

пользуются опорные, связующие и другие точки, включенные в фотограмметрическую сеть.
Построение цифровой модели завершается увязкой локальных моделей TIN по их границам и формированием общей модели в границах обработки, созданием регулярной модели DEM, интерполированием горизонталей с заданным шагом и редактированием их поло-
фа местности при изготовлении плана (фотоплана) местностиИостается незыблемым уже около 100 лет и заключается в делении изображения на отдельные участки, называемые зонами трансформирования, в соответствии с их положением по высоте и последующем установлении для каждой такой зоны своего индивидуального масштаба проек-
жения по эпиполярным изображениям.
Цифровую модель рельефа DEM удобнее строить с шагом, соответствующим или (чаще всего) кратным геометрическому разреше-
нию аэроснимка. |
Д |
|
9.9. Ортотрансформирование снимков
Применяемый в фотограмметрии принцип учета влияния релье-
тирования. К |
рельефа в пределах такой зоны не может пре- |
||||
вышать расчетного Q = 2h при заданных масштабе плана M, фокус- |
|||||
ном расстоянии аэрокамеры f, допустимом искажении точек под вли- |
|||||
янием рельефа h на плане и расстоянии rсн от центра снимка до угла |
|||||
рабочей |
, определяемого по формуле |
||||
|
|
А2 fM |
|||
|
|
Q = 2h = |
|
h |
|
|
|
|
. |
||
|
|
1000 r |
|||
|
|
|
|
сн |
|
Разв т е фотограмметрической мысли, совершенствование тех- |
|||||
|
|
олебание |
|
|
|
нолог |
соответствующ х технических средств лишь корректиро- |
||||
вали |
понят е о зонах трансформирования и принципах их формиро- |
||||
Сванияплощади, но не более.
До 1970-х гг. понятие «зона трансформирования» отождествлялось с фрагментами изображения, которым соответствовали участки местности между расчетными горизонталями. Преобразование таких зон выполнялось фотомеханическим способом с помощью фототрансформаторов. Для изменения масштаба проектирования зон использовалась информация о рельефе местности, представленная в виде горизонталей.
35
С 1973 г. с серийным выпуском ортофотопроекторов зону трансформирования стали отождествлять с щелью, через которую фрагменты изображения снимка проектируются на план в масштабе, согласованном с профилем местности. Такое трансформирование, называемое дифференциальным (или ортогональным), требовало наличия ориентированной в плане и по высоте модели местности, стереоскопическое наблюдение которой обеспечивало возможность изменения высоты щели и тем самым получения информации о рельефе местности в конкретной точке.
С середины 1980-х гг. с появлением и массовым внедрением цифровых фотограмметрических систем (ЦФС) зону трансформирования стали отождествлять с фрагментом изображения, трансформируемым как единое целое, – с пикселем или группой пикселей. Размер такого фрагмента может быть установлен так же, как и ширина щели
при дифференциальном трансформировании, однако, учитывая тех- |
||
нические возможности современных ЭВМ, чаще всего он соответ- |
||
|
|
И |
ствует одному пикселю. Такое преобразование изображения, называ- |
||
емое ортотрансформированием, требует наличия цифровой мо- |
||
дели рельефа DEM, со сторонами, параллельными осям X и Y коорди- |
||
натной системы местности. |
Д |
|
|
|
|
|
9.10. Теоретические основы цифрового |
|
|
трансформирования снимков |
|
9.10.1.Назначен е Ао ласти применения цифрового |
||
|
трансформирования снимков |
|
Трансформ рован ем снимков в фотограмметрии называют |
||
|
б |
|
процесс преобразован я сходного снимка объекта в изображение |
||
цифровое |
|
|
С |
|
|
объекта в заданной проекц .
При цифровом трансформировании исходный снимок представ-
ляет собой изображение, получаемое или непосредственно
цифровой съемочной системой, или путем преобразования аналогового снимка в цифровую форму на сканере.
Основными областями применения цифрового трансформирования являются топография и картография.
При создании и обновлении карт различного назначения по аэрокосмическим снимкам создаются трансформированные изображения местности в проекции карты. Эти изображения могут быть со-
36
зданы по одиночным снимкам или по нескольким перекрывающимся снимкам. Цифровое трансформирование выполняется с точностью, соответствующей точности, предъявляемой действующими нормативными документами к точности карт соответствующего масштаба.
Цифровые трансформированные изображения используют для создания контурной части карт путем векторизации цифровых изображений в среде CAD или ГИС, а также как самостоятельные картографические документы. В частном случае, если при трансформировании снимков не учитывается влияние кривизны Земли и проекции карты на положение контуров, трансформированное изображение представляет собой ортогональную проекцию местности на горизонтальную плоскость. Такой вид трансформирования называется орто-
ние используется для создания по исходным снимкамИперспективных изображений местности из заданных точек пространства. Такие изображения используют в военной области, например, в летных тренаже-
фототрансформированием.
Помимо топографии и картографии, цифровое трансформирова-
рах и в архитектуре − при проектировании различных сооружений.
Цифровое трансформирование применяют также для преобразо- |
||||
вания стереопар исходных снимков в стереопару снимков идеального |
||||
случая съемки в системе координат фотограмметрическойД |
модели. |
|||
Такое прео разование выполняется в цифровых стереофотограммет- |
||||
рических системах. |
|
|
||
В настоящем разделе рассматриваются теоретические основы |
||||
ц фрового фототрансформ рования снимков, в частности |
методы |
|||
наблюден я |
|
|
А |
|
|
змерен я ц фровых снимков и методы создания циф- |
|||
ровых трансформ рованных снимков и фотопланов. |
|
|||
9.10.2. |
|
|
измерение цифровых изображений |
|
|
Наблюден |
|
||
Ц фровое |
зображен е хранится в памяти компьютера в общем |
|||
жат информациюоб оптических плотностях или цвете элементарных |
||||
С |
|
|
|
|
случае в виде прямоугольной матрицы, элементы ij которой содер-
участков изображения (пикселей), а номера строки i и столбца j элемента ij определяют его положение в матрице. Нумерация строк и
столбцов матрицы цифрового изображения начинается с нуля.
37

Координаты центров пикселей в |
|
|
|
|
левой прямоугольной системе коорди- |
|
|
|
|
нат цифрового изображения |
ос хс УС |
|
|
|
(рис. 9.16), началом которой является |
|
|
|
|
левый верхний угол цифрового изоб- |
|
И |
||
ражения, определяются в так называе- |
|
|||
|
|
|
||
мых пиксельных координатах (едини- |
|
|
|
|
цей измерения в этом случае является |
|
|
|
|
пиксель). |
|
|
|
|
Пиксельные координаты центров |
|
|
|
|
|
Д |
|
||
пикселей в системе координат цифро- |
Рис 9.16. Система координат |
|||
вого изображения ос хс ус определяют по формулам: |
|
|
||
xp |
= j + 0.5 |
|
|
(9.14) |
|
|
|
|
|
А |
|
|
||
yp |
= i + 0.5 |
|
|
|
Для измерения координат точек цифрового изображения его ви- |
||||
зуализируют на экране дисплея. Если пиксель изображения на экране дисплея соответствует пикселю исходного цифрового изображения, то с помощью «мыши» или клавиатуры компьютера можно навести измерительную марку, формируемую в виде цифрового изображения на
ся матрдиспцей n×n п кселей, числен-
экране |
лея, на точку изо ражения с точностью до одного пикселя. |
|
Для получения подпиксельной (субпиксельной) точности можно |
||
увел ч ть матр цу |
зо ражения на |
|
экране мон тора относ тельно ис- |
||
ходного ц фрового |
зо ражения. В |
|
этом случае каждый п ксель исход- |
||
ного |
зображен я |
ет зображать- |
|
буд |
|
ные значен я всех элементов a'ij которой будут равны численному значению элемента ij матрицы исходно-
го изображения. |
|
|
Пиксельные координаты |
точек |
Рис. 9.17. Субпиксельные |
увеличенного изображения |
можно |
координаты |
измерить с точностью до 1/n пикселя |
|
|
Сисходного изображения (рис. 9.17). |
|
|
38

Пиксельные координаты (в пикселях исходного изображения) элемента a'ij увеличенного изображения определяют по формулам:
xp |
= |
j + |
|
j + 0.5 |
|
|
|
|
|
|
|
|
|||
|
n |
И |
|||||
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
i + 0.5 |
|
(9.15) |
||
yp |
= i + |
|
|
||||
|
n |
|
|
||||
|
|
|
|
|
|
||
в которых i, j − номера строки и столбца элемента матрицы исходно-
го изображения, в котором находится элементДa'ij увеличенного изоб-
ражения: i , j – номера строки и столбца элемента aij подматрицы n×n; n – коэффициент увеличения изображения.
Например, для элемента a 33 (см. рис. 9.17) пиксельные координаты
3 + 0.5 АXp = 1+ = 1.7;
5
= + 3 + 0.5 =
Yp 1 1.7.
5
изображения можно определить по значениям их пиксельных координат, если известны физические размеры стороны пикселя изображения (предполагается, что пиксель имеет форму квадрата).
Значения бфизических координат центров пикселей цифрового
Значения физических координат определяют по формулам:
|
x |
= x |
|
|
|
|
(9.16) |
|
yc |
= yp |
|
Напр мер, коорд |
наты центра пикселя, соответствующего эле- |
||
менту a 33 (см. с. 9.17), |
при величине = 20 мкм будут равны хс |
= 34 мкм |
|
c p
yс = 34 мкм.
В некоторых цифровых системах начало системы координат
цифрового |
ос хс ус выбирают в центре пикселя, располо- |
||
изображения |
|
|
|
женного в верхнем левом углу цифрового изображения. |
|
||
В этом случае значения пиксельных координат вычисляют по |
|||
формулам: |
|
|
|
С |
xp |
= j |
(9.17) |
|
|
||
yp |
= i |
|
|
|
|
||
39
при измерениях с точностью до пикселя и по формулам:
xp |
= ( j − 0.5) + |
|
j + 0.5 |
|
|
|
|
|
|
|
|
||
|
n |
(9.18) |
||||
|
|
i + 0.5 |
|
|
||
yp |
= (i − 0.5) + |
|
И |
|||
|
n |
|
||||
|
|
|
|
|
||
при измерениях с подпиксельной точностью.
Рассмотренный выше метод измерения цифрового изображения с подпиксельной точностью требует его увеличения на экране дисплея компьютера. Однако даже при увеличении цифрового изображения только в два раза на экране дисплея исходный аналоговый снимок изображается с весьма значительным оптическим увеличением. Так, например, снимок, преобразованный на сканере, с размером пикселя
|
|
|
|
|
|
А |
|
14 мкм на экране дисплея с размером зерна 0,28 мм при увеличении |
|||||||
цифрового изображения снимка в 2 раза имеет оптическое увеличение |
|||||||
40 раз. Такое увеличение приводит к значительному ухудшению изоб- |
|||||||
разительных свойств наблюдаемого |
Д |
||||||
изображения и, как |
следствие, к |
||||||
|
|
|
б |
||||
снижению точности наведения из- |
|||||||
мерительной марки на измеряемые |
|||||||
объекты на изо ражении. |
|
|
|||||
С целью о еспечения воз- |
|
||||||
можности |
измерения |
координат |
|
||||
точек |
ц фрового |
зо ражения с |
|
||||
подп ксельной точностью |
ез уве- |
|
|||||
л чен я |
сходного |
|
зо ражения |
|
|||
|
|
||||||
С |
|
|
|
|
Рис.9.18. Центр измерительной |
||
разработан метод змерен я циф- |
|||||||
ровых |
зображен й, |
в |
котором |
марки не совпадает с точкой |
|||
ц фровое |
зображен е сн мка может смещаться относительно непо- |
||||||
дв жной |
змер тельной марки с шагом, в n раз меньшим размера |
||||||
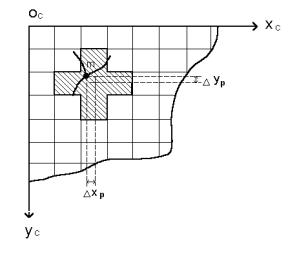
пикселяПринцип. измерения координат точек цифрового изображения по этому методу иллюстрируется на рис. 9.18 и 9.19.
На рис. 9.18 представлен фрагмент исходного цифрового изображения с измерительной маркой и точкой изображения m, координаты которой необходимо измерить.
40
Как следует из рис. 9.18, центр изображения измерительной марки не совпадает с изображением точки m, причем разности значений их пиксельных координат составляют величины x р и y р.
Для совмещения центра изображения измерительной марки с
точкой m можно создать фрагмент цифрового изображения снимка, в |
||||||
|
|
|
|
|
|
И |
котором координаты начала системы координат o с x с y с будут иметь |
||||||
значения |
x = x |
p ; |
y |
= y |
p . |
|
oc |
oc |
|
|
|||
Создание такого фрагмента цифрового изображения производится следующим образом. По координатам центра каждого пикселя
|
|
|
|
|
|
Д |
|
|
|||||
фрагмента изображения x pi, y pi определяют значения координат его |
|||||||||||||
проекции xpi, ypi в системе координат ос хс ус исходного изображения. |
|||||||||||||
|
|
|
|
|
|
Их |
значения определяют по |
||||||
|
|
|
|
|
формулам: |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
xpi = xpi + xpi |
|
||||
|
|
|
А |
|
|
|
|
(9.19) |
|||||
|
|
|
|
|
|
|
|
ypi = ypi + ypi |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Затем по значениям координат |
|||||||
|
|
|
|
|
xpi, ypi находят ближайшие к изоб- |
||||||||
|
|
б |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
ражению точки i, соответствующей |
||||||||
|
|
|
|
|
центру пикселя создаваемого фраг- |
||||||||
|
|
|
|
|
мента цифрового изображения, че- |
||||||||
|
Рис 1 |
|
|
тыре пикселя исходного цифрового |
|||||||||
|
|
K |
M |
K |
|
|
p |
|
|
|
|||
|
|
|
|
|
изо ражения, например, M, K, L, N |
||||||||
|
. 9.19. Центр марки |
|
|
(рис. 9.20). |
|
|
|
|
|
|
|||
|
cовмещён c точкой m |
|
|
|
Далее |
|
методом билинейного |
||||||
|
|
|
|
|
интерполирования определяют зна- |
||||||||
чен я опт ческой плотности i-го пикселя создаваемого фрагмента |
|||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
зображен я по формуле |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Di = D1 |
+ (D2 |
− D1 ) xp , |
|
|
|
(9.20) |
|||||
в которой |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D = D + (D − D ) y |
|
|
|
|
|||||||
|
|
D2 = DL + (DN − DL ) y p |
|
|
|||||||||
|
|
|
|
|
|||||||||
Таким же образом формируются все элементы создаваемого фрагмента цифрового изображения.
На экране дисплея на визуализированном фрагменте созданного цифрового изображения центр измерительной марки будет совмещен с изображением точки m. Пиксельные координаты точки m изображе-
41

ния в системе координат исходного изображения определяются по формулам (9.19).
|
|
|
|
|
|
|
|
|
Необходимо отметить, |
что |
|||||
|
|
|
|
|
|
|
создание |
|
фрагмента |
цифрового |
|||||
|
|
|
|
|
|
|
изображения |
требует |
значитель- |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
И |
|||
|
|
|
|
|
|
|
ных |
вычислительных |
процедур. |
||||||
|
|
|
|
|
|
|
Поэтому для достижения эффекта |
||||||||
|
|
|
|
|
|
|
перемещения |
изображения |
на |
||||||
|
|
|
|
|
|
|
экране |
дисплея |
относительно |
||||||
|
|
|
|
|
|
|
марки в «реальном масштабе» |
||||||||
|
|
|
|
|
|
|
|
Д |
|
|
|||||
|
|
|
|
|
|
|
времени |
фрагмент |
изображения |
||||||
|
|
|
|
|
|
|
не должен иметь большие разме- |
||||||||
|
|
|
|
|
|
|
ры. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В случае если для измере- |
||||||
|
Рис. 9.20. Четыре ближайших |
|
ний используют цветные цифро- |
||||||||||||
|
|
|
|
|
А |
|
|
|
|
|
|
||||
|
пикселя исходного изображения |
|
вые изображения, при формиро- |
||||||||||||
|
|
|
|
|
|
|
вании элементов |
создаваемого |
|||||||
изображения методом билинейного трансформирования по формулам |
|||||||||||||||
(9.20) определяются интенсивности красного R, зеленого G и синего |
|||||||||||||||
|
|
|
изображенияцесса определяются параметры, |
||||||||||||
В компонентов цветного |
|
. |
|
|
|
|
|
|
|
|
|||||
|
|
9.10.3. Внутреннее ориентирование снимка |
|
|
|||||||||||
|
в |
|
|
координат цифрового изображения |
|
|
|||||||||
|
системе |
|
|
снимка Sxyz в системе коорди- |
|||||||||||
|
Для о еспечен я возможности определения координат точек в |
||||||||||||||
с стеме коорд нат сн мка по значению их координат в системе коор- |
|||||||||||||||
д нат ц фрового |
зо ражения |
производится |
процесс |
внутреннего |
|||||||||||
С |
|
|
|
|
ориентирования снимка. В ре- |
||||||||||
|
|
|
|
зультате проведения этого про- |
|||||||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
характеризующие положение и |
||||||||
|
|
|
|
|
|
|
ориентацию системы координат |
||||||||
|
|
|
|
|
|
|
нат |
цифрового |
изображения |
||||||
|
|
|
|
|
|
|
ocxcyc , а также параметры |
си- |
|||||||
|
|
|
|
|
|
|
стематической деформации ис- |
||||||||
|
|
|
|
|
|
|
ходного |
аналогового снимка |
|||||||
|
|
|
|
|
|
|
(рис. 9.21). |
|
|
|
|
||||
|
Рис. 9.21. Системы координат |
|
|
|
|
|
|
|
|
|
|
||||
|
снимка и цифрового изображения |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
42
Для определения параметров внутреннего ориентирования снимка измеряют координаты изображений координатных меток
снимка в системе координат цифрового изображения oс xс yс. |
|
Методика определения параметров внутреннего ориентирования |
|
снимка зависит от методики фотограмметрической калибровки съе- |
|
мочной камеры. |
И |
|
|
Если в результате фотограмметрической калибровки съемочной |
|
камеры были определены координаты координатных меток в системе |
|||||||||||||
координат съемочной камеры (снимка) Sxyz, то для определения ко- |
|||||||||||||
ординат точек в системе координат снимка по значениям их коорди- |
|||||||||||||
|
|
|
|
|
|
|
|
|
Д |
|
|||
нат в системе цифрового изображения используют формулы аффин- |
|||||||||||||
ного преобразования координат: |
|
|
|
|
|
|
|
|
|||||
x |
a0 |
|
xc |
|
a0 |
|
a1 |
a2 |
xc |
(9.21) |
|||
|
= |
|
+ P |
|
= |
|
+ |
|
|
, |
|||
y |
b |
|
y |
|
|
b |
|
b b |
y |
|
|
||
|
0 |
А |
2 |
|
c |
|
|||||||
|
|
c |
|
0 |
|
1 |
|
||||||
которые можно представить в развернутом виде |
|
|
|
||||||||||
б |
|
|
|
|
|
|
|
||||||
|
|
x |
= a0 |
+ a1 xc |
+ a2 yc |
|
|
|
(9.22) |
||||
|
|
y = b + b x |
|
+ b y |
. |
|
|
|
|||||
|
|
|
0 |
|
1 |
c |
2 |
|
c |
|
|
|
|
Формулы (9.21, 9.22) позволяют не только определить положе- |
||||
определения |
|
|
||
ние и ориентацию системы координат снимка в системе координат |
||||
ц фрового |
зо ражен я, но и учесть систематические |
искажения |
||
сн мка, возн кающ е |
|
з-за деформации фотопленки, на которой был |
||
получен сн мок. |
|
|
|
|
Параметры афф нного преобразования ai, bi можно определить |
||||
С |
|
|
|
|
по коорд натам xc, yc |
координатных меток снимка, измеренных на |
|||
ц фровом |
зображен |
|
, значениям координат x,y этих меток в си- |
|
стеме коорд нат сн мка, полученным при калибровке съемочной ка- |
||||
меры. |
|
|
|
|
Для |
|
параметров ai, bi для каждой метки, измерен- |
||
ной на цифровом изображении, составляют уравнения: |
|
|||
|
|
|
a0 + a1 xc + a2 yc − x = x |
(9.23) |
|
|
|
. |
|
|
|
|
b0 +b1 xc + b2 yc − y = y |
|
43
Полученную систему уравнений решают по методу наименьших квадратов и определяют в результате решения значения параметров ai, bi . Для их определения необходимо не менее трех координатных меток, не лежащих на одной прямой.
В практике фотограмметрии возникает задача определения значений координат точек в системе координат цифрового изображения по координатам этих точек, полученным в системе координат снимка.
Такое преобразование координат выполняется по формулам:
x |
|
x − a |
|
|
A |
A |
x − a |
|
|
(9.24) |
|
c |
= P−1 |
0 |
|
= 1 |
2 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
yc |
y − b0 |
|
B1 |
B2 y − b0 |
|
|
||||
или |
|
(x − a0 ) + A2 |
(y − b0 ) |
|
|
xc |
= A1 |
|
(9.25) |
||
|
|
(x − a0 ) + B2 |
. |
|
|
yc |
= B1 |
(y − b0 ) |
И |
||
|
|
|
|
||
|
|
Д |
|
||
В формулах (9.24) и (9.25) Ai, Bi – элементы обратной матрицы Р-1. Значения пиксельных координат точек xp,yp определяют по фор-
мулам:
|
|
калиб |
xc |
|
|
|
||
|
|
|
|
|
|
|||
|
|
|
xp |
= |
|
|
. |
|
|
|
|
|
|
|
(9.26) |
||
|
|
|
yp |
= |
yp |
|
||
|
|
|
|
|
|
|
||
цифрового |
|
|
|
|||||
|
|
|
|
|
||||
В |
случае если |
при |
- |
|
|
|
|
|
ровке съемочной камеры опредеА- |
|
|||||||
лял сь |
кал |
рованные расстоя- |
|
|
|
|
||
н я между коорд натными мет- |
|
|
|
|
||||
С |
|
|
|
|
|
|
|
|
ками lx, |
ly ( |
с. 9.22), для опреде- |
|
|
|
|
||
лен я коорд нат точек в с стеме |
|
|
|
|
||||
коорд нат сн мка по |
змеренным |
|
|
|
|
|||
координатам точек в системе ко- |
|
|
|
|
||||
ординат |
|
|
изображения |
|
|
|
|
|
используют формулы:
44
x = kx |
cos (xc − a0 )+ sin (yc |
− b0 ) |
|
(9.27) |
|||||
y = k |
− sin (x |
|
− a |
)+ cos (y |
|
|
|
||
c |
c |
− b ) |
|
||||||
y |
|
0 |
|
|
0 |
|
|
||
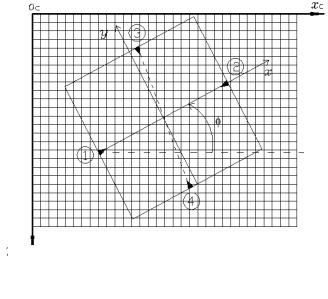
в которых a0, b0 – координаты начала системы координат снимка в системе координат цифрового изображения; − угол разворота оси х
системы координат снимка относительно оси хс системы координат цифрового изображения; kx, ky – коэффициенты деформации снимка по осям x и y.
Если калиброванные расстояния между координатными метками lx, ly не известны, то для определения координат точек в системе координат снимка используют формулы:
|
x = cos (xc |
− a0 ) + sin (yc − b0 ) |
(9.28) |
||||||||||||
|
y = −sin (xc − a0 ) + cos (yc − b0 ) |
||||||||||||||
|
|
||||||||||||||
Значения параметров , a0, b0, kx, ky определяютИпо измеренным |
|||||||||||||||
значениям координат координатных меток в системе координат циф- |
|||||||||||||||
рового изображения системы. |
|
|
|
|
|
|
|||||||||
Значение угла определяют по формуле |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|||
|
|
|
|
= arctg |
yc 2 |
− yc1 |
, |
|
|
(9.29) |
|||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
xc 2 − xc1 |
|
|
|
|||
в которой xc1, yc1 xc2, yc2 – координаты 1-й и 2-й координатных меток |
|||||||||||||||
|
|
|
|
|
|
|
|
А |
|
||||||
в с стеме коорд нат ц фрового изо ражения. |
|
||||||||||||||
Значен я коэфф ц ентов kx, ky определяют по формулам: |
|
||||||||||||||
|
бl |
l |
x |
|
|
|
|||||||||
|
k |
|
= |
x |
= |
|
|
|
|
− yc1 )2 |
|
||||
|
x |
lx |
|
(xc 2 − xc1 )2 + (yc 2 |
|
||||||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
(9.30) |
||||||||
|
|
|
|
ly |
|
|
|
|
|
ly |
|
, |
|||
|
ky |
= |
|
= |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
2 |
|
|
2 |
|
|
||||
и |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
(xc 3 − xc 4 ) + (yc 3 |
− yc 4 ) |
|
||||||||||
С |
|
|
|
ly |
|
|
|
|
|||||||
в которых lx, ly – калиброванные значения расстояний между координатными метками; xci, yci – координаты координатных меток в системе координат цифрового изображения.
45
Параметры a0, b0 определяют, как координаты xc, yc точки пересечения прямых линий, проведенных через координатные метки 1-2 и
3-4, по формулам: |
|
|
|
(yc 4 − yc1 ) + a1 x1 − a2 x4 |
|
|
|
|
|
|
|||||||||||||||||
|
a0 |
= |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
a1 |
|
− a2 |
|
|
|
|
|
|
|
|
|
|
(9.31) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|||||
|
b |
|
= y |
c1 |
+ a |
(a |
0 |
− x |
c1 |
) = y |
c 4 |
+ a |
(a |
0 |
− x |
c 4 |
) |
|
|||||||||
|
0 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
||||||||
в которых |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a1 = |
|
yc 2 |
− yc1 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
xc 2 |
− xc1 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yc 3 − yc 4 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
b1 = |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xc 3 |
− xc 4 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
Д |
|
|||||||||
Для определения координат точек снимка в системе координат |
|||||||||||||||||||||||||||
цифрового изображения по координатам этих точек в системе коор- |
|||||||||||||||||||||||||||
динат снимка используют формулы: |
|
|
|
|
|
|
|
И |
|||||||||||||||||||
|
x |
|
= a |
|
+ |
|
1 |
|
(cos x − sin y) |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
c |
|
|
|
|
0 |
|
|
kx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(9.32) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
y |
|
|
= b |
+ |
|
|
|
(sin x + cos y) |
|
|
|
|
|
|||||||||||||
|
|
|
|
ky |
|
|
|
|
|
|
|||||||||||||||||
|
|
c |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
цифровогоизображения левая, в формулах (9.27) – (9.33) координата |
|||||||||||||||||||||||||||
в случае если кали рованные расстояния lx, ly |
между координатными |
||||||||||||||||||||||||||
метками звестны, формулыА: |
|
|
|
|
|
|
|||||||||||||||||||||
С |
xc |
= a0 + cos x − sin y |
|
|
|
|
|
|
(9.33) |
||||||||||||||||||
|
y |
= b + sin x + cos y |
|
|
|
|
|
|
|||||||||||||||||||
|
бc 0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
в случае если кал брованные расстояния lx, ly неизвестны. Необходимо заметить, что в связи с тем, что система координат
yc берется с обратным знаком.
Определение пиксельных координат точек изображения производят по формулам (6.26).
46