

3.4.2. Дискретно-детерминированные модели
Для их описания используют F–схемы
(finite automata).
Для задания конечного автомата нужно
описать все элементы множества
![]() .
Рассмотрим несколько способов задания
таких автоматов: табличный, графический
и матричный.
.
Рассмотрим несколько способов задания
таких автоматов: табличный, графический
и матричный.
Табличный основан на использовании таблиц переходов и выходов, строки которых соответствуют входным сигналам автомата, а столбцы – его состояниям. На пересечении i-ой строки и k-го столбца таблицы переходов помещают соответствующее значение (zk ,xi) функции переходов, а в таблице выходов – соответствующее значение (zk, xi) функции выходов.
Пример: опишем работу автомата с помощью таблиц переходов.
Данные для автомата Мили:
xi |
zk |
||
z0 |
z1 |
z2 |
|
|
Переходы |
||
x1 |
z2 |
z0 |
z0 |
x2 |
z0 |
z2 |
z1 |
|
Выходы |
||
x1 |
y1 |
y1 |
y2 |
x2 |
y1 |
y2 |
y1 |
Данные для автомата Мура:
xi |
y |
||||
y1 |
y1 |
y3 |
y2 |
y3 |
|
z0 |
z1 |
z2 |
z3 |
z4 |
|
x1 |
z1 |
z4 |
z4 |
z2 |
z2 |
x2 |
z3 |
z1 |
z1 |
z0 |
z0 |
При графическом задании конечного автомата используют понятие направленного графа. Этот граф представляет собой набор вершин, которые соответствуют внутренним состояниям автомата и соединяющие вершины дуги соответствующие входным и выходным переменным. Графы на рис. 3.9. соответствуют данным таблиц.
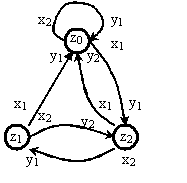
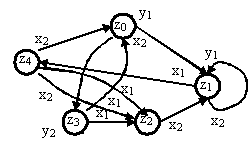
Рис. 3.9 Графы автоматов а) –Мили, b) - Мура.
Матричное представление конечного
автомата: строки матрицы
![]() соответствуют исходным состояниям, а
столбцы - состояниям перехода. Для
рассмотренного нами примера автомата
Мили матрица будет иметь вид:
соответствуют исходным состояниям, а
столбцы - состояниям перехода. Для
рассмотренного нами примера автомата
Мили матрица будет иметь вид:
![]()
Для автомата Мура, элемент cij равен множеству входных сигналов на переходе (zi,zj), а выход описывается вектором выходов:
![]() ,
,
i – ая компонента которого – выходной сигнал, отмечающий состояние zi. Для рассмотренного нами автомата Мура матрица соединений и вектор выходов записываются следующим образом:

F – схемы широко применяются для описания функционирования таких объектов как элементы и узлы ЭВМ, устройства контроля, регулирования и управления, коммутационные устройства (например: телефонные станции).
3.4.3. Вероятностные автоматы
Для построения математических моделей дискретно–стохастических моделей используют схемы вероятностных (стохастических) автоматов P-схемы (probabilistic automat). В общем виде вероятностный автомат можно определить как дискретный потактный преобразователь информации с памятью, работа которого в каждом такте зависит только от состояния памяти и может быть описана только статистически.
Рассмотрим математическую схему для вероятностного автомата. Пусть Ф – множество всевозможных пар вида (zr, yj), где yj-элементы входного подмножества Y. Потребуем, чтобы любой элемент множества G индуцировал на множестве Ф некоторый закон распределения следующего вида:
Элементы из Ф …(z1 y1)(z1 y2)…(zRyJ-1)(zR yJ)
(xi zr) ... b11 b12 ... bR(J-1) bRJ
При этом
![]() ,
где brj
- вероятности перехода автомата
в состояние zr
и появления на выходе сигнала yj,
если он был в состоянии zs
и на его вход в это время поступил сигнал
xi.
Число таких распределений, представленных
в виде таблиц, равно числу элементов
множества G.
Обозначим множество таких таблиц через
B, тогда четвёрка
элементов
,
где brj
- вероятности перехода автомата
в состояние zr
и появления на выходе сигнала yj,
если он был в состоянии zs
и на его вход в это время поступил сигнал
xi.
Число таких распределений, представленных
в виде таблиц, равно числу элементов
множества G.
Обозначим множество таких таблиц через
B, тогда четвёрка
элементов
![]() называется вероятностным автоматом
(P-автоматом).
называется вероятностным автоматом
(P-автоматом).
Пусть элементы множества G индуцируют некоторые законы распределения на подмножествах Y и Z. Это можно представить в виде:

При этом
![]() и
и
![]() ,
где zr
и qj
– вероятности перехода автомата в
состояние zr
и появления выходного сигнала yr,
при условии, что автомат находился в
состоянии zs
и на его вход поступил сигнал xi.
,
где zr
и qj
– вероятности перехода автомата в
состояние zr
и появления выходного сигнала yr,
при условии, что автомат находился в
состоянии zs
и на его вход поступил сигнал xi.
Если для любых r и j имеет место соотношение qrzi=brj, то такой P-автомат называется вероятностным автоматом Мили.
Теперь пусть определение выходного сигнала P-автомата зависит лишь от состояния, в котором находится автомат в данном такте, то есть пусть каждый элемент выходного подмножества Y индуцирует распределение вероятностей выходов, имеющее следующий вид:
![]()
Здесь
![]() ,
где si
– вероятность появления выходного
сигнала yi
при условии, что P-автомат
находился в состоянии zr.
,
где si
– вероятность появления выходного
сигнала yi
при условии, что P-автомат
находился в состоянии zr.
Если для любых r и i имеет место соотношение zrsi=bri, то такой P-автомат называется вероятностным автоматом Мура.
Частным случаем Р-автомата, задаваемого как , являются автоматы, у которых либо переход в другое состояние, либо выходной сигнал определяются детерминировано. Если детерминировано определён выходной сигнал, то такой автомат называют Y-детерминированным вероятностным автоматом. Аналогично, Z-детерминированным вероятностным автоматом называют P-автомат, у которого детерминированным является выбор нового состояния.