

8.3. Сравнительный анализ языков моделирования
Языки имитационного моделирования можно разделить на три группы: непрерывные, дискретные и комбинированные (рис.8.3). В основе классификации
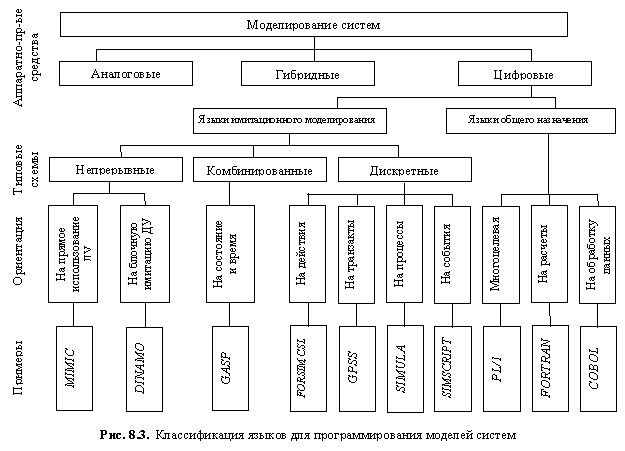 лежит
принцип формирования системного времени.
Системные часы предназначены для
продвижения системного времени в модели
Мm и для
синхронизации различных событий и
операций в модели системы, поэтому при
отнесении языка моделирования к тому
или иному типу нужно считаться с типом
механизма "системных часов".
лежит
принцип формирования системного времени.
Системные часы предназначены для
продвижения системного времени в модели
Мm и для
синхронизации различных событий и
операций в модели системы, поэтому при
отнесении языка моделирования к тому
или иному типу нужно считаться с типом
механизма "системных часов".
Непрерывное представление системы S сводится к составлению уравнений, с помощью которых устанавливается связь между эндогенными и экзогенными переменными модели. Примером непрерывного подхода служит использование ДУ для получения характеристик системы (реализовано в языке MIMIC) или, если экзогенные переменные принимают дискретные значения, уравнения являются разностными (DINAMO).
Представление в виде схемы, где присутствуют непрерывные и дискретные величины, называется комбинированным (GASP, построенный на базе языка FORTRAN).
В рамках дискретного подхода можно выделить несколько групп ЯИМ.
Первая группа подразумевает наличие списка событий, отличающих моменты начала выполнения операций. Продвижение времени осуществляется по событиям, в моменты их наступления производятся необходимые операции (SIMSCRIPT). Команды этого языка группируются так: операции над временными объектами, арифметические и логические операции и команды управления, команды ввода-вывода, специальные команды обработки результатов.
Вторая группа: просмотр действий с целью проверки выполнения условий начала или окончания какого-либо действия производится непрерывно. Языки имеют в основе поисковый алгоритм, и динамика S описывается в терминах действий (FORSIM). Этот язык удобен для описания систем с большим числом ресурсов, так как позволяет записывать условия их доступности в компактной форме.
Третья группа описывает системы, поведение которых определяется процессами (последовательность событий, связь между которыми определяется с помощью набора специальных отношений). Динамика заложена в независимо управляемых программах, они в совокупности составляют программу процесса (SIMULA). Главная роль в этом языке отводится понятию параллельного оперирования с процессами в системном времени.
Четвертая группа - это языки типа GPSS. Язык был разработан профессором Гордоном более 40 лет назад. Динамические объекты в GPSS называются транзактами и представляют собой элементы потока. Они "создаются" и "уничтожаются". Аппарат языка образуют блоки, описывающие логику модели, сообщая транзактам, куда идти и что делать дальше. Данные готовятся в виде пакета управляющих и определяющих карт. Созданная программа, работая в режиме интерпретации, генерирует и передает транзакты из блока в блок в соответствие с правилами, устанавливаемыми блоками. Каждый переход транзакта приписывается к определенному моменту системного времени.
Эффективность языков представлена в виде следующей таблицы (в порядке уменьшения эффективности):
Возможности языка |
Простота |
Предпочтения пользователя |
SIMULA SIMSCRIPT GPSS |
GPSS SIMSCRIPT SIMULA |
SIMSCRIPT GPSS SIMULA |
Следующим уровнем в структуре инструментов, используемых для реализации на ЭВМ имитационных экспериментов являются интерактивные инструментальные интегрированные системы имитационного моделирования.