

Глава 12. СИСТЕМЫ НАЗЕМНОГО МОБИЛЬНОГО ЛАЗЕРНОГО СКАНИРОВАНИЯ
12.1. Особенности и преимущества наземных мобильных систем
Используемое на западе название «системы мобильного карто-
графирования» СМК является дословным переводом англоязычного термина «mobile mapping systems». Иногда в западной литературе используется термин «mobile mapper». Его можно не вполне корректно
онно-измерительные и вычислительныеДсредства, самодвижущуюся платформу, а также совокупность программных и методических средств, предназначенных для выполнения топографической съемки земной поверхности.
перевести как «мобильный картограф». И в том, и в другом случаях
используемые названия нельзя признать удачными, по крайней мере, они никак не вписываются в отечественную традицию, которая уже на уровне терминологическом четко разграничивает работы по топо-
графо-геодезической съемке и по составлению карт. В нашем россий- |
|
ском понимании это, безусловно, связанные, но ни в коем случае не |
|
тождественные виды деятельности. |
И |
|
|
Российские специалисты рассматривают СМК как сложный то- |
|
пографо-геодезический инструмент, включающий в себя информаци- |
|
Главной отличительнойАчертой СМК как средства топографической съемки является нал чие в ее составе сканирующего лазерного дальномера (лазерного сканера), а также возможность работы в дина-
Синструментаистемыданной съёмки, в принципе это название можно отнести как к наземному, так и к воздушному лазерному сканированию.
м ческом реж ме, то есть в процессе движения платформы. Послед- |
|
нее обстоятельство существенным образом отличает методологию |
|
выполнен я съемки СМК от съемки с использованием традиционных |
|
|
б |
наземных лазерных сканеров в статическом положении. По этой при- |
|
ч не в Росс |
существует ещё одно название – мобильные сканиру- |
ющие с |
(МСС), которое подчёркивает динамический характер |
оздание наземных мобильных сканирующих систем является дальнейшим развитием технологии наземного лазерного сканирования за счёт фактической модернизации и внедрения основных элементов технологии воздушного лазерного сканирования (ВЛС), направленными на увеличение производительности, повышение каче-
149
ства и комфортности проведения полевых и камеральных работ. В качестве движущейся платформы здесь используются наземные средства передвижения: автомобили, железнодорожные дрезины и локомотивы, речные и морские суда, причем в современных моделях рабочая скорость движения платформы достигает магистральной скоро-
•GPS − траектории движения платформы; И
•Position and Orientation SystemД(POS) − угловой ориентации платформы;
•LIDAR − дальномерных лазерных измерений.А
обработку. б
и1. Бортовой GPS-приемник регистрирует траекторию движения автомобиля. GPS-данные подвергаются дифференциальной коррек- ц на основе данных неподвижной азовой GPS-станции. Спутниковые данные о новляются с частотой 2−20 Гц.
2. Инерц альная с стема о еспечивает измерение и регистра- Сц ю параметров угловой ор ентации платформы. Инерциальные данные обновляются с частотой от 200 до 500 Гц, т.е. значительно чаще,
чем спутн ковые, но меют дрейф.
3. Лазерные мпульсы отражаются от поверхности земли, зданий, объектов инфраструктуры и др., регистрируются приемником излучения преобразуются в цифровую форму.
4.Продольная развертка осуществляется за счет движения платформы.
5.Каждый из сканеров реализует развертку и при отсутствии препятствий обеспечивает получение съемочных данных в радиусе,
который доступен для данной модели, например до 100 м (модель VI00), до 200 м (модель V200) или 300 м для системы
StreetMapper 360.
150
Оновл. |
|
500 Гц |
Обновление 20 Гц |
|
И |
Рис. 12.1. Схема получения исходных данных, их обновления и обработки |
|
|
Д |
Для того что ы о ъединить отдельные «облака точек», полу- |
|
ченные в движении, в единое «о лако точек» в заданной системе ко- |
|
ординат, например в WGS-84, наземные лазерные сканеры объедине- |
|
ны с нтегральным нав гационнымАкомплексом GPS/IMU, включаю- |
|
щ м спутн ковый нав гац онный приемник GPS и инерциальную |
|
с стему [3]. Такой комплекс позволяет определять положение и ори- |
|
ентац ю моб льной платформы, на которой устанавливается назем- |
|
|
б |
гироскопов |
|
С |
|
ный лазерный сканер, геоцентрической системе координат WGS-84.
Пр нц п альную схему согласования данных инерциальной и спутниковой навигационной систем и процесс исключения влияния
дрейфа акселерометров блока IMU можно показать на
примере коррекции траектории, спроектированной на координатную плоскость OXZ (рис. 12. 2):
• в точках A, B, C, D, E и F, где выполнены спутниковые и инерциальные измерения, реальная траектория (3) совпадает с траекториями, вычисленными по данным инерциальных (1) и спутниковых (2), что обусловлено «сбросом» влияния накопленного к этому моменту дрейфа акселерометров и гироскопов;
151

Z |
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
B′ |
|
D′ |
|
|
|
|
|
|
E |
F′ |
O |
|
|
|
|
И |
|
|
|
|
|
|
АД |
|
|
(1) |
– точки UMI-измерений и восстановленная по ним траектория; |
||||
|
рия |
|
|
|
|
|
екции |
|
|
|
|
|
|
все более |
|
|
|
|
|
|
получены |
|
|
|
|
|
|
инерциальных и спутниковых измерений: |
|
|||||
|
|
|
б |
|
||
|
1) точки B′, C′, D′, F′ фрагментов (1) совмещаются с точками |
|||||
|
измерений |
|
|
|||
спутниковых |
|
|
B, C, D, F; |
|
||
|
2) фрагменты (1) траектории AB′, BC′, CD′ и DF′ разворачива- |
|||||
ются вокруг начальных точек A, B, C, D, в результате чего преобразу- |
||||||
ются во фрагменты траектории AB, BC, CD и DF (4) соответственно, и |
||||||
оказываются в непосредственной близости от фактической траекто- |
||||||
С |
|
|
|
|
||
р . |
|
|
|
|
|
|
|
Пр веденная |
нтерпретация несколько условна, но она отража- |
||||
ет пр нц п согласован я результатов инерциальных и спутниковых данных, дает ключ к пониманию причин относительно невысокой их точности в реальном режиме и объясняет необходимость постобработки.
Данные лазерного сканирования, полученные с помощью МСС, представляют собой «облака точек» с определенным количеством одиночных лазерных измерений. Каждое одиночное лазерное измерение имеет собственную временную метку в формате UTC или GPS-времени. Для синхронизации данных сканирования использу-
152

ются данные спутникового приемника GPS, а для коррекции мгновенных изменений положения мобильной платформы − данные инерциальной системы.
Очевидно, что технология в плане конструктивных решений имеет много общего с методом воздушного лазерного сканирования (рис. 12.3). С чисто математической точки зрения в СМК используется абсолютно аналогичный принцип измерения, что и в других приборах, относящихся к категории «лазерные сканеры», или другое
название «лазерные локаторы» или «лидары». Обратимся к рис. 12.3. |
||||
|
|
И |
||
|
Д |
|
|
|
|
NP, EP, AP |
|||
|
|
|||
Рис. 12.3. Системы координат о ъекта ONEA и сканерного блока OXYZ |
||||
|
А |
|
|
|
Векторные пространства, разованные системой координат СК |
||||
ONEA сканерного лока СК OXYZ, обозначим соответственно через |
||||
G S. Положен |
точки в указанных пространствах будем ха- |
|||
рактер зовать векторамилюбойg и s. |
|
|
|
|
Переход |
з одной трёхмерной СК в другую осуществляется на |
|||
основе матр цы третьего порядка АGS и вектора, определяющего |
||||
начало одной |
К другой СК. Матрица АGS может быть определена |
|||
черезвеличинынаправляющих косинусов, т. е. через разложения орт |
||||
С |
|
|
|
|
К сканера OXYZ по базису обобщённой СК ONEA, определяемые по известным формулам аналитической геометрии по трём углам ориентирования:
153

|
N X |
NY |
N Z |
|
|
|
AGS |
|
|
EY |
|
|
( 12.1) |
EX |
EZ |
|||||
|
|
AX |
AY |
|
|
|
|
|
AZ |
|
|||
На основании уравнения (12.2) выполняется расчет всех координат лазерных точек:
|
|
|
N |
P |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
EP |
|
|
b |
A |
s.sin( ) |
|
b |
|
|
|||||||||
|
|
|
|
A |
|
|
|
= |
|
GA + |
|
GS ( |
s.cos( ) − |
|
SA ), |
(12.2) |
|||||
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где bGA − вектор в пространстве G , координаты которого определя- |
|||||||||||||||||||||
ются непосредственно GPS-измерениями. |
|
|
|
|
|
||||||||||||||||
|
Вектор s |
|
на рис. 12.3 соответствует зондирующему лучу, а его |
||||||||||||||||||
длина s соответствует измеренному значению наклонной дальности. |
|||||||||||||||||||||
Текущее положение |
|
определяется параметром – фазой сканирова- |
|||||||||||||||||||
ния. В формуле (12.2) |
xS = 0; |
|
|
|
|
|
|
|
И |
||||||||||||
yS = s sin( ); zS = s cos( ). |
|
||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||
|
Здесь через bSA |
обозначен вектор в СК сканера, определяющий |
|||||||||||||||||||
местоположение антенны. Этот чрезвычайно важный в метрологиче- |
|||||||||||||||||||||
ском отношении вектор имеет двойное значение: |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
||||
|
• с его помощью можно полностью записать уравнение связи |
||||||||||||||||||||
для сканерного |
|
лока и, следовательно, корректно интерпретировать |
|||||||||||||||||||
результаты сканирования в процессе постобработки; |
|
||||||||||||||||||||
|
• точное знание вектора bSA |
является абсолютно необходимым |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
||||
услов ем корректной ра оты навигационного компьютера по интегри- |
|||||||||||||||||||||
рован ю GPS IMU данных для получения навигационного решения. |
|||||||||||||||||||||
|
Наземная |
|
|
|
|
|
льная система |
имеет существенно более низкую |
|||||||||||||
сто мость по сравнен ю с воздушной за счет использования различ- |
|||||||||||||||||||||
|
|
|
моб |
|
|
|
|
|
|
||||||||||||
|
дорогостоящих |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ных т пов наземных лазерных сканеров, которые на порядок дешевле |
|||||||||||||||||||||
воздушных лазерных скан рующих систем. Кроме того, наземное мо- |
|||||||||||||||||||||
бильное лазерное сканирование в отличие от метода ВЛС не требует |
|||||||||||||||||||||
аренды |
|
|
|
|
|
|
|
летательных аппаратов, кроме того, нет такой |
|||||||||||||
зависимости от погоды, как у ВЛС.
уществует еще одно важное отличие − наземные мобильные сканирующие системы можно использовать непосредственно в населенных зонах, так как применяемые в них наземные лазерные сканеры безопасны для зрения. По аналогии с ВЛС логично было бы назвать этот метод съёмки наземное мобильное лазерное сканирова-
154

ние (НМЛС) и в отличие от статичного Наземного Лазерного Сканирования (НЛС). Для сокращенного названия воздушного лазерного сканирования «ВЛС» нет необходимости включать «М» − мобильное, так как другого способа в этом случае нет.
Сложный инструмент, которым являются мобильные сканирующие системы (МСС), интересен и универсален настолько, что самим фактом своего появления определил целый метод топографогеодезической съемки с присущими только ему технологическими приемами работы в полевых и камеральных условиях, характером выходных данных, средствами метрологического обеспечения и т.д.
Основной областью применения НМЛС являются объекты городской инфраструктуры и архитектуры, а также протяженные линейные объекты, такие как линии электропередачи, автомобильные и железные дороги, аэродромы, трубопроводы, береговая линия и пр.
НМЛС |
используется не |
|
|
|
И |
||||||
только для создания но- |
|
|
|
||||||||
вых и обновления суще- |
|
|
|
||||||||
|
|
Д |
|||||||||
ствующих |
|
топографиче- |
|
|
|||||||
ских карт и планов круп- |
|
|
|||||||||
ных масштабов, но и для |
|
|
|||||||||
решения |
разноо разных |
|
|
||||||||
инженерно- |
|
|
|
А |
|
|
|||||
геодезических, |
изыска- |
|
|
||||||||
тельс |
, |
|
землеустрои- |
|
|
||||||
тельных, |
электроэнерге- |
|
|
||||||||
т |
ческ |
х, |
|
лесотехн че- |
|
|
|||||
|
|
|
|
|
|
||||||
ск |
х |
друг х задач. |
|
Рис. 12.4. StreetMapper 360. Технология |
|
||||||
|
Модуль |
|
льной |
|
|
||||||
с стемы лазерного кар- |
|
3D-картографирования с дальностью до 300 м |
|
||||||||
|
|
|
|
|
|||||||
|
|
|
|
|
моб |
|
|
|
|||
тограф рован я |
пред- |
|
и рекордной точностью лучше, чем 10 мм |
|
|||||||
|
|
|
|
|
|||||||
ставляют собой ед ную платформу, жестко установленную на крышу |
|||||||||||
стандартных транспортных средств. В нем размещены один или не- |
|||||||||||
|
ких |
|
|
|
|
|
|||||
С |
|
|
|
|
|
|
|
||||
сколько лазерных сканеров с углом обзора до 360о, GPS и инерциальной системой (рис. 12.4). Кроме того, такие системы комплектуются цифровыми фотоаппаратами. При начале движения автомобиля сканеры и фотокамера начинают свою работу, в результате чего на экране компьютера мы видим получаемые от них данные. Это очень наглядно, оператор сразу имеет возможность оценить степень достаточности получаемых данных и наличие мертвых зон в тех или иных
155

местах (рис. 12.5). На случай остановки система может прекратить сбор данных и возобновить его при продолжении движения. Указанные системы поставляются с программным обеспечением, которое наилуч-
шим образом позволяет плани- |
Рис. 12.5. Типичное место оператора |
ровать съемку, ее проведение и |
|
вывод окончательных данных. Плотность сканирования при использовании, например, одного сканера в системе StreetMapper 360 со-
ставляет (табл. 12.1):
Таблица 12.1
Скорость км / час |
25 |
40 |
60 |
80 |
100 |
|
Плотность, точек / м2 |
1440 |
900 |
600 |
450 |
360 |
|
|
|
|
И |
|
||
|
Д |
|
|
|
||
|
А |
|
|
|
|
|
Данные, накопленные за 1 ч съемки, могут быть полностью об-
работаны в течение 1 ч.
Технология лазерной съемки достигла такой ступени развития, когда она позволяет формировать графические изображения исключительного качества, насыщенные структурными и топографически-
Ссъемки12.2. остав и отличие наземных мобильных
ми деталями. В отличие от фотографий, и плоских изображений, получаемые данные на основе лазерного сканирования, являются трех-
мерными по своей пр роде, не тре уют ортотрансформирования и |
|
могут быть получены в ночное время. Работа лазера не зависит от |
|
окружающего освещен я, что является существенным для мобильной |
|
наземной |
б, поскольку сканирование можно проводить ночью, |
когда дв жен |
н мально. |
сканирующих систем
На сегодняшний день системы мобильного картографирования предлагают пользователям канадская компания Optech Inc. и германская IGI mbH-Riegl . Обе эти компании занимаются также производством аэросъемочных лидаров, иначе называемых воздушными ла-
156

зерными сканерами или локаторами. И это не просто совпадение, поскольку методики получения данных съемки с использованием автомобильных и авиационных платформ не имеют принципиальных отличий. В обоих случаях в качестве основного источника данных при-
меняются сканирующие лазерные дальномеры, съемка ведется в ди- |
|
намическом режиме, а координатная привязка осуществляется за счет |
|
использования систем прямого геопозиционирования, принцип дей- |
|
|
И |
ствия которых основан на обмене данными в реальном времени меж- |
|
ду системой спутниковой навигации GPS (ГЛОНАСС) и инерциаль- |
|
ной системой. |
|
Единственное существенное функциональное отличие в системе |
|
прямого геопозиционирования, используемой для автомобильных |
|
|
Д |
платформ, это появление третьего независимого источника навигаци- |
|
онной информации: датчика скорости или пройденного пути. Этот |
|
дополнительный источник геопространственной информации позволяет получить еще более точное и достоверное навигационное решение. Количество сканирующих модулей, схема их установки и развертка, как правило, отличаются от аэросъемочных систем. В системах мобильного картографирования чаще применяют не один, а от двух до четырех сканирующих модулей, что обеспечивает более полное покрытие сцены съемки во всех ракурсах и минимизирует теневые участки. Что касается траектории сканирования (развертки), то по общему признанию специалистов, оптимальной является круговая развертка, так, как это исполнено в системе Lynx компании Optech
или в новой модели StreetMapper360.
|
Для |
|
дополнительной информации сканирующие бло- |
|
ки часто ком |
руются с цифровыми фотокамерами, видеокамера- |
|||
ми, теплов зорами |
|
А |
||
|
пр. Совместное использование лазерно- |
|||
локац онных |
фотограф ческих данных позволяет при визуализации |
|||
назначать каждой лазерной точке её естественный цвет, что приводит |
||||
к |
появлен ю |
бфотореал стичных трёхмерных цифровых моделей |
||
(р |
с. 12.6, 12.7). |
|
|
|
|
получения |
|
||
С |
|
|
|
|
Рис 12.6. Каркасная 3D модель в формате CAD с лазерными данными
157
Рис. 12.7. 3D текстурированная модель. Анализ маршрута при перевозке грузов нестандартных размеров

Все устройства жестко крепятся на специальной платформе, которая, по заявлениям производителей, может быть установлена «практически на любой автомобиль». В определенном смысле это
действительно так, хотя в каждом конкретном случае возникает мно- |
|
жество вопросов, связанных с обеспечением допустимой механиче- |
|
|
И |
ской нагрузки, режимом электропитания, согласованием схемы уста- |
|
новки с дорожной полицией и пр. |
|
По сравнению с аэросъемочными лидарами системы мобильного картографирования гораздо меньше зависят от погодных условий. Однако сама область их применения для исследования городских территорий часто означает съемку в неблагоприятной GPS-обстановке, когда количество наблюдаемых спутников сильно ограничено, так как видимость закрыта радионепронициемыми объектами (высотные дома, деревья и пр.). Особенно сложная ситуация наблюдается, если съемку приходится вести в тоннелях. ля компенсации неблагоприятной GPS-обстановки разворачивают сеть съемочного обоснования (в городских условиях возможности геопривязки значительно больше, чем в чистом поле), выбирают ведение съемки на коротких дальностях (как правило, до 100 м), таким образом уменьшая ошибку опре-
деления пространственных координат из-за погрешности угловых |
||||||
элементов внешнего ориентирования, и используют специальное про- |
||||||
|
|
|
|
Д |
|
|
граммное о еспечение, которое на камеральной стадии позволяет |
||||||
компенсировать |
ки инерциальной системы, оставшейся без GPS- |
|||||
|
|
поддержки. |
|
|
||
|
|
|
Классические |
мобильные |
системы |
|
|
|
А |
|
|
||
|
|
устанавливаются без всяких ограничений и |
||||
|
|
успешно эксплуатируются и с плавучих |
||||
|
|
платформ (рис. 12.8), хотя у мобильного |
||||
|
|
картографирования «с воды», несомненно, |
||||
б |
|
|
|
|||
оши |
есть свои особенности, которые выделяют |
|||||
этот вид съемки среди аналогичных. |
||||||
|
Компания Applanix предложила |
|||||
первую из известных истории морскую (а |
||||||
|
|
равно речную и озерную) систему мобиль- |
||||
|
|
ной |
|
съемки, |
имеющую |
название |
|
|
LANDMark Marine. |
|
|
||
Рис. 12.8. StreetMapper 360 – |
|
|
|
|
|
|
СRiver. Прибрежные съёмки |
|
|
|
|
|
|
158

Система мобильного картографирования LYNX Mobile Mapper, разработанная канадской фирмой Optech полностью решает задачи инженерного и топографического обследования протяженных объектов (улицы, проспекты, коммуникации и другие объекты инфраструктуры города), где неэффективно, затруднено или невозможно использование стационарных наземных сканеров, а технология воздушного лазерного сканирования не обеспечивает необходимую плотность и точность сканирования.
Система LYNX Mobile Mapper особенно актуальна для сбора данных лазерного сканирования в условиях города: при скорости обследования до 100 км/ч она обеспечивает беспрецедентную детальность трехмерных изображений со средней абсолютной точностью лучше пяти см (при этом дальномерная точность составляет ±7 мм) и плотностью данных вплоть до первой точки на 1 см 2. Технические характеристики даны в табл. 12.2.
|
|
|
|
|
|
|
Таблица12.2 |
|
|
|
|
|
|
И |
|
|
Максимальная дальность |
|
>100 м (при 20% отражательной |
||||
|
|
способности) |
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
|
Дальномерная точность |
|
7 мм (1 sigma) |
|
|
||
|
|
|
|
|
|||
|
Пространственное разрешение |
|
До 1 см на скорости 100 км/ч |
|
|||
|
|
|
|
|
Д |
|
|
|
Абсолютная точность |
|
Лучше 5 см (при хорошей GPS обстановке) |
||||
|
|
|
|
|
|||
|
Система прямого геопозициониро- |
Applanix POS LV 420 |
|
|
|||
|
вания и ориентирования IMU/GPS |
|
|
|
|
||
|
Угол обзора сканера |
|
360° при отсутствии препятствий |
||||
|
|
|
А |
|
|
||
|
Частота скан рован я |
|
До 9000 об/мин |
|
|
||
|
|
|
|
||||
|
Частота мпульсов |
|
100 000 импульсов/с для каждого сканера |
||||
|
|
|
|||||
|
Ч сло змерен й для одного мпульса |
До четырех отражений одного луча |
|||||
|
|
б |
|
|
|
||
|
Ч сло сканеров |
|
|
От 1 до 4 |
|
|
|
|
|
|
|
|
|
|
|
|
Ч сло фотокамер |
|
|
До 2 |
|
|
|
|
|
|
|
|
|||
|
Возможность |
|
|
Пригодно на любые транспортные средства |
|||
|
установки |
|
|
|
|
|
|
|
Рабочие температуры |
|
-20° до 40 °C (внешняя) |
|
|||
|
|
|
|
|
|
||
|
Температура хранения |
|
-40 до 80 °C |
|
|
||
С |
|
|
|
|
|
|
|
Данная система может включать несколько лазерных сканеров (до четырех) и цифровых фотокамер (до двух). Использование нескольких сенсоров позволяет оптимизировать зону охвата и минимизировать зону лазерной тени. Съемочный комплекс представляет со-
159
бой единый, жестко устанавливаемый на крышу модуль, подходящий к стандартным транспортным средствам и допускающий небольшие механические «адаптации». Поставляемый модуль содержит две платформы для установки сканеров с возможностью их переориентирования, два посадочных места для камер и крепление для установки антенны системы IMU/GPS. Жесткость блока и всех креплений гарантирует неизменность пространственных и угловых «выставочных» параметров.
Программное обеспечение состоит из двух частей LYNX-Survey
и LYNXProcess.
Система позволяет получать геопространственные данные для:
• высокоточных цифровых карт и трехмерных моделей рельефа,
растительности и объектов городской застройки; |
|
|
|||
• |
предпроектных |
топографических |
и |
инженерно- |
|
изыскательских работ; |
|
|
И |
||
• |
исполнительной документации; |
||||
• |
|
|
|
||
мониторинга коммуникаций и оценки их технического состо- |
|||||
яния; |
|
|
|
|
|
• планирования ремонтных и регламентных работ; |
|
||||
• |
кадастра; |
|
Д |
|
|
• |
3-D моделирования городов; |
|
|||
|
|
|
|||
• охраны исторических и культурных памятников;
Средачдорогит.д., спец ал сты могут построить высокоточные трехмерные компьютерные модели. Полученные модели чрезвычайно важны для
• обследования открытых карьеров и пр.
Система Lynx Mobile Mapper о ладает уникальными возможно-
стями по быстрому трехмерному сканированию автодорог, инфраструк- |
|
|
А |
туры, здан й |
сооружен й. Сканирование производится лидарами, |
установленными на транспортном средстве. Благодаря сканированию |
|
всех деталей |
ее окрестностей, включая дорожные ограждения, |
|
б |
трещ ны в дорожном покрытии, кюветы, воздушные линии электропе- |
|
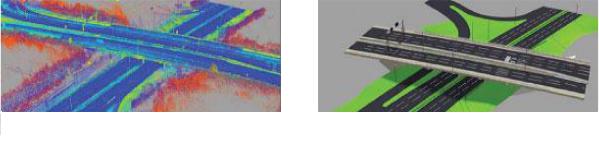
планирования новой схемы дорог и их ремонта, для оценки маршрутов перевозки негабаритных грузов и управления инфраструктурой
(рис. 12.9).
Рис. 12.9. Транспортная развязка: трехмерное облако точек / трехмерная
CAD-модель
160
Системы НМЛС позволяют легко и быстро собирать лидарные данные для нужд железнодорожного сообщения. Установки на самоходной дрезине или специально модернизированном автомобиле (см. рис.12.3) продемонстрировали способность систем обеспечивать данные необходимой точности для инфраструктуры железных дорог. Традиционные методы топографической съемки требуют частых измерений на подошве рельса, головке рельса и подошве противоположного рельса. Это трудоемкий, нарушающий нормальную работу железной дороги, а иногда и опасный, процесс. Сбор лидарных данных занимает гораздо меньше времени и сводит к минимуму нарушение железнодорожного сообщения. Люди не подвергаются опасности, а измерения могут проводиться чаще, режим их легко выбирается оператором.
Аппаратная часть системы: |
|
|
И |
|||||
• управляющий / навигационный блок; |
||||||||
• |
интерфейс оператора; |
|
|
|||||
• |
|
|
|
|
|
|||
один и более (до четырех) лазерных сенсоров; |
|
|
||||||
• одна или две цифровые фотокамеры; |
|
|
|
|||||
• |
две платформы для установки сканеров с возможностью их |
|||||||
переориентирования; |
|
Д |
|
|
||||
• |
накопитель данных; |
|
|
|||||
|
|
|
|
|
||||
• |
антенна системы IMU/GPS; |
|
|
|
|
|
||
• система навигации POS LV 420; |
|
|
|
|
||||
• |
|
|
ка ели. |
|
|
|
|
|
С стемы Topcon IP-S2 и Topcon IP-S2 HD (рис. 12.10) обладают |
||||||||
|
|
|
А |
|
|
|
||
возможностями высокоскоростной съемки больших площадей и линей- |
||||||||
ных объектов достаточной точностью. |
Это открывает перед ними |
|||||||
|
|
б |
|
множество различных |
ва- |
|||
|
|
|
риантов |
применения, |
где |
|||
соединительные |
|
|
||||||
|
|
скорость съемки традици- |
||||||
|
|
онными |
способами могла |
|||||
|
|
бы значительно замедлить |
||||||
|
|
работу. |
|
|
|
|||
С |
|
|
|
|
|
|
||
|
|
|
При создании этих |
|||||
|
|
|
систем |
пришлось |
решать |
|||
|
|
|
задачу |
интеграции |
высо- |
|||
|
|
|
коскоростных лазерных |
|||||
|
|
|
сканеров, блока инерци- |
|||||
|
|
|
|
|
||||
Рис. 12.10. Система IP-S2 HD мобильного |
альных |
измерений, спут- |
||||||
|
|
картографирования |
|
|
|
|
|
|
161
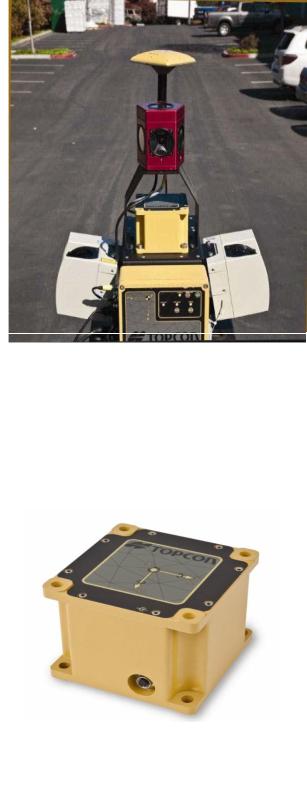
никового приемника, обеспечивающего точное позиционирование системы, другого оборудования (цифровых камер, датчиков-одометров и др.), а также компьютера с программным обеспечением для оператив-
ного управления системой и сохранения собранных данных. |
|
||||||||||
|
|
Состав систем |
|
|
|
И |
|||||
|
Системы |
Topcon |
IP-S2 |
|
|
||||||
|
|
|
|
|
|||||||
(рис. 12.11) и |
|
Topcon IP-S2 HD |
|
|
1 |
|
|||||
(рис. 12.15) являются модульны- |
|
|
|
|
|||||||
ми и |
состоят |
из |
ряда |
блоков, |
|
|
|
|
|||
каждый из которых отвечает за |
|
|
2 |
|
|||||||
|
|
|
|
||||||||
свою задачу в процессе сбора |
|
|
|
|
|||||||
данных. Технические характери- |
|
|
|
|
|||||||
стики приведены в табл. 12.3. |
|
|
|
|
|||||||
|
|
GNSS-приемник |
|
|
|
3 |
|
||||
|
Используемые |
двухчастот- |
|
|
|
|
|||||
|
|
|
|
|
|
|
А |
|
|
||
ные приемники могут принимать |
|
4 |
|
4 |
|||||||
как сигнал системы GPS, так и |
|
|
|
|
|||||||
сигнал |
российской |
группировки |
|
|
5 |
|
|||||
спутников ГЛОНАСС. |
|
|
|
|
|
|
|||||
|
|
|
|
б |
|
|
|
|
|||
|
Блок инерциальных изме- |
Рис.12.11. Система Topcon IP-S2: |
|
||||||||
рений дает системе точные дан- |
1 |
− Дантенна GNSS-приемника; |
|
||||||||
ные об ориентации автомо иля в |
2 |
− панорамная фотокамера; |
|
||||||||
процессе движения. Кроме того, |
3 |
− блок инерциальных измерений; |
|
||||||||
|
|
|
|
||||||||
лом. |
мостами |
|
|
4 |
− сканеры; |
|
|
||||
при |
кратковременном |
|
локиро- |
5 – блок управления |
|
||||||
ван |
|
с гналов GNSS (в случае |
|
|
|
|
|||||
проезда под |
|
|
|
ли в тон- |
|
|
|
|
|||
нелях) данные лока нерциальных |
|
|
|
||||||||
змерен й наряду с друг ми дан- |
|
|
|
||||||||
С |
|
|
|
|
|
|
|
|
|
||
ными |
(напр мер, |
с |
|
датчиков- |
|
|
|
||||
одометров) |
спользуются для ин- |
|
|
|
|||||||
терпретац |
коорд |
нат |
транспорт- |
|
|
|
|||||
ного средства с заданным интерва- |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
Рис. 12.12. Блок инерциальных |
|
|
|
|
|
|
|
|
|
|
|
|
измерений |
|
162

|
|
|
|
|
|
|
|
|
Таблица 12.3 |
|
|
|
|
|
|
|
|||||
|
|
|
|
40 каналов, all-in-view, L1, L1 GPS, L1/L2 GPS, |
|
|||||
|
Каналы |
|
L1/L2 ГЛОНАСС, L1/ L2 GPS + L1/ L2 ГЛОНАСС, |
|
||||||
|
|
|
|
WAAS |
|
|
|
|
|
|
|
Отслеживание слабого сигнала |
|
|
Менее 30 dBHz |
|
|
|
|
|
|
|
Холодный / теплый старт |
|
|
< 60 с / < 10 с |
|
|
|
|
|
|
|
Перезахват |
|
|
|
< 1 с |
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
||
|
Вибрации |
|
|
|
Динамические, до 30 g |
|
|
|||
|
Дополнительные функции |
|
|
Multipath Mitigation, Co-Op Tracking |
|
|||||
|
Положение в реальном времени и |
|
Частота обновления до 20 Гц |
|
||||||
|
сырые данные |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
||||
|
RTCM SC104 v2.1 and 2.2 |
|
|
Ввод / Вывод |
|
|
|
|
|
|
|
NMEA 0183 v2.1, 2.2, 2.3 & 3.0 |
|
|
Вывод |
|
|
|
|
|
|
|
|
|
Блок инерциальных измерений |
|
|
|
||||
|
Частота передачи данных |
|
|
100 Гц |
|
|
|
|
|
|
|
Частота смещения сдвига гироблока |
|
1, 3, 5°/ч |
|
|
|
|
|
||
|
|
|
|
А |
|
|
|
|
|
|
|
Питание |
|
|
Topcon IP-S2 HD |
|
|
|
Topcon IP-S2 |
|
|
|
Напряжение питания |
|
Постоянное 12-14 В, 50 А |
|
9-28В |
|
||||
|
Потребляемая мощность |
|
|
Примерно 300 Вт |
|
|
||||
|
Физические характеристики |
|
Topcon IP-S2 HD |
|
|
|
Topcon IP-S2 |
|
||
|
|
б |
|
|
|
|
|
|
||
|
Габариты / Масса |
|
|
1422 x 699 x 1245 мм, 82 кг |
|
|||||
|
Условия эксплуатации |
|
Topcon IP-S2 HD |
|
|
|
Topcon IP-S2 |
|
||
|
Температура ра очая/хранения |
|
–10 ... +40 °C/ |
–30..+60 °C/– 45..+80 °C |
|
|||||
|
|
Порты ввода/вывода |
|
|
|
|
|
|||
|
Тип |
|
|
|
|
|
|
|
|
|
|
CAN - шина |
|
|
|
OBDII - MOLEX-9 Pin |
|
|
|||
|
Кодировщик |
|
|
|
Квадратурный вход TTL |
|
|
|||
|
Сетевое подключен е Ethernet |
|
|
100 Base-T |
|
|
|
|
|
|
|
USB 2.0 |
|
|
|
Вход/Выход |
|
|
|
|
|
|
Последовательный порт |
|
|
До 2 Мб/с |
|
|
|
|
|
|
Скоростной |
|
|
|
|
|
|
|
|
|
|
|
RS-232-/422 |
|
|
|
|
|
|
|
|
|
|
ц фровой порт I/O (x4) |
|
LVDS 400 Мб/с |
|
|
|
|
|||
|
Лазерные сканеры |
|
Topcon IP-S2 HD |
|
|
Topcon IP-S2 |
|
|||
|
|
|
|
|
|
|
||||
|
|
|
|
Velodyne® |
Два SICK™ LMS 291S05, |
|
||||
|
|
|
|
HDL-64E S2 |
|
|
|
|
|
|
|
|
|
|
|
|
Один SICK™ LMS 291-S14 |
|
|||
|
Угол сканирования/угловое разре- |
30.13º/0.4º |
|
LMS 291-S05 - 180°/1° |
|
|||||
|
шение |
|
|
|
|
|
LMS 291-S14 - 90°/0.5° |
|
||
|
Типичная точность измерения |
|
± 20 мм |
|
|
|
± 45 мм |
|
||
|
Диапазон измерения |
|
120 м (отраж. способность 80%), |
30 м |
|
|||||
|
|
50 м (отраж. способность 100%) |
|
|
||||||
|
|
|
|
|
|
|||||
|
Частота передачи данных |
|
1,333 млн точек в секунду |
|
75 Гц через Ethernet |
|
||||
|
|
|
|
|
|
|
|
|
|
|
163

Topcon IP-S2 HD может комплектоваться панорамной фотокамерой высокого разрешения, собирающей до 15 кадров в секунду. Полученные фотографии могут использоваться для окрашивания облаков точек или просто для получения изображений, привязанных по
времени и текущей позиции. |
|
|
|
И |
|||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Д |
||||
Рис. 12.13. Фотография, полученная цифровой панорамной |
|||||||||
|
|
|
|
А |
|
|
|||
|
камерой (фотография – слева, камера – справа) |
||||||||
|
|
|
|
В системе может ис- |
|
||||
|
|
|
пользоваться до шести лазер- |
|
|||||
|
|
|
ных сканеров. В конфигура- |
|
|||||
|
|
|
ции Topcon IP-S2 HD (рис. |
|
|||||
|
|
|
12.15) используется лазерный |
|
|||||
|
|
|
сканер Velodyne HDL-64E. |
|
|||||
сканерами |
|
|
|
|
|
||||
Рис. 12.14. Система |
Сканер выполняет |
до 1,333 |
|
||||||
Topcon IP-S2 |
|
млн измерений |
в |
секунду, |
|
||||
с тремя |
|
|
меющих метку |
времени |
и |
Рис. 12.15. |
|||
|
|
|
геопр вязку. В |
универсаль- |
Topcon IP-S2 |
||||
|
|
|
ной конфигурации Topcon IP- |
HD со скане- |
|||||
|
|
|
ром Velodyne |
||||||
|
|
|
S2 (р с.12.14) используются 3 |
HDL-64E. |
|||||
|
|
блазерных сканера: два сканера с обзором 180° |
|||||||
|
|
|
для сканирования ситуации справа и слева от |
||||||
|
|
|
маш ны и один сканер с обзором 90°, ориенти- |
||||||
|
|
|
рованный по оси движения транспортного сред- |
||||||
|
|
|
ства. Сканеры выполняют до 40 000 измерений в |
||||||
|
|
|
секунду, имеющих метку времени и геопривязку. |
||||||
|
|
|
|
Датчик закрепляется |
непосредственно на |
||||
Рис. 12.16. Датчик |
колесе автомобиля и используется для определе- |
||||||||
ния скорости и пройденного пути. Аналогичная |
|||||||||
колеса (одометр) |
|||||||||
С |
|
|
информация может |
быть |
получена системой |
||||
Topcon IP-S2 или Topcon IP-S2 HD и из CAN-шины автомобиля.
164