

Учебное пособие 1733
.pdfm = |
1 |
b d |
(M |
)ydS = |
1 |
|
b d (M |
)y2dx, |
|||||||
2 |
2 |
|
|||||||||||||
|
x |
|
|
ò |
|
|
|
|
|
ò |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
a |
|
|
(3) |
|
|
|
1 |
b d |
|
|
|
|
1 |
b d |
|
|
|||
m |
|
= |
( |
M |
xdS = |
|
( |
M |
xydx, |
||||||
y |
|
|
|
||||||||||||
|
|
2 |
ò |
|
) |
|
2 |
|
ò |
|
) |
||||
|
|
|
a |
|
|
|
|
|
a |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где d (M) — плотность в точке М, dS = ydx – дифференциал площади.
Для случая геометрических фигур плотность считается равной единице.
Статический момент тела относительно данной плоскости,
если |
известны |
|
площади |
поперечных |
сечений |
||||
параллельных этой плоскости S(x) в функции расстояния x от |
|||||||||
нее, при |
плотности, |
равной |
единице, определяется |
||||||
интегрированием статического момента элементарного слоя |
|||||||||
тела на расстояниих от |
плотности dm = xS(x)dx в заданных |
||||||||
пределах |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
myz |
= ò xS(x )dx . |
|
|
(4) |
||
|
|
|
|
|
a |
|
|
|
|
Статический |
момент |
тела |
вращения |
относительно |
|||||
плоскости, перпендикулярной оси вращения х, определяется |
|||||||||
по формуле |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
myz |
= p ò xy2dx . |
|
|
(5) |
||
|
|
|
|
|
|
a |
|
кривойу = f(x) |
|
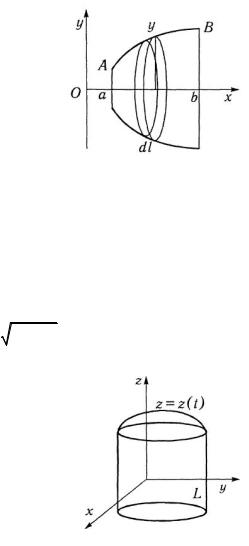
Если |
поверхность образована вращением |
||||||||
(a £ x £ b) |
|
вокруг |
оси Ох |
(рис. 3.37) и |
поверхностная |
||||
плотность |
ее |
равна |
|
единице, то |
статический |
момент |
|||
относительно плоскости, |
перпендикулярной |
оси вращения, |
|||||||
находится |
интегрированием |
элементарного |
кольцевого слоя |
||||||
2pydl в заданных пределах |
|
|
|
|
|
||||
|
|
|
b |
|
|
b |
|
|
|
|
|
myz = 2p ò xydl = 2p òxy 1 + (y¢ )2 dx |
|
(6) |
|||||
|
|
|
a |
|
|
a |
|
|
|
141
|
|
|
|
Рис. 3.37 |
|
|
|
||||
|
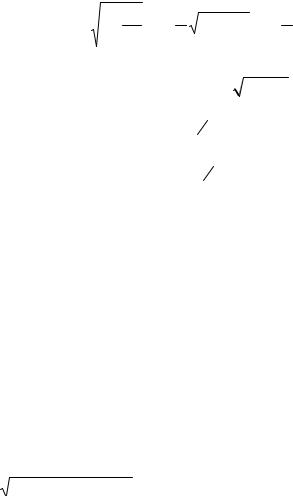
Статические |
|
моменты |
относительно |
координатных |
||||||
плоскостей для цилиндрической поверхности х = x(t), у = y(t) |
|||||||||||
с |
образующими |
параллельными |
осиz (рис. |
3.38) и |
|||||||
ограниченной сверху кривой z = z(t) находятся по формулам |
|||||||||||
|
|
ò |
|
|
ò |
|
2 |
ò |
|
|
|
|
myz = |
|
xzdl; mzx = |
|
yzdl; |
mxy = |
1 |
|
z2dl, |
(7) |
|
|
L |
L |
|
L |
|||||||
|
|
|
|
|
|
|
|
|
|||
где |
dl = x&2 + y&2 dt; |
L – проекция |
поверхности на |
плоскость |
|||||||
xOy. |
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.38
20. Моментом инерции материальной точки массыm относительно оси l называется произведение её массы на квадрат расстояния d от оси Ii = md 2 .
142

Моментом инерции системыn материальных точек называется сумма произведений масс этих точекm1 , m2 ,..., mn
n
на квадрат расстояния их от оси Ii = åmi di2 .
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
Моменты |
|
|
|
|
инерции |
|
относительно |
|
координатных |
|
осей |
||||||||||
плоской |
кривой y = f (x) (a £ x £ b) |
|
|
вычисляются |
|
по |
|||||||||||||||
формулам |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
b |
( ) |
2 |
b |
( ) |
|
2 |
|
( |
|
|
|
2 |
|
|
|
|
|
|
|
|
òa |
|
òa |
|
|
|
|
|
¢ |
) |
|
|
|
|
|||||
|
I = d x y dl = d x y 1+ |
|
y |
|
dx, |
(8) |
|
|
|||||||||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
b |
( ) |
2 |
b |
( ) |
2 |
|
( |
|
|
|
2 |
|
|
|
||
|
|
y |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
òa |
|
òa |
|
|
|
|
¢ |
) |
|
|
|
|
||||||
|
I = d x x dl = d x x 1+ |
|
y |
|
dx, |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
где d (x) - плотность, |
dl - дифференциал дуги. |
|
|
|
|
|
|
|
|||||||||||||
Моменты |
|
|
|
|
|
инерции |
|
|
|
криволинейной |
, |
трапе |
|||||||||
ограниченной кривой y = f (x), |
осью Ox |
и двумя |
прямыми |
|
|||||||||||||||||
x = a и x = b вычисляются по формулам |
|
|
|
|
|
|
|
|
|
|
|||||||||||
I x |
= |
1 |
òab d (M )y 3 dx ; I y |
= òab d (M x)2 ydx . |
|
(9) |
|
|
|||||||||||||
3 |
|
|
|
||||||||||||||||||
Моменты |
|
|
|
|
инерции |
плоской |
|
|
фигуры(рис. 3.39), |
|
|||||||||||
ограниченной |
|
|
кривыми y1 |
= f1 (x), y2 = f 2 (x), |
относительно |
|
|||||||||||||||
осей координат вычисляются по формулам |
|
|
|
|
|
|
|
|
|
||||||||||||
Рис. 3.39
143

I |
x |
= |
d d |
( |
M y2 |
( |
j |
2 |
( |
y -j |
y |
)) |
||
|
|
òc |
) |
|
|
) |
1 ( |
|
||||||
I |
y |
= |
d d |
( |
M x2 |
( |
f |
2 |
( |
y - f |
1 ( |
y |
)) |
|
|
|
òc |
) |
|
) |
|
||||||||
dy,
; (10)
dx,
здесь функции j1 ( y ) = x1 ,j2 (y ) = x2 представляют уравнения
заданных кривых, разрешённых относительно переменной x .
6.1. Найти статические моменты и моменты инерции
относительно |
оси Ox |
дуги: |
а) кривой |
y = e x (0 £ x £ 1); |
|
|||||
б) астроиды |
x |
23 + y |
23 |
= a |
2 3 , |
лежащей |
в |
первом |
квадрате, |
|
d (x) = 1 ; в) окружности x 2 |
+ y 2 |
= a 2 , расположенной в первом |
|
|||||||
квадранте, |
если |
|
в |
|
каждой |
|
её |
точке |
плот |
|
пропорциональна произведению координат точки. |
|
|
||||||||
Решение. |
а) статический |
момент |
относительно |
осиOx |
|
|||||
находим по первой из формул(1), полагая плотность равной единице
|
|
|
|
|
mx = ò01 e x 1 + e2 x dx |
|
|
|
|
|
|
|
|
|||||||
Делая замену t = e x , |
dt = ex dx , получим mx = ò1e |
1+ t 2 dt . |
|
|||||||||||||||||
Интегрируя |
по |
|
частям: u = |
1 + t 2 , |
dv = dt ; |
du = |
tdt |
, |
||||||||||||
t = v , будем иметь |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 + t 2 |
|
|||
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|||||
mx = t 1+ t 2 - |
e |
1+ t 2 dt + |
e |
|
, |
|
|
|
|
|||||||||||
ò1 |
ò1 |
1+ t2 |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
mx = ò1e |
|
1+ t 2 dt = |
1 |
(t 1+ t2 + ln (t + 1+ t2 )) |
|
1e |
= |
|
||||||||||||
|
|
|
||||||||||||||||||
|
2 |
|
||||||||||||||||||
|
|
1 |
æ |
|
|
|
|
|
|
|
e + |
1 + e |
2 |
ö |
|
|
|
|
|
|
= |
ç |
e |
1 + e |
2 |
|
- |
2 + ln |
|
÷ |
|
|
|
|
|
||||||
|
ç |
|
|
|
|
|
|
. |
|
|
|
|
|
|||||||
|
|
2 |
|
|
|
|
|
|
|
1 + |
2 |
|
÷ |
|
|
|
|
|
||
|
|
è |
|
|
|
|
|
|
|
|
ø |
|
|
|
|
|
||||
По первой из формул(8) находим момент инерции относительно оси Ox
144

|
|
I |
|
|
|
1 e2 x 1+ e2x dx = |
1 |
|
1 |
|
1+ e2 x |
) |
1 |
d 1+ e2 x |
) |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
= |
|
|
2 |
= |
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
x |
|
|
ò0 |
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
ò0 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
( |
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
1 |
|
|
2x |
|
|
3 |
|
1 |
|
1 |
æ |
|
|
|
2 |
|
3 |
|
|
|
|
|
|
|
ö |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
= |
|
(1+ e |
|
|
) |
|
|
|
= |
|
|
|
ç(1+ e |
|
) |
|
|
|
- 2 2 |
÷. |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 3 è |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ø |
|
|
|
|
|
|
|
|
||||||
|
б) Запишем уравнение астроиды в параметрическом виде |
||||||||||||||||||||||||||||||||||||||||||||
x = a cos3 t , |
y = a sin 3 t . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
При нахождении статического момента относительно оси |
||||||||||||||||||||||||||||||||||||||||||||
Ox |
воспользуемся |
|
|
|
|
формулами(1), |
|
для |
|
|
|
этого |
|
вычислим |
|||||||||||||||||||||||||||||||
дифференциал дуги |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
dl = |
|
x&2 + y&2 dt = 3a |
|
cos4 t sin2 t + sin4 t cos2 tdt = |
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
= 3a sin t cos t dt , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
p |
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3a |
2 |
|
|
|
|
p |
|
|
|
3 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||||||
|
mx = ò0 |
2 ydl = 3a2 ò0 |
2 sin3 t sin t cos tdt = |
|
|
sin5 t |
|
|
= |
|
a2 . |
||||||||||||||||||||||||||||||||||
|
|
|
|
0 |
|
2 |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Момент инерции по формулам (8) равен |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
p |
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3a |
3 |
|
|
|
|
|
p |
|
|
3 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||||||
I x |
= ò0 |
2 y 2 dl = 3a3 ò0 |
2 sin 6 t sin t cos tdt = |
|
sin 8 |
t |
|
= |
a 3 . |
||||||||||||||||||||||||||||||||||||
|
|
0 |
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
8 |
|
|
|||||
|
Следует |
|
заметить, |
|
что |
|
|
|
|
в |
|
|
силу |
|
|
|
симметрии |
|
астроиды |
||||||||||||||||||||||||||
относительно координатных осей mx = my |
= |
3 |
a 2 и |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I x |
= I y |
= |
a 3 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) Статический момент и момент инерции находим по |
||||||||||||||||||||||||||||||||||||||||||||
формулам (1) и (8). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Дифференциал дуги |
|
равен dl |
|
= |
|
|
1 + (y )2 dx |
, |
|
где y¢ |
|||||||||||||||||||||||||||||||||||
находим |
|
|
из |
|
дифференцирования |
|
|
|
|
|
уравнения |
|
окружности |
||||||||||||||||||||||||||||||||
2x + 2 yy¢ = 0 , y¢ = - x . y
Окончательно
145
|
dl = 1 + x 2 |
dx = 1 |
y 2 + x 2 dx = a dx . |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
y 2 |
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|||
Таким образом, |
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
mx = ò0a kxy × y |
dx = kaò0a x |
a2 - x2 dx = |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
= - |
ka |
ò0a |
(a2 - x2 )12 d (a2 - x2 )= |
|
|
||||||||||||||||||||||||||||
|
|
2 |
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
= - |
ka |
(a 2 - x 2 )3 2 |
|
|
a |
= |
|
ka 4 |
. |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
3 |
|
|
|
|
|
|
|||||
I x |
= ò0a kxy × y 2 |
|
a |
dx = kaò0a xy 2 dx = kaò0a x(a 2 - x 2 )dx = |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
æ |
|
|
|
2 |
x 2 |
|
|
x 4 ö |
|
a |
|
|
ka |
5 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
ç |
|
|
|
|
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
. |
|
|
|
||||||||
|
|
|
= kaça |
|
|
|
|
|
- |
|
|
÷ |
|
|
|
|
= |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
è |
|
|
|
|
|
|
4 ø |
|
0 |
|
|
|
|
|
|
|
|
||||||||||||
Здесь k |
- коэффициент пропорциональности. |
|
|
|
|||||||||||||||||||||||||||||||
6.2. Найти статический момент и момент инерции |
|
||||||||||||||||||||||||||||||||||
полуокружности радиуса a относительно её диаметра. |
|
|
|||||||||||||||||||||||||||||||||
Решение. |
Расположим |
|
|
декартову |
|
систему |
координат |
|
|||||||||||||||||||||||||||
таким образом, чтобы ось Ox |
совпала |
с диметром, а начало |
|
||||||||||||||||||||||||||||||||
координат с центром окружности. В этом случае уравнение |
|
||||||||||||||||||||||||||||||||||
окружности |
в |
|
|
|
|
|
|
параметрической |
|
|
|
форме |
примет: |
ви |
|||||||||||||||||||||
x = a cos t, y = a sin t . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
дифференциал |
|
|
|
|
дуги |
|
||||||||||||||
dl = a 2 sin 2 t + a 2 cos2 tdt = adt . |
|
|
|
|
|
|
|
|
|
|
|
|
Воспользовавшись |
|
|||||||||||||||||||||
формулами (1) и (8), получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
mx |
= ò0p |
ydl = a 2 ò0p sin tdt = 2a 2 , |
|
|
|||||||||||||||||||||||||||||
|
I x |
= |
|
p |
y 2 dl = a3 |
p sin 2 tdt = |
1 |
pa3 . |
|
|
|||||||||||||||||||||||||
|
ò0 |
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ò0 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||||
6.3. Найти статические моменты относительно осей Ox и Oy дуги окружности r = 2a sin j .
146

Решение. Воспользуемся формулами(2). Поскольку
r 2 + r¢2 = 4a 2 sin 2 j + 4a 2 cos2 j = 2a(0 £ j £ p ) |
(рис. |
3.40.),
то
Рис 3.40
mx |
= 4a 2 ò0p sin 2 jdj = 2a 2 ò0p (1 - cos 2j)dj = 2pa 2 ; |
||||||||||||||||||||||||||
|
my |
|
= 4a 2 ò0p sin j cosjdj = 0 . |
|
|
|
|||||||||||||||||||||
То, что my |
= 0 и следовало ожидать, |
так как дуга окружности |
|||||||||||||||||||||||||
симметрична относительно оси Oy . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
6.4. Найти статические моменты и моменты инерции |
|||||||||||||||||||||||||||
прямоугольника |
со |
сторонамиa |
|
и b |
|
|
|
|
относительно его |
||||||||||||||||||
сторон. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение. Расположим оси координат так, как показано на |
|||||||||||||||||||||||||||
рис. 3.41. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Воспользуемся |
|
|
формулами (3), |
|
(9), |
|
|
|
полагая плотность |
||||||||||||||||||
равной единице. Будем иметь: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
1 |
a |
|
2 |
|
|
1 a |
|
2 |
|
|
|
|
|
1 |
|
|
2 |
|
||||||
|
ma |
= |
|
|
|
y |
|
|
dx = |
|
|
|
b |
|
dx = |
|
|
ab |
|
, |
|||||||
|
2 |
|
|
|
|
|
2 |
|
|||||||||||||||||||
|
|
|
ò0 |
|
|
|
|
2 ò0 |
|
|
|
1 |
|
|
|
|
|
|
|||||||||
|
mb |
= ò0a xydx = ò0a bxdx = |
a 2b , |
|
|
||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
1 a |
|
|
2 |
1 |
|
|
|
|
|
||||||||
|
|
|
|
a |
3 |
|
|
3 |
|
|
|
|
|
|
3 |
|
|||||||||||
|
I a = |
|
|
|
y |
|
|
dx = |
|
|
|
b |
|
dx = |
|
|
|
ab |
|
|
, |
||||||
|
3 |
|
|
|
|
|
|
|
3 |
|
|
||||||||||||||||
|
|
|
|
ò0 |
|
|
|
|
3 ò0 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
Ib |
= ò0a x 2 ydx = ò0a x 2bdx = |
1 |
a3b . |
|
||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|||
147

Рис. 3.41.
6.5. Найти статические моменты и моменты инерции
треугольника, |
ограниченного |
линиями x = 0 , |
y = 0 и |
x + y = a ; а) |
относительно координатных осей; б) |
прямой, |
|
параллельной основанию и проходящий через вершину; ) прямой, параллельной основанию и проходящей через центр тяжести треугольника.
Решение. )а Статический момент и момент инерции треугольника (рис. 3.42) относительно оси Ox находим по формулам (3) и (9)
mx = 12 ò0a y2dx = 12 ò0a (a - x )2 dx =
|
1 |
æ |
2 |
|
2 |
|
x3 |
ö |
a |
a3 |
|
= |
|
ç a |
|
x - ax |
|
+ |
|
÷ |
= |
|
; |
2 |
|
|
3 |
6 |
|||||||
|
è |
|
|
|
|
ø |
0 |
|
|||
|
|
|
|
|
|
||||||
|
|
1 |
a |
3 |
|
|
1 a |
|
|
3 |
|
1 (a - x)4 |
|
a |
|
a 4 |
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
I x |
= |
|
y |
|
dx = |
|
|
|
(a - x) |
dx = - |
|
|
|
|
|
|
|
|
|
= |
|
. |
|||
3 |
|
3 ò0 |
3 |
|
|
4 |
|
|
0 |
12 |
|||||||||||||||
|
|
ò0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
В силу симметрии mx |
= my |
= |
a 4 |
и I x = I y |
= |
|
a 4 |
|
|
|
|
|
|||||||||||||
|
|
|
|
. |
|
|
|
|
|
||||||||||||||||
6 |
|
12 |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
148

Рис. 3.42
б) Обозначим прямую, проходящую через вершину, за l . Через a y обозначим ширину сечения, параллельного оси Ox ,
на расстоянии h |
|
|
от вершины треугольника. Из подобия |
|||||||
треугольников |
a y |
|
= |
|
h |
и ay = h . Отсюда, статический момент |
||||
a |
|
|
a |
|||||||
|
|
|
|
|
|
|
|
|
||
и момент инерции |
|
|
|
|
|
|
|
|||
|
|
ml |
|
= ò0a a y hdh = ò0a h 2 dh = |
|
a 3 |
; |
|||
|
|
|
|
|
||||||
|
|
|
|
|
|
3 |
|
|
||
|
|
Il |
= ò0a a y h 2 dh = ò0a h3dh = |
h 4 |
. |
|||||
|
|
|
||||||||
|
|
|
|
|
|
4 |
|
|
||
в) Центр тяжести треугольника расположен на 1 высоты
3
от основания. Проведем через центр тяжести ось l (рис. 3.43). Обозначим через a y ширину сечения, параллельного оси l , на
расстоянии |
h |
от неё. |
Ширина сечения выше осиl |
равна |
|||
ay = |
2 |
a - h , ниже ay = |
2 |
a + h . |
|
||
|
|
|
|||||
3 |
|
|
|
3 |
|
|
|
Поскольку |
ось l |
|
проходит через центр тяжес, тои |
||||
статический |
момент |
треугольника относительно |
оси равен |
||||
нулю. Действительно, для верхней части треугольника
149

Рис. 3.43
|
|
2 |
|
æ 2 |
ö |
æ |
2 |
|
h |
2 |
|
h |
3 |
ö |
2 |
a |
|
|
a |
3 |
4 |
|
|
|||||||||||
|
|
a |
|
|
|
3 |
|
|
|
|
||||||||||||||||||||||||
â |
3 |
|
ç |
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
ml |
ç |
|
|
|
a |
|
|
- |
|
|
= |
|
|
|
|
|
|
|
|
|
|
, |
||||||||||||
= ò0 |
|
|
3 |
a - h ÷hdh = ç |
3 |
2 |
3 |
÷ |
0 |
27 3 |
|
|||||||||||||||||||||||
|
|
|
|
|
è |
ø |
è |
|
|
ø |
|
|
|
|||||||||||||||||||||
для нижней |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
æ 2 |
ö |
æ |
2 |
|
h |
2 |
|
h |
3 |
|
|
ö |
a |
|
a |
3 |
|
4 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|||||||||||||||||||||
í |
3 |
ç |
|
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
ml |
ç |
|
|
|
a |
|
|
+ |
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
. |
|
|||||||
= ò0 |
3 |
a + h ÷hdh = ç |
3 |
2 |
3 |
÷ |
0 |
|
27 3 |
|
||||||||||||||||||||||||
|
|
|
|
|
è |
ø |
è |
|
|
ø |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При вычислении статических моментов расстояния точек, лежащих по разные стороны от осиl , берутся с разными
знаками, следовательно, m = mâ - mí |
= 0 . |
|
|
|||
|
l |
l |
l |
|
|
|
Момент |
инерции |
|
верхней |
части |
треугольн |
|
относительно оси l |
равен |
|
|
|
|
|
â |
|
|
2 |
a æ 2 |
ö |
2 |
|
|
|
|
|
|
|||||
Il |
= |
3 |
ç |
|
a - h ÷h |
|
dh |
|
3 |
|
|||||||
|
|
ò0 |
è |
ø |
|
|
||
æ |
2 |
|
h |
3 |
|
h |
4 |
ö |
2 |
a |
|
a |
4 |
4 |
|
|||
|
|
|
3 |
|
|
|||||||||||||
ç |
a |
|
|
|
÷ |
|
|
|
|
|
|
|||||||
= ç |
|
|
|
- |
|
|
÷ |
|
|
|
= |
|
|
|
|
. |
||
3 |
3 |
4 |
81 3 |
|||||||||||||||
è |
|
|
ø |
0 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Момент инерции нижней части треугольника
|
|
a |
æ 2 |
ö |
|
æ |
2 |
|
h |
3 |
|
h |
4 |
ö |
|
a |
|
a |
4 |
11 |
|
||
í |
|
2 |
|
|
|
3 |
|
|
|||||||||||||||
3 |
ç |
|
|
|
|
÷ |
|
|
|
|
|
||||||||||||
Il |
= ò0 |
ç |
|
a + h÷h |
|
dh = ç |
|
a |
|
|
+ |
|
|
÷ |
|
|
= |
|
|
|
|
. |
|
3 |
|
3 |
3 |
4 |
0 |
81 12 |
|||||||||||||||||
|
|
|
è |
ø |
|
è |
|
|
ø |
|
|
||||||||||||
Таким образом, момент инерции всего треугольника равен
150