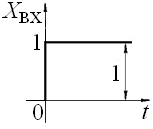
Рис.2.2. График ступенчатой функции
Вспомним исходную запись экспоненциальной формы интеграла Фурье, которая имеет вид
 .
(2.1)
.
(2.1)
Это выражение интеграла Фурье можно написать для вынужденных колебаний системы в случае действия возмущения f(t)
 ,
(2.2)
,
(2.2)
где
 .
(2.3)
.
(2.3)
Функция F(j) называется преобразованием Фурье или комплексным спектром функции f(t).
Полагая,
что период Т
→ ∞, запишем круговую частоту вращения
![]() .
.
Преобразование Лапласа можно рассматривать как обобщенную форму преобразования Фурье, применимую для функций f(t) удовлетворяющих условию
F (t) = 0 при t 0.
Вместо уравнений (2.2) и (2.3) можно записать функцию комплексного переменного s, которая называется преобразованием Лапласа для функции f (t). В этом случае F(s) называют изображением функции f (t), т.е. оригинала
 ,
(2.4)
,
(2.4)
 ,
(2.5)
,
(2.5)
где с – некоторое положительное число, которое определяет сходимость функции f (t).
А сама эта функция называется формулой обращения для функции F(s). Эти формулы можно записать сокращенно в виде
f (t) = L-1[F(s)]; (2.6)
F (s) = L[f(t)]. (2.7)
Воспользовавшись формулой (2.4) получим
![]() .
.
Итак,
![]() ,
(2.8)
,
(2.8)
![]() .
(2.9)
.
(2.9)
На основании уравнений (2.8) и (2.4) ступенчатая единичная функция [1] может быть представлена в виде интеграла

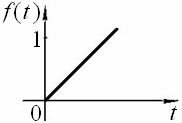
Рис.2.3. График интегральной функции
2) Показательная функция, график ее представлен на рис.2.4.
Пусть
(2.10)
Имеем
 (2.11)
(2.11)
Также
![]() (2.12)
(2.12)
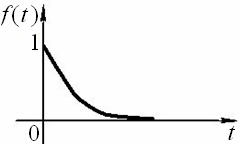
Рис.2.4. График показательной функции
3) синусоида f(t) = sinβt
График функции показан на рис.2.5.
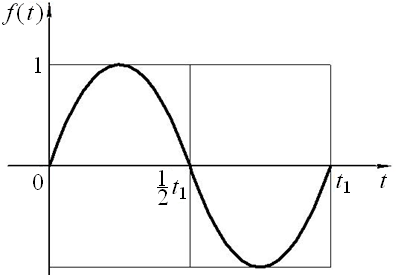
Рис.2.5. График синусоидальной функции
Имеем
 (2.13)
(2.13)
4) косинусоида f(t) = сosβt
График этой функции показан на рис.2.6.
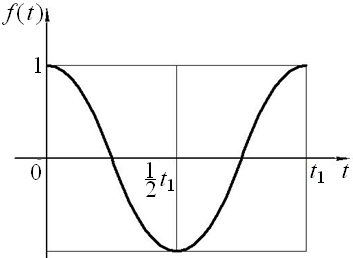
Рис.2.6. График косинусоидальной функции
 (2.14)
(2.14)
5) Затухающие синусоидальные колебания
![]() (2.15)
(2.15)
где α и β – положительные вещественные числа.
График функции показан на рис.2.7.
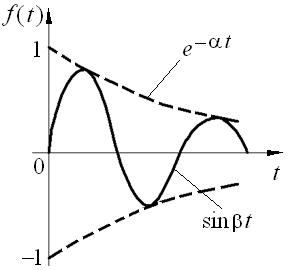
Рис.2.7. График затухающей синусоиды
Имеем

Итак,
![]() ,
(2.16)
,
(2.16)
 .
(2.17)
.
(2.17)
Передаточные функции систем автоматического регулирования
Передаточные функции используются для анализа систем автоматического регулирования. Определение передаточной функции можно получить из преобразования Лапласа для решения дифференциального уравнения n-го порядка
![]() .
(2.18)
.
(2.18)
Для простоты берется случай нулевых начальных условий, т.е. в момент приложения воздействия t = 0 система находилась в покое. При этом
 ,
n
= 0,2,3…, n–1.
(2.19)
,
n
= 0,2,3…, n–1.
(2.19)
Предположим также, что (см. случай, показанный на рис.2.1)
F (t) = 0, t < 0. (2.20)
Умножая члены уравнения (2.18) на е–st, интегрируя от 0 до ∞ и принимая во внимание (2.19) и (2.20) найдем
![]() (2.21)
(2.21)
где
![]()
 ,
,
 .
.
Можно записать преобразование Лапласа Х(s) для отклонения регулируемой величины, вызываемого возмущающим воздействием определяемой формулой
X(s) = Y(s)·F(s). (2.22)
Откуда
![]() .
.
Функция Y(s) есть передаточная функция динамической системы, т.е. она представляет собой отношение преобразования Лапласа для величины на выходе к преобразованию Лапласа для воздействия на входе при нулевых начальных условиях. Зная передаточную функцию, можно найти переходный процесс при любом заданном воздействии и начальных условиях. Вообще можно получить передаточную функцию и разомкнутой системы САР, которая называется САУ (система автоматического управления) и записать в виде
 .
(2.23)
.
(2.23)
Тогда в общем виде любую систему автоматического регулирования можно представить в виде структурной схемы, показанной на рис.2.8.
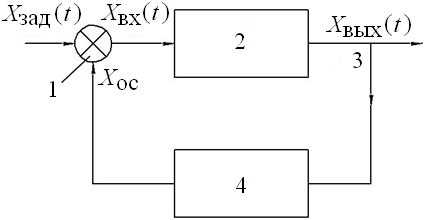
Рис.2.8. Простейшая схема САР с элементом сравнения
На рисунке показана одноконтурная динамическая система с обратной связью. Она состоит из элемента сравнения 1, структурного элемента 2, (включающего все элементы системы между элементом сравнения и выходом), точки разветвления 3, откуда берется сигнал обратной связи, а также 4 – элемент обратной связи. Если обозначить передаточные функции структурных элементов 2 и 4 через W1(s) и Z1(s), то уравнения этих элементов имеют вид
Xвых(s) = W1(s)·Xвх(s), (2.24)
где
Хвх = Хзад Хос,
Хос(s) = Z1(s)·Xвых(s). (2.25)
Передаточная функция системы записывается в виде
![]() .
(2.26)
.
(2.26)
Обратная связь бывает положительная (если ее сигнал складывается с входным) и отрицательная (он вычитается).