

продолжением главной оптической оси объектива, а оси Sx и Sy параллельны осям снимка ox и oy (при аналоговой аэросъемке) или соответствуют ориентации светочувствительных датчиков изображения. Определение пространственной ориентации этой системы и является
задачей блока инерциальных измерений. |
И |
|
|
Система координат блока инерциальных измерений (на рис. 10.1 |
|
не показана) используется для выполнения инерциальных измерений, |
|
и ее пространственное положение определяет направления осей чувствительности гироскопов и акселерометров. Взаимное положение этой системы относительно «целевой» в виде смещений вдоль координатных осей и трех углов наклона определяют в процессе выставки инерциальных приборов и уточняют по результатам обработки данных, полученных на специальном полигоне. «Целевой» считается система координат аэроснимка Sxyz, бортовая система координат OБXБYБZБ или какая-либо иная, определение ориентации которой является задачей инерциальной системы.
Инерциальная система координат OXИYИZИ (см. рис. 10.1) представляет собой геоцентрическую систему координат OXYZ, зафиксированную на момент включения навигационной системы в рабочий
режим и не участвующую в суточном вращении Земли. |
|||||
|
|
|
|
Д |
|
10.2. Инерциальные навигационные системы |
|||||
Принципы аналитического и геометрического решения задачи |
|||||
инерциальной |
|
навигации |
ыли сформулированы Р. Вуссовом |
||
(1905 г.), М. Керри (1903 гАлексеевым.) и В.В. |
(1911 г.), которые и |
||||
получ ли соответствующ е патенты; началом ее практической реали- |
|||||
зац сч таетcя |
|
системы управления немецкой баллисти- |
|||
ческой ракетой ФАУ-2. Однако создание работоспособных алгорит- |
|||||
мов обработки |
разработка |
|
|
||
|
нформац |
в системах инерциальной навигации по- |
|||
требовало больш х ус л й целых научных коллективов математиков |
|||||
и механиков |
|
, США и некоторых стран Западной Европы. |
|||
|
науки техники привело к разработке достаточно точ- |
||||
Развитие |
|
|
|
||
ных и эффективных инерциальных приборов и систем, способных |
|||||
решать самые разнообразные задачи, связанные с обеспечением поле- |
|||||
Стов самолетов и космических кораблей, перемещением автомобилей и морских судов. Причем в целом ряде случаев (например, при навигации подводных лодок, работах под землей и пр.) никакие иные навигационные средства не могут быть применимы в принципе.
66
С появлением во второй половине прошлого столетия систем глобального позиционирования некоторые специалисты полагали, что методы инерциальной навигации исчерпали свои возможности и завершили свое развитие, передав эстафету спутниковым навигационным системам. Жизнь, однако, показала, что это не так.
10.2.1. Общие принципы инерциальной навигацииИ
Инерциальная навигация базируется на использовании достаточно простых положений, заключающихся в том, что ускорение движения объектаwi, как и его скоростьVi, характеризуются величинами и направлением, т.е. являются векторными переменными. Поэтому если в процессе движения объекта непрерывно выполнять измерение мгновенных ускорений вдоль координатных осей wX, wY, wZ, то их сумма даст скорости перемещения вдоль тех же осей VX, VY, VZ, а сумма мгновенных скоростей – координаты объекта X, Y, Z на момент времени t.
Заменив суммирование дискретных величин интегрированием, получим математическую модель навигации в виде
|
|
0 |
|
t |
|
|
|
t |
|
|
t |
t |
|
|
|
|
|
|
б |
|
|
|
|
|
|
||
|
VX |
= VX |
+ wX i dt, |
X = X 0 |
+ VX i dt = X 0 |
+ wX i dtdt, |
|||||||
|
|
0 |
|
0 |
|
|
0 |
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
Д |
||||||
|
|
|
|
t |
|
|
t |
|
t |
t |
|
|
|
|
VY |
= VY |
+ wYi |
dt, |
Y = Y0 |
+ VYi dt = Y0 + wYi dtdt, |
(10.1) |
||||||
|
|
|
|
t |
|
|
|
t |
|
|
t |
t |
|
|
|
|
|
0 |
|
|
0 |
|
0 |
0 |
|
|
|
|
координатные |
|
|
|
|
|
|
|
|||||
|
VZ |
= VZ |
+ wZi |
|
Z = Z0 |
+ VZi dt = Z0 |
+ wZi dtdt |
|
|||||
|
dt, |
|
|||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
0 |
0 |
|
|
где верхн й |
ндекс «0» о означаетАзначение соответствующего пара- |
||||||||||||
метра (коорд |
|
нат о ъекта |
скорости) в начале измерений (t = 0). |
||||||||||
|
Так м о разом, при |
звестных начальных условиях (скорости и |
|||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
||
положен я в пространстве) можно автономно и без привлечения до- |
|||||||||||||
полн тельной |
|
нформац |
определить пространственное положение |
||||||||||
дв жущегося |
|
бъекта. Для этого на его борту достаточно поместить |
|||||||||||
прибор, позволяющий измерять проекции возникающих ускорений |
|||||||||||||
на |
|
|
|
|
оси некоторой системы координат. Такой прибор, |
||||||||
называемый а к с е л е р о м е т р о м (лат. accelero – |
ускоряю), должен |
||||||||||||
иметь три оси чувствительности, ориентированные параллельно координатным осям X, Y, Z некоторой неподвижной (инерциальной) системы.
Изменение направления движения регистрируется с помощью г и р о с к о п о в, ориентированных по координатным осям и обеспечи-
67

вающих акселерометры данными об ориентации координатных осей инерциальной системы координат.
В общем случае показания акселерометра искажаются из-за влияния гравитационного поля Земли, для компенсации которого необходимо вычесть из измеренного значения ускорение свободного падения g. Поэтому для корректной обработки используется вычислительный блок с обратной связью (рис. 10.2), в котором решается уравнение движения, описываемое вторым законом Ньютона [9]:
где – измеренное акселерометром кажущееся ускорение; r – вектор центра тяжести измерительного блока M; F – сила притяжения единицы массы измерительного блока (ускорение тяготения).
|
|
|
d 2 |
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
) , |
(10.2) |
||
|
|
|
|
|
|
|
|
||||
|
|
= |
|
M |
− F ( |
r |
|||||
|
|
|
|||||||||
|
|
|
dt2 |
|
|
|
M |
И |
|||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Кажущееся |
|
Интегрирова- |
Скорость |
|
Повторное |
Координаты |
||||
|
ускорение |
|
ние |
|
|
интегриро- |
|||||
|
|
|
|
|
|
||||||
|
|
|
уравнения |
|
|
вание урав- |
|
||||
|
|
|
движения |
|
|
|
|
нения |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Ускорение |
|
|
|
|
|
Д |
||||
|
|
|
|
Модель |
|
||||||
|
|
силы |
|
|
|
|
|||||
|
тяжести g |
|
|
гравитацион- |
|
|
|
|
|||
|
|
|
ного поля |
|
|
|
|
||||
|
|
|
|
||||||||
|
Рис. 10.2. Модель вычислительной обработки данных |
||||||||||
С |
|
|
|
А |
и ее вычислительный |
||||||
учетом этого нерциальная система |
|||||||||||
блок (см. р с. 10.2) должны последовательно выполнить: |
|||||||||||
• змерен е акселерометром кажущегося ускорения, в которое |
|||||||||||
полностью ли частбчно входит ускорение свободного падения g; |
|||||||||||
• нтегр рован е функции (10.2), определение скорости дви- |
|||||||||||
жен я |
коорд нат объекта в инерциальной системе координат со- |
||||||||||
определение• ускорения свободного падения g по текущим ко- |
|||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
гласно формулам (10.1);
ординатам и на основе известной модели гравитационного поля;
• вычитание найденного ускорения g из измеренного значения и уточнение параметров движения вторым приближением.
На выходе системы получаются координаты центра тяжести измерительного блока в инерциальной системе координат, скорость перемещения объекта и его ускорение.
68
В первых инерциальных системах для исключения влияния гравитации на сигнал акселерометра ось его чувствительности размещали в горизонтальной плоскости, для чего использовалась с т а б и л и - з и р о в а н н а я п л а т ф о р м а, которая с помощью карданного подвеса изолировалась от поворотов подвижного объекта, что и обеспечивало стабильность ориентации акселерометров относительно Земли.
В настоящее время используются преимущественно б е с п л а т - |
||
ф о р м е н н ы е с и с т е м ы навигации, |
в которых учет влияния накло- |
|
нов платформы на показания гироскопов и акселерометров, а также |
||
интегрирование уравнения движения (10.2), определение ускорения, |
||
|
|
Д |
скорости движения, координат объекта и мгновенных углов ориента- |
||
ции платформы выполняются с помощью бортового компьютера. |
||
10.2.2. Базовые элементы инерциальных |
||
|
навигационных приборов |
|
|
А |
|
Основой инерциальной навигационной системыИявляются уста- |
||
новленные на платформу тройки акселерометров и гироскопов, оси |
||
чувствительности которых ориентированы по координатным осям це- |
||
|
б |
|
левой системы координат. Рассмотрим конструктивные особенности |
||
этих приборов. |
|
|
Акселерометр (от лат. аccelero |
– ускоряю и греч. μετρεσ – |
|
измеряю) предназначен для измерения возникающих на движущихся |
|||
|
механическом |
||
объектах ускорений (перегрузок), которые необходимы для счисления |
|||
пути. |
|
|
|
|
Акселерометры разл чаются: |
||
|
• по в ду |
сследуемого движения (датчик линейный или угло- |
|
вой скорости, ускорен я др.); |
|||
С |
|
||
|
• |
по пр нц пу действия (механический акселерометр, электро- |
|
механ |
й |
др.). |
|
|
• по назначен ю (для измерений ускорения и определения ско- |
||
рости и ускорения, определения местоположения и др.). |
|||
|
В |
|
акселерометре с одной осью чувствительности |
ускорение воспринимается маятниковым устройством, отклонение которого от положения равновесия фиксируется с помощью стрелкиуказателя, потенциометра и пр. В электромеханическом акселерометре ускорение воспринимается специальным датчиком, изменяющим свой параметр (сопротивление, емкость и пр.) пропорционально воздействию внешней силы, и фиксируется, например, на осциллографе.
69
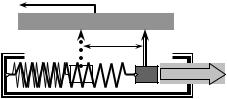
Простейший механический маятниковый акселерометр (рис. 10.3) представляет собой инерционную массу m (например, грузик), которая через упругую пружину связана с корпусом прибора. Под воздействием ускорения масса m перемещается вдоль оси чув-
ствительности l1l2 |
и сжимает (растягивает) пружину. |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
Величина смещения инерционной |
|
|
U |
|
|
|
|
|
|
|
|
массы регистрируется датчиком переме- |
|
|
|
потенциометр |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
щения (потенциометром), |
вырабатыва- |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
ющим сигнал U, величина напряжения |
|
l1 |
|
|
m |
|
22 |
m |
ускорение |
||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
которого пропорциональна этому смеще- |
||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
нию (связь показаний потенциометра и |
|
Рис. 10.3. Схема маятникового |
силой натяжения пружины устанавлива- |
||||||||||
|
|
акселерометра |
|||||||||
|
|
ется при изготовлении и |
тарировании |
||||||||
|
|
|
|
|
|
|
|
|
|
||
прибора). Усиленный сигнал используется для выработки противо-
ходное положение. Тем самым осуществляется мгновенная реакция акселерометра на возникающие ускорения путем измерения и реги-
действующей силы пружины, что позволяет возвратить грузик в ис- |
|
А |
И |
страции данных. На основе этой информации определяется мгновен- |
|||
ное ускорение, скорость перемещения объекта и его мгновенное про- |
|||
|
|
|
б |
странственное положение. |
|||
|
|
Акселерометры характеризуютсяДстабильностью масштабного |
|
коэффициента (нелинейностью), чувствительностью и диапазоном |
|||
измерений, причем два первых параметра определяют точность рабо- |
|||
|
системы |
||
ты |
|
в целом, класс при ора и возможности его использования |
|
для решен я конкретных задач. |
|||
|
|
Точность показан й акселерометра определяется погрешностя- |
|
ми |
змерен я ускорен я , следовательно, зависит от точности реги- |
||
С |
|
||
страц |
смещен й чувств тельной массы, сил трения, параметров |
||
жесткости пруж ны (для механических приборов) и пр.
Уменьшен е погрешностей измерений достигается снижением трен я в элементах конструкции акселерометра. С этой целью инерционную массу m акселерометра (см. рис. 10.3) помещают на бесконтактном подвесе в электрическое или магнитное поле, вакуум или в жидкость с большим удельным весом (для уравновешивания массы m гидростатическими силами) и пр. Точность измерения ускорения современными акселерометрами сопоставима с точностью полевых гравиметров и достигает 0,1 мГал (10−7g).
Гироскоп (греч. γυρο – вращение и σκοπεω – смотрю, наблюдаю) используется в инерциальной навигации для воспроизведения систе-
70
мы отсчёта путем определения углов поворота и наклона платформы. Прибор был предложен в 1852 г. французским ученым Леоном Фуко для демонстрации вращения Земли вокруг своей оси. Обычно он
представляет собой вращающийся маховик, помещенный в кардано- |
|
вый подвес, поэтому долгое время слово «гироскоп» использовалось |
|
|
И |
для обозначения быстро закрученного вращающегося симметричного |
|
твердого тела. |
|
Простейшим, с детства знакомым гироскопом является волчок, стремящийся сохранить направление своей оси в пространстве. Такой гироскоп называется позиционным и используется для стабилизации положения платформы (или аэрокамеры).
В инерциальной навигации находят применение гироскопыдатчики угловой скорости (ДУСы), у которых, в отличие от позиционных гироскопов, ось вращения зажата, и при повороте платформы возникает кориолисова сила, величина которой пропорциональна угловой скорости; ее интегрирование по времени позволяет вычислить
• поплавковые с погруженнымиАв жидкость элементами и ротором, вращающ мся на воздушной подушке в аэродинамических под- ш пн ках при практ чески полном отсутствии трения;
угол наклона соответствующей координатной оси[32].
Области применения гироскопов достаточно разнообразны, поскольку с их помощью можно определять угловые отклонения от заданного направления и угловые скорости перемещения, стабилизиро-
вать положение |
пространстве и пр. |
|
Д |
В настоящее время создан ряд конструкций гироскопов, в част- |
|
ности [32,38]: |
|
• кольцевые лазерные гироскопы (RLG – Ring Laser Gyroscope), в которых угол отклонения оси чувствительности опреде-
С• микромеханические, построенные по технологии MEMS (Micro Electro Mechanical Systems) или iMEMS (интегральные MEMS) и
ляется на основе эффекта интерференции встречных волн, распро- |
|
|
объектов |
страняющ хся по замкнутому кругу; |
|
• волоконно-опт ческ е (FOG – Fiber-Optic Gyroscope), исполь- |
|
зующие |
эффект распространения встречных волн в мно- |
говитковойаналогичныйкатушке оптического волновода, частью которого является |
|
свернутое в спираль оптическое волокно; |
|
представляющие собой выполненную на одном кристалле кремния интегральную микросхему малого размера и веса (рис. 10.4). Низкая стоимость и малые размеры таких гироскопов открывают возмож-
71
ность их широкого применения в автомобилях, телескопах, персональных компьютерах, мобильных робототехнических устройствах, детских игрушках и пр.
|
Погрешности работы гироскопа |
||
|
характеризуются стабильностью мас- |
||
|
штабного коэффициента, измеряемой в |
||
|
процентах, и дрейфом (скоростью ухо- |
||
|
да его оси от первоначального положе- |
||
|
ния), измеряемым в градусах в час ( /ч). |
||
|
Численные значения этих показа- |
||
Рис. 10.4. Микромеханический |
телей определяются особенностями кон- |
||
струкции гироскопа и составляют [38]: |
|||
гироскоп Silicon Sensing Systems |
|||
|
− стабильность |
масштабного |
|
коэффициента: от 10 – 100% у кварцевых, кремниевых и микромеха- |
|||
|
А |
И |
|
нических гироскопов до 10-4 |
– 10-5% у волоконно-оптических и лазер- |
||
ных гироскопов; |
|
|
|
− дрейф: от 1 – 100 /ч у механических и микромеханических гироскопов до 10-3 – 10-5 у электростатических, поплавковых и коль-
цевых лазерных гироскопов. |
|
способ |
|
Значительные погрешности работы гироскопов требуют коррек- |
|
ции их показаний, |
выполненияДи периодичность которой |
определяется величинами погрешностей измерений. В последние го- |
|
ды для этой цели используют спутниковые системы GPS и ГЛО- |
|
подвижном |
|
НАСС, что о ъясняет повышенный интерес к и н т е г р и р о в а н н ы м |
|
навигац онным с стемам, о ъединяющим инерциальные и спутнико- |
|
вые змерен я. |
|
10.2.3. Инерц альные измерительные блоки |
|
С |
|
При промышленном зготовлении инерциальных приборов аксе- |
|
лерометры г роскопы объединяются в один блок, который устанав- |
|
ливается на |
объекте (самолете, автомобиле, беспилотном |
летательном аппарате |
др.) и жестко скрепляется с его основанием |
так, чтобы любые перемещения и изменения пространственной ориентации транспортного средства были зафиксированы измерительным блоком.
Измерительный блок представляет собой бесплатформенную инерциальную систему, объединяющую две тройки ориентированных по координатным осям измерительных приборов (акселерометров и гироскопов), и называется IMU (Inertial Measurement Unit, инерциальное
72
измерительное устройство) или INS (Inertial Navigation System, инерциальная навигационная система, ИНС). Сбор измерительных данных выполняется через стандартные последовательные (СОМ) порты или разъемы (RS-232, RS-422 и др.). Аналогичные по назначению приборы российских компаний ориентированы преимущественно на использование их для управления беспилотными летательными аппаратами, навигационное обслуживание автомобильного транспорта и иные сходные по характеру задачи, и потому здесь не рассматриваются.
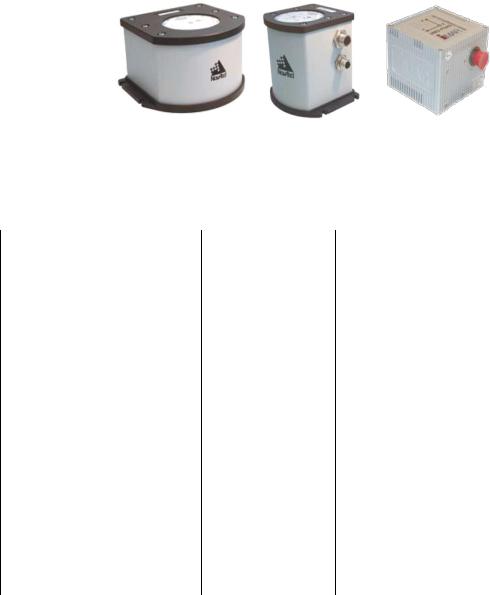
Наиболее известными компаниями, поставляющими инерциальные измерительные блоки для геодезических измерений, являются
Honeywell (США), Northrop Grumman (США), iMAR (Германия) и др.
Их технические характеристики даны в табл. 10.1, а внешний вид – на
рис. 10.5. |
|
|
|
|
|
И |
||||
|
|
|
|
|
|
|
|
|||
|
|
|
a |
|
б |
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Д |
||||
|
|
|
Рис. 10.5. Блоки инерциальных измерений: |
|
|
|||||
|
|
|
а –HG1700, – LH200, в – MAR-FSAS |
|
|
|||||
|
|
|
|
|
|
|
|
|
Таблица 10.1 |
|
|
|
Параметр |
HG1700 (Honey- |
|
LH200 (Northrop |
FSAS (iMAR, |
|
|||
|
|
well, |
) |
|
Grumman, США) |
Германия) |
|
|||
|
|
|
|
|
|
|||||
|
|
|
|
США |
|
|
|
|||
|
Акселерометры: |
|
Кварцевые |
|
Кремниевые |
Серво |
|
|||
|
т п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
дрейф, мГал |
|
Нет данных |
0,3 |
|
1,0 |
|
|||
|
|
б |
|
|
|
|
||||
|
Г роскоп: |
|
КЛГ (RLG) |
|
ВОГ (FOG) |
ВОГ (FOG) |
|
|||
|
т п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
дрейф, /ч |
|
1 – 5 |
|
|
1 – 10 |
|
0,75 |
|
|
|
масштаб, ppm |
|
150 |
|
100 |
|
300 |
|
||
|
|
и |
|
|
|
|
|
|
|
|
|
ошибка измерения |
47 / 112 |
|
36 / 90 |
|
54 / 147 |
|
|||
|
наклона / курса, |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
|
Периодичность |
измере- |
100 |
|
200 |
|
200 |
|
||
|
ний, Гц |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Наработка на отказ, ч |
2000 |
|
20 000 |
|
35 000 |
|
|||
С |
|
|
|
|
|
|
|
|
||
|
Габариты, мм |
|
193 167 100 |
|
157 135 140 |
128 128 104 |
|
|||
|
|
|
|
|
|
|
|
|
||
|
Масса, кг |
|
3,4 |
|
3,0 |
|
2,1 |
|
||
|
|
|
|
|
|
|
|
|
|
|